基于HSV色彩空間與形狀特征的交通燈自動識別
2015-06-22 14:40:00朱永珍孟慶虎普杰信
電視技術 2015年5期
朱永珍,孟慶虎,2,普杰信
(1.河南科技大學 信息工程學院,河南 洛陽 471003;2.香港中文大學 工程學院,香港 99907)
基于HSV色彩空間與形狀特征的交通燈自動識別
朱永珍1,孟慶虎1,2,普杰信1
(1.河南科技大學 信息工程學院,河南 洛陽 471003;2.香港中文大學 工程學院,香港 99907)
為了在復雜的環境中準確識別出交通燈信息,提出一種基于HSV色彩空間和形狀特征的交通燈識別方法。該方法首先將圖像的RGB色彩空間轉換成HSV色彩空間,并根據HSV色彩空間中的H與V無關性,利用不同顏色的H閾值對圖像進行分割提取候選區域;然后對原圖像經預處理及灰度形態學操作后,利用Hough變換檢測目標可能位置;最后把目標疑似位置與候選區域進行邏輯濾波融合,并對融合后圖像依據顏色H值判定交通燈信息。該方法對480幅各種場景下的交通燈圖片進行實驗,結果表明該方法具有很強的魯棒性、穩定性和高效性,能夠較好地識別出交通燈。
交通燈識別;HSV色彩空間;H分割;Hough;圖像融合;
隨著智能交通系統的發展,交通燈的檢測和識別成為了智能交通系統的一個熱門研究方向,同時也是無人智能車研究的關鍵技術和難點之一。如何能自動精確對交通燈檢測和識別,有助于駕駛員對可能出現的危險做出預警并輔助駕駛,并有助于無人駕駛的智能車的安全行駛。因此,交通信號燈的檢測和識別技術無論理論還是應用都具有非常重要的研究價值。
目前,交通燈的識別主要的方法分為以下幾類:
1)基于某個色彩空間的交通燈識別算法,核心在于選擇某個色彩空間對交通燈顏色進行分割。文獻[1-3]提出了利用RGB色彩空間對圖像進行分割的提取候選區域,優點是不需要對色彩空間變換,節省時間,滿足實時性要求,缺點是RGB對亮度敏感,亮度一旦改變就會降低對交通燈的正確識別率。文獻[4]通過HSV色彩空間對三色交通燈取樣,依據3種色彩交通燈的H值和S值分別為每種色彩建立二維高斯模型,文中給出的實驗數據表明,該算法雖具有較高的識別準確率,但每個像素都需要計算高斯分布的概率,計算量大,達不到實時處理的要求。
2)基于形狀的檢測方法是利用了交通燈的形狀信息,主要有模板匹配法[5]、Hough變換法、邊緣檢測法[3]等。模板匹配法比較簡單直接,但是不具有旋轉不變性和尺度不變性,匹配的效果較差;Hough變換抗噪效果好,對簡單圖形有很好的檢測效果,但計算速度較慢;當背景復雜時邊緣檢測法會產生大量的無效邊緣,處理效果顯得比較差,尤其是存在噪聲效果就會更差。
針對目前交通燈識別方法存在的問題,本文提出利用HSV色彩空間和形狀特征的交通燈識別方法。該方法首先將圖像的RGB色彩空間轉換成HSV色彩空間,依據HSV色彩空間中的H信息進行分割提取顏色候選區域;然后將原彩色圖像轉化成歸一化的灰度圖像,并對歸一化圖像進行預處理及灰度形態學操作之后用Hough變換檢測目標疑似位置;最后,把目標疑似位置與將候選區域進行融合并依據顏色H值判斷,完成對交通信號燈的識別。本文選擇HSV色彩空間有效避免了RGB色彩空間易受外部光照變化的影響;經過圖像預處理及灰度形態學操作大大縮短了圖像未處理之前Hough變換檢測形狀所需要的時間;通過對圖像進行邏輯濾波融合,進一步濾除掉干擾信息,從而更加準確地識別出交通燈顏色信息。
1 算法描述
1.1 總體算法描述
對交通燈識別的算法基本流程如圖1所示。

圖1 算法流程圖
