HSV空間和形態(tài)學(xué)處理相結(jié)合的車牌定位方法
2015-06-22 14:40:00苗姣姣徐望明
電視技術(shù) 2015年5期
苗姣姣,徐望明
(武漢科技大學(xué) 信息科學(xué)與工程學(xué)院,湖北 武漢 430081)
HSV空間和形態(tài)學(xué)處理相結(jié)合的車牌定位方法
苗姣姣,徐望明
(武漢科技大學(xué) 信息科學(xué)與工程學(xué)院,湖北 武漢 430081)
車牌定位是實(shí)現(xiàn)車牌自動(dòng)識(shí)別的前提。在傳統(tǒng)的基于RGB彩色空間的形態(tài)學(xué)定位方法的基礎(chǔ)上進(jìn)行改進(jìn),提出了一種HSV彩色空間和圖像形態(tài)學(xué)處理相結(jié)合的車牌定位方法。在HSV彩色空間中將車牌圖像分割為H,S,V這3個(gè)單通道灰度圖像,分別進(jìn)行去噪和二值化處理,然后將這3幅二值圖像做“與”運(yùn)算得到一幅能有效去除背景干擾的二值圖像,再運(yùn)用形態(tài)學(xué)的閉運(yùn)算和開運(yùn)算進(jìn)行處理,得到車牌候選區(qū)域,最后利用車牌寬高比屬性進(jìn)行驗(yàn)證以確定真實(shí)的車牌位置。實(shí)驗(yàn)結(jié)果表明,該方法相對(duì)傳統(tǒng)方法實(shí)現(xiàn)簡(jiǎn)單,車牌定位準(zhǔn)確、高效。
車牌定位;HSV彩色空間;形態(tài)學(xué)
車牌自動(dòng)識(shí)別技術(shù)在現(xiàn)代智能交通系統(tǒng)中的作用舉足輕重,目前已被廣泛應(yīng)用于高速公路收費(fèi)、停車場(chǎng)管理系統(tǒng)、交通違章自動(dòng)記錄等多個(gè)方面。基于數(shù)字圖像處理的車牌識(shí)別系統(tǒng)主要由3個(gè)部分組成:車牌定位、字符分割和字符識(shí)別。車牌定位是實(shí)現(xiàn)車牌自動(dòng)識(shí)別的前提,車牌定位準(zhǔn)確,后續(xù)的字符分割和字符識(shí)別才有意義。近年來(lái),很多研究學(xué)者采用圖像形態(tài)學(xué)處理方法實(shí)現(xiàn)車牌定位,取得了較好的效果,但也存在一定的局限性。文獻(xiàn)[1]和文獻(xiàn)[2]直接將獲取的RGB彩色車牌圖像轉(zhuǎn)換為灰度圖像,去噪并二值化后再進(jìn)行形態(tài)學(xué)處理以定位車牌區(qū)域。該方法能夠有效找到包含車牌的區(qū)域,但實(shí)際上完全忽略了利用車牌顏色信息,受背景干擾的影響較大,往往檢測(cè)到的車牌候選區(qū)域較多,尤其是當(dāng)車牌圖像中有類似車牌區(qū)域(如車燈、廣告牌等)時(shí),定位準(zhǔn)確度會(huì)下降。文獻(xiàn)[2]還進(jìn)一步利用車牌面積、寬高比以及垂直投影特征進(jìn)行綜合分析處理,能剔除大部分干擾區(qū)域,但這種后處理考慮因素較多,增加了計(jì)算量,影響車牌定位效率。