1.2 提取候選區域
1.2.1 色彩空間的轉化
RGB色彩空間是一種最基本、最常用的面向硬件的顏色空間,它建立在一個單位長度的立方體笛卡爾坐標系中,通過R,G,B三通道顏色的相互疊加得到各式各樣的顏色,但它對亮度比較敏感,易受自然光照、遮擋、陰影等情況的影響。若亮度改變,R,G,B三個分量都會隨之改變,而且RBG空間內的任意一色彩都是通過R,G,B三個分量的共同作用,三個分量相關性很高,無法用單一的參數進行數字化調整。因此,為了能夠在復雜環境下快速提取顏色分量,同時符合人的經驗和人眼感知特點,本文引入HSV色彩空間。HSV色彩空間的模型是一個圓錐模型,是由色調(Hue)、飽和度(Saturation)和亮度(Value)三個分量組成,且H與V相互獨立,顏色按逆時針從左到右均勻變化。
從RGB到HSV的轉換是一個簡單的非線性變換[6]。RGB到HSV空間的量化及過程:
1)對RGB進行歸一化處理,即
(1)
2)從RGB色彩空間到HSV色彩空間進行轉換,即
(2)
(3)
(4)
V=Cmax
(5)
1.2.2 候選區域的提取
圖像分割把圖像分成若干個特定的、具有特定性質的感興趣的區域,目的是使得圖像更容易理解和分析。大多數的圖像分割是針對灰度圖像的,由于彩色圖像提供了比灰度圖像更加豐富的信息,而且每一種色彩都對應唯一的H值,這就為圖像的精確分割提取候選區域提供了依據。本文中紅、黃、綠區域是感興趣區域,因此利用基于閾值的分割方法提取候選區域。為了獲取交通燈三色H值信息,本文采集早上和中午兩個時間段的8張圖片,通過三色取樣在歸一化HSV色彩空間中作直方圖得到交通燈H值分割閾值區間t,如圖2所示。
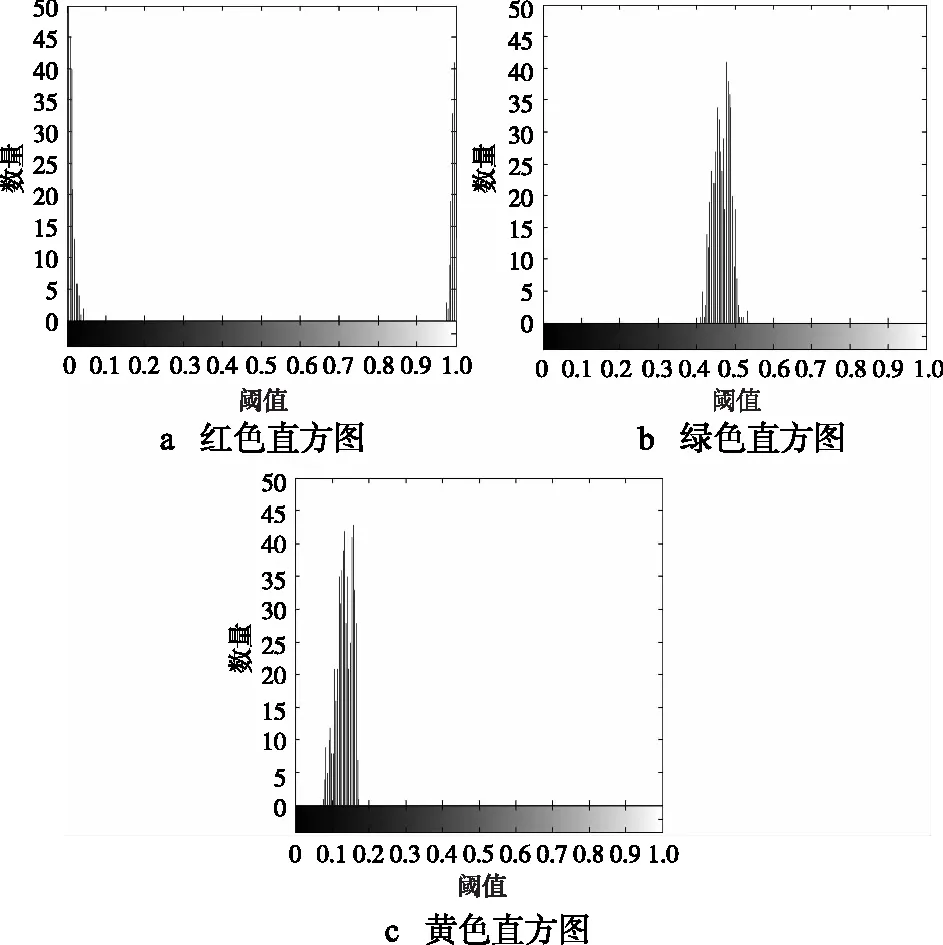
圖2 三色直方圖
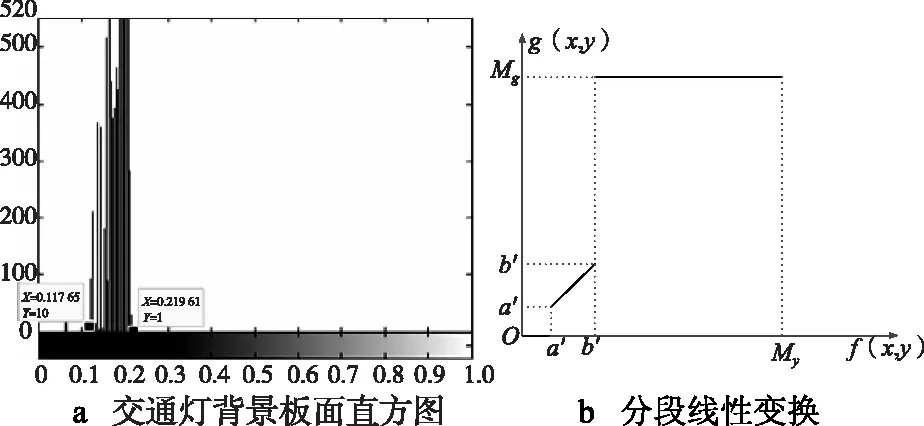
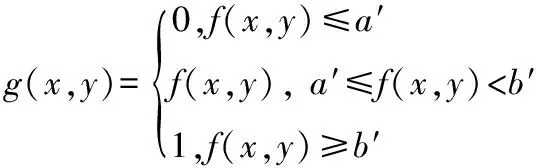
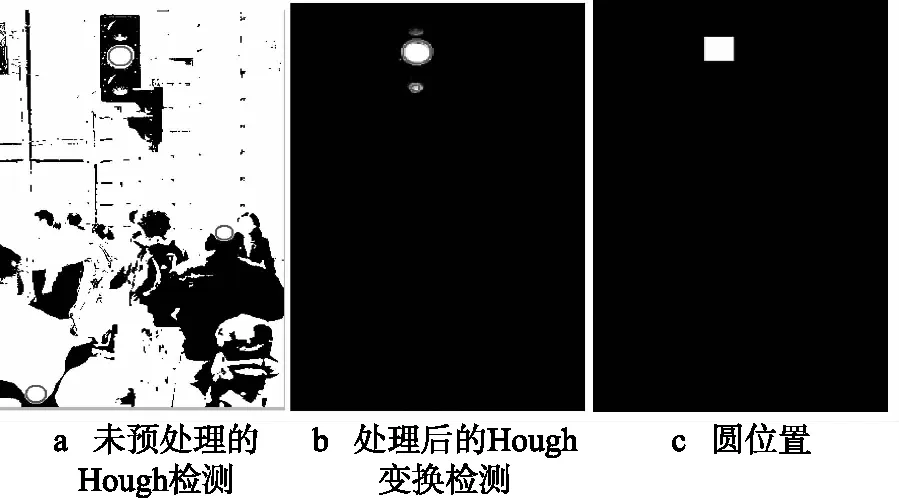
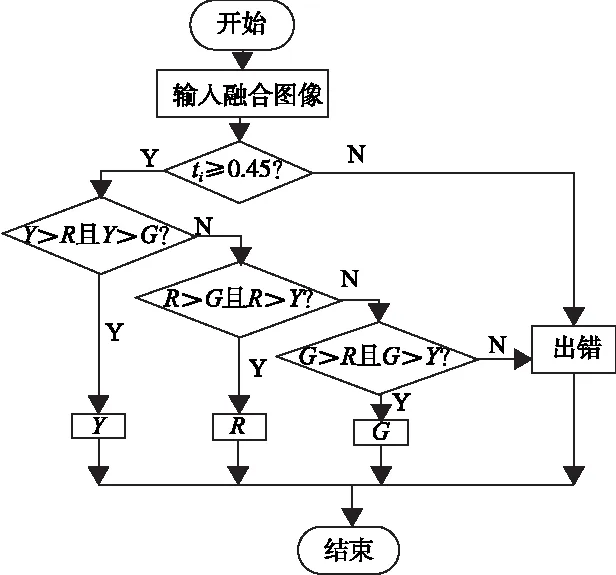
從圖2中看到紅色閾值范圍:H>0.96或H<0.023;綠色閾值范圍:0.32 圖3 分割前后圖像 1.3 交通燈疑似位置提取 目前交通燈的一般特征是背景板面為正方形或長方形,內接一個或若干個圓,背景板面灰度值比較低。本文利用交通燈的這一特征對原圖像進行提取紅綠燈疑似位置。具體提取流程如下: 1)將彩色圖像歸一化、灰度化; 2)根據交通燈的特征對歸一化圖像進行線性變換,使得低于板面灰度的全0顯示,高于板面灰度的為全1顯示; 3)將變換后的圖像采用灰度形態學方法進行操作; 4)將1)操作之后的圖像取反與3)操作后的圖像進行矩陣的點乘運算; 5)利用Hough變換檢測。 線性變換[8]可以將圖像灰度區間分成若干段,每段對應一個局部的線性變換。為了只顯示與交通燈背景板面相近的灰度,屏蔽掉與交通燈無關的一些信息,因此要獲取交通燈板面的灰度范圍。本文通過大量交通燈的板面進行實驗得到的交通燈背景板面的灰度范圍為[0.12,0.22],如圖4a所示。圖4b表示利用坐標表示線性變換后的圖像,設圖像f(x,y)灰度范圍為[0,Mf],圖像g(x,y)灰度范圍為[0,Mg],變換后若灰度值小于a′輸出為0,若灰度值大于b′輸出為全1,線性變換公式如式(6),其中[a′,b′]取橫軸坐標為[0.12,0.22]。 