本文充分利用圖像形態(tài)學(xué)處理方法的優(yōu)勢(shì),對(duì)傳統(tǒng)方法進(jìn)行改進(jìn),提出一種將HSV彩色空間和圖像形態(tài)學(xué)處理相結(jié)合的車牌定位方法。對(duì)獲取的RGB彩色車牌圖像,將其轉(zhuǎn)換到HSV彩色空間,利用車牌固有的顏色信息對(duì)H,S,V各通道分別進(jìn)行去噪和二值化處理,然后將3幅二值圖像做“與”運(yùn)算得到一幅能有效去除背景干擾的二值圖像,再在此基礎(chǔ)上進(jìn)行適當(dāng)?shù)男螒B(tài)學(xué)操作,可檢測(cè)到較少的車牌候選區(qū)域,最后僅利用車牌寬高比進(jìn)行驗(yàn)證,即可實(shí)現(xiàn)車牌快速、準(zhǔn)確的定位。
1 車牌定位流程
在基于數(shù)字圖像處理的車牌識(shí)別系統(tǒng)中,車牌定位的目的是從拍攝的汽車圖像中找到車牌所在的位置,從而可將車牌從定位區(qū)域中準(zhǔn)確地分割出來(lái),供后續(xù)的字符分割和字符識(shí)別步驟使用。
目前,我國(guó)汽車牌照按顏色大致可分為藍(lán)底白字、黃底白字、黑底白字和白底黑字4類。其中車牌底色占整個(gè)車牌區(qū)域的大部分,所以車牌區(qū)域的顏色特征以底色為主。
為了充分利用車牌的顏色信息,本文采用基于HSV彩色空間和圖像形態(tài)學(xué)處理相結(jié)合的方法來(lái)進(jìn)行車牌定位。其定位流程圖如圖1所示。
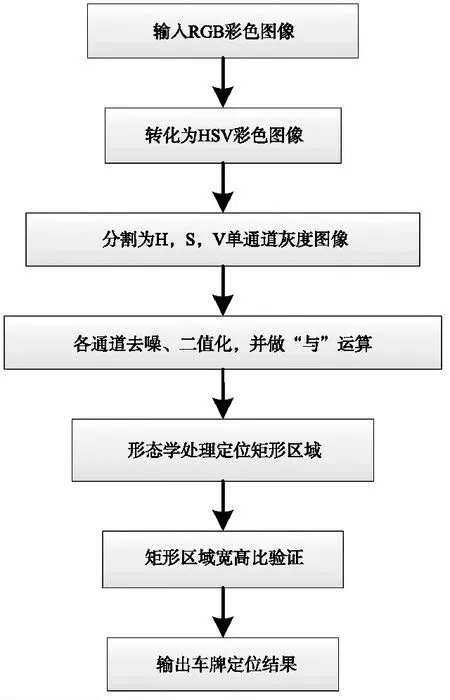
圖1 車牌定位算法流程圖
對(duì)于輸入的RGB彩色汽車圖像,首先根據(jù)彩色空間的轉(zhuǎn)換公式將其轉(zhuǎn)換為HSV彩色圖像,然后將HSV彩色圖像的各通道分割開來(lái),即分割為H,S,V三個(gè)單通道灰度圖像。接著,分別對(duì)這3幅灰度圖像進(jìn)行單獨(dú)處理,主要是去噪(如中值濾波)濾除噪聲和利用車牌的顏色信息設(shè)定閾值進(jìn)行二值化處理,然后將3個(gè)通道的二值化結(jié)果圖像進(jìn)行“與”操作,去除了大量的背景干擾,得到一幅更易于進(jìn)行車牌區(qū)域檢測(cè)的二值圖像。在此基礎(chǔ)上,利用圖像形態(tài)學(xué)處理方法,如閉運(yùn)算和開運(yùn)算,就能快速定位到其中的矩形區(qū)域,作為車牌位置的候選區(qū)域,實(shí)現(xiàn)車牌的初步定位。最后,利用車牌的先驗(yàn)知識(shí)——車牌寬高比對(duì)候選矩形區(qū)域進(jìn)行驗(yàn)證,能有效去除圖中的偽車牌區(qū)域,實(shí)現(xiàn)車牌的精確定位,從而輸出定位結(jié)果。
2 車牌定位的關(guān)鍵步驟
2.1 顏色空間轉(zhuǎn)化
RGB模型和HSV模型是圖像處理中常用的彩色模型。RGB模型采用的是基色原理,利用顏色合成原理來(lái)表示特定的一種顏色,即由紅(R)、綠(G)、藍(lán)(B)3種顏色合成表示。由于RGB的三基色受光照影響較大,當(dāng)車牌圖像的光照條件發(fā)生變化時(shí),在RGB空間中利用車牌的顏色信息進(jìn)行車牌的準(zhǔn)確定位是有困難的。與之不同的是,HSV模型由H,S,V表示,其中H表示色調(diào),S表示飽和度,V表示亮度。H和S包含了圖像的彩色信息,V表示亮度信息,該模型更加符合人眼感受顏色的方式。根據(jù)車牌圖像所具有的顏色特性,使用HSV顏色空間中的3個(gè)分量有助于準(zhǔn)確定位車牌區(qū)域。因此,需要將拍攝到的RGB彩色汽車圖像轉(zhuǎn)化為HSV彩色圖像。
設(shè)所有的顏色分量都已經(jīng)歸一化到范圍[0,1]。在R,G,B這3個(gè)分量中,設(shè)定最大值為MAX,最小值為MIN[3]。給定一幅RGB彩色圖像,色調(diào)分量H的計(jì)算公式為