圖4 背景板面直方圖及線性變換(截圖) (6) 圖像經線性變換以后,圖像仍然存在其他的干擾信息,因此有必要經過灰度形態學腐蝕操作對圖像內部做濾波處理去掉這些干擾信息。灰度形態學腐蝕運算為 (7) 式中:x-i,y-j∈Df,i,j∈Dg;f代表圖像灰度值;g代表結構元素的灰度值;Df是f的定義域;Dg是g的定義域。經形態學腐蝕操作后,提高了Hough變換的檢測準確性,大大縮短了Hough變換檢測的時間。 Hough變換是從圖像中識別出幾何形狀的基本方法之一,它具有很好的抗噪性、容錯性和魯棒性。文獻[9-11]中給出了快速檢測圓的Hough變換的方法。本文根據停車線之外的4~5m距離所拍攝的交通燈圖片估計交通燈的半徑范圍,以高梯度像素作為圓心,通過投票累加的方式,計算累加器陣列的最值即為圓心的位置。如果圖像中沒有檢測到交通燈信息,在檢測階段直接給提示安全信息。 Hough變換檢測結果及交通燈位置如圖5所示。 圖5 Hough檢測及圓位置確定 1.4 圖像融合 圖像融合是對同一圖像經過去噪,時間、空間配準和重采樣后,運用某種融合技術將兩幅或多幅圖像合成一幅更適合計算機檢測、分類、識別以及原始圖像無法表現某些特征的新圖像過程。根據信息表征層次的不同,圖像融合可分為像素級融合、特征級融合和決策級融合[12]。像素級圖像融合指的是直接對各幅圖像的像素點進行信息綜合的過程,像素級融合算法有空間域和變換域算法兩種,空間域算法包括邏輯濾波法、對比度調制法、灰度加權平均法等,變換域算法包括小波變化法、金字塔分解法等。特征級圖像融合是在像素級融合的基礎上,對圖像進行特征抽取后,將邊沿、形狀、輪廓等信息進行融合處理的過程,方法包括模式相關法、參數模板法、統計分析法等。決策級圖像融合是在信息表示的最高層次上進行的融合處理,主要在于主觀的要求,同樣也有一些規則,方法主要有貝葉斯法、表決法、D-S證據法等。根據本文提取交通燈背景板的要求,選擇像素級中的邏輯濾波過濾法。 邏輯濾波法是將圖像中的兩個或多個像素通過邏輯運算合成一個像素的直觀方法。邏輯運算包括“與”,“或”,“非”3種,運算的結果為“0”(假)或“1”(真),邏輯假在灰度圖像上表示為0,邏輯真在灰度圖像上表示為255。由于本文是清除掉交通燈面板的其他干擾信息,因此利用“與”濾波器,即 (8) 1.5 交通燈識別 對融合后圖像依據H閾值統計交通燈顏色信息,通過統計顏色信息判定交通燈的狀態,從而完成識別。在拍攝黃燈時,由于黃光透過玻璃罩周圍會反射出紅光,影響了判定結果。因此本文通過設定一個閾值,降低不利因素的影響,得出正確的判斷,假設在黃燈亮時的面積為100個像素,允許反射出紅燈,像素面積最大為45個像素,若超過45個像素,即紅色與黃色面積比超過0.45,提示報錯處理。假設R, Y ,G分別為紅,黃,綠三色的總和,region是要統計的顏色區域,有 (9) (10) 本文對融合后的圖像顏色進行判定,流程圖如圖6所示。 圖6 顏色判定流程圖 2.1 實驗環境與平臺 為了驗證提出交通燈識別方法的有效性,本文利用索尼DSC-HX50相機采集早上和中午兩個時間段在河南省洛陽市開元大道至西苑路所有交通路口的480張圖片作為實驗測試數據,圖片的分辨率為5 184×3 888。實驗測試所用計算機環境是:CPU為3.40 GHz,內存為3.48 Gbyte,操作系統為Windows XP。 2.2 實驗結果 圖7~圖9是交通燈的識別過程及結果。 2.3 識別結果及分析 為了驗證該實驗識別效果,對本文算法和文獻[2,4]算法進行實驗仿真并對結果進行比較分析。正確識別率R為 圖7 紅燈檢測 圖8 黃燈檢測 (11) 式中:numright為正確識別的總數;numwrong為錯誤識別總數。 3種算法的實驗仿真結果對比如表1所示。 表1 實驗結果對比 從表1中可以看出,在不同的時間段,本文算法的正確識別率基本保持穩定狀態,在正確識別率上,本文算法比算法[2]平均提高了10.7%,和算法[2]大致相當,但在時間上,要比算法[10]快很多。實驗表明,本文算法具有更好的魯棒性、穩定性、可行性。 本文提出了一種基于HSV色彩空間和形狀特征的交通燈識別方法,實現了交通燈的準確定位與識別。本文首先使用H分割提取候選區域,然后通過預處理并結合Hough變換檢測目標位置,最后通過候選區域與目標位置進行融合來識別交通燈。通過理論分析與仿真實驗表明,該方法能夠完成復雜背景下的交通燈快速準確的定位與識別,并且在噪聲及光照不均勻的情況下,都具有很好的魯棒性、可行性、穩定性和高效性。 [1]KIMY K,KIMK W,YANGX L.Real time traffic light recognition system for color vision deficiencies[C]//Proc.IEEE International Conference on Mechatronics and Automation.[S.l.]:IEEE Press,2007: 76-81. [2]YING Jie, CHEN Xiaomin, GAO Pengfei, et al.A new traffic light detection and recognition algorithm for electronic travel aid[C]//Proc.2013 Fourth International Conference on Intelligent Control and Information Processing.[S.l.]:IEEE Press, 2013: 644-648. [3]OMACHI M, OMACHI S.Traffic light detection with color and edge information[C]//Proc.IEEE International Conference on Computer Science and Information Technology.[S.l.]:IEEE Press,2009:284-287. [4]SHEN Y, OZGUNER U, REDMILL K, et al.A robust video based traffic light detection algorithm for intelligent vehicles[C]//Proc.Intelligent Vehicles Symposium.[S.l.]:IEEE Press, 2009: 521-526. [5]童剛, 朱鴻博.圖像處理在交通燈判別中的應用[J].微型機與應用, 2013, 32(4): 88-90. [6]RGB to HSV color conversion[EB/OL].[2014-05-10].http://www.rapidtables.com/convert/color/rgb-to-hsv.htm. [7]MOHD ALI N, RASHID M, ALANG N K, et al.Performance comparison between RGB and HSV Color segmentations for road signs detection[J].Applied Mechanics and Materials, 2013(393): 550-555. [8]GONZALEZ R C,WOODS R E,EDDINS S L.數字圖像處理:Matlab版[M].阮秋琦,譯.北京:電子工業出版社,2007:278-282. [9]DAVIES E R.Machine vision: theory, algorithms, practicalities[M].3rd ed.[S.l.]:Morgan Kauffman Publishers,2005. [10]ATHERTON T J,KERBYSON D J.Size invariant circle detection[J].Image and Vision Computing,1999,17(11):795-803. [11]YUEN HK,PRINCEN J,ILLINGWORTH J,et al.Comparative study of Hough transform methods for circle finding[J].Image and Vision Computing,1990,8(1):71-77. [12]毛士藝,趙巍.多傳感器融合技術綜述[J].北京航空航天大學學報,2002,28(5):512-518. 朱永珍(1985— ),女,碩士生,主研圖像處理、模式識別; 孟慶虎(1962— ),博士,博士生導師,IEEE/ASME Transactions on Mechatronics編輯,IEEE Transactions on Fuzzy Systems副編輯,International Journal of Information Acquisition副主編, Journal of Advanced Computational Intelligence and Intelligent Informatics, Journal of Control and Intelligent Systems, 和 Advanced Robotics 的編委以及多個國際學術會議的大會總主席,程序委員會主席和組委會成員等; 普杰信(1959— ),博士,博士生導師,IEEE ICMA國際會議理事會理事,河南省計算機學會副理事長,河南省高校計算機教育研究會副理事長等,主要研究方向為信息處理與智能系統、神經網絡與神經計算、計算機網絡與信息安全。 責任編輯:薛 京 Traffic Light Auto-recognition Based on HSV Color Space and Shape Feature ZHU Yongzhen1, MENG Qinghu1,2, PU Jiexin1 (1.DepartmentofInformationEngineering,HenanUniversityofScienceandTechnology,HenanLuoyang471003,China; 2.DepartmentofEngineering,ChineseUniversityofHongKong,Hongkong999077,China) Traffic light is an important signal that ensures vehicle running smoothly and orderly. It also can improve safety of drivers who are color-blind.In order to recognize the traffic light correctly in complex environment, the traffic light recognition automatically is described.Firstly, by converting the color space form RGB to HSV, the candidate regions of traffic light are extracted using the H,which bases on the independence between H and V in HSV color space.At the same time, RGB image is turned into gray and after preprocessing and gray-scale morphological operation for the gray image, by using a method on the basis of the Hough transform is applied to detect the region that approximate location of the circle shape.Finally,the suspected location of the target regions and candidate regions are fused by using logical filtering, color distribution combined with the position of circle shape to recognize the traffic light.In this process, contrast enhancement and morphological operations and so on are also used.This experiments show that this method is robustness, stability and efficiency. traffic light recognition; HSV color space; H segmentation; Hough; image fusion 國家自然科學基金項目(61301230),河南省重點科技攻關計劃項目(092102210293) TP317.4 B 10.16280/j.videoe.2015.05.036 2014-07-01 【本文獻信息】朱永珍,孟慶虎,普杰信.基于HSV色彩空間與形狀特征的交通燈自動識別[J].電視技術,2015,39(5).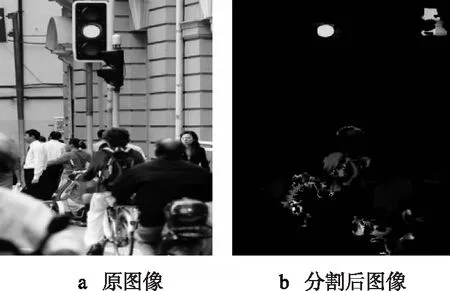




2 實驗結果與分析



3 結束語
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
軍事文摘·科學少年(2017年1期)2017-04-26 18:30:13
海峽科技與產業(2016年3期)2016-05-17 04:32:12
環球人物(2016年9期)2016-04-20 03:03:30