(1)
飽和度分量S的計(jì)算公式為
(2)
亮度分量V的計(jì)算公式為
V=MAX
(3)
式中:H值的范圍是[0,360°];S值的范圍是[0,1];V值的范圍是[0,1]。
車牌圖像的顏色空間轉(zhuǎn)化效果如圖2所示。

圖2 車牌圖像的顏色空間轉(zhuǎn)化效果
(編者按:本文所有彩圖見(jiàn)http://blog.sina.com.cn/s/blog_707d52790102v1rc.html)。
2.2 二值化
為了利用圖像形態(tài)學(xué)處理方法有效檢測(cè)到車牌候選區(qū)域,需要將車牌圖像二值化。本文采用的方法是對(duì)上述轉(zhuǎn)化得到的HSV彩色圖像的各通道(H,S,V)灰度圖像分別進(jìn)行二值化處理后再做“與”運(yùn)算,從而得到一幅去除了大部分背景干擾的二值圖像。
對(duì)各通道灰度圖像進(jìn)行二值化處理的依據(jù)是車牌的顏色特性。經(jīng)過(guò)大量的實(shí)驗(yàn)分析,相關(guān)研究學(xué)者已經(jīng)總結(jié)一些規(guī)律,揭示了不同車牌H,S,V分量的取值范圍[3]。例如,藍(lán)底白字車牌的底色區(qū)域H,S,V這3個(gè)分量的取值范圍分別為[190°,245°],[0.35,1]和[0.3,1]而黃底白字車牌底色區(qū)域H,S,V分量的取值范圍分別為[25°,55°],[0.35,1]和[0.3,1]。
針對(duì)不同的車牌,在HSV彩色空間中利用這些分量的取值范圍對(duì)各通道的灰度圖像進(jìn)行二值化處理,再對(duì)3幅二值圖像做“與”運(yùn)算便可去除大部分背景干擾,將相應(yīng)的車牌底色區(qū)域顯現(xiàn)出來(lái)。
兩種顏色空間下二值化結(jié)果的對(duì)比效果如圖3所示。以藍(lán)底白字車牌為例,圖3a是在RGB空間下采用自適應(yīng)閾值法得到的二值化結(jié)果,圖3b是在HSV空間下采用本文方法得到的二值化結(jié)果。

圖3 兩種顏色空間下的二值化結(jié)果對(duì)比
可見(jiàn),在RGB空間下進(jìn)行二值化,其干擾較大,尤其是車燈和車標(biāo)志的干擾最大,而在HSV空間下進(jìn)行二值化能夠較好地排除這些干擾。
2.3 形態(tài)學(xué)處理
對(duì)于二值化后車牌圖像,利用形態(tài)學(xué)處理方法能快速有效地檢測(cè)到其中的連通區(qū)域,即車牌的候選區(qū)域。
形態(tài)學(xué)方法是數(shù)字圖像處理和模式識(shí)別領(lǐng)域應(yīng)用最為廣泛的技術(shù)之一。在數(shù)學(xué)上通過(guò)一些數(shù)學(xué)運(yùn)算,可以運(yùn)用形態(tài)學(xué)的操作來(lái)描述一些區(qū)域的外形、骨架等,也可以進(jìn)行預(yù)測(cè)和快速處理。形態(tài)學(xué)的基本運(yùn)算包括腐蝕、膨脹、開運(yùn)算和閉運(yùn)算等。開運(yùn)算和閉運(yùn)算都是由腐蝕和膨脹復(fù)合而成,開運(yùn)算是先腐蝕后膨脹,而閉運(yùn)算是先膨脹后腐蝕。
腐蝕(Erosion)運(yùn)算可定義為
A?B={x,B+x?A}
(4)
式中:A為輸入圖像;B為模板。A?B表示B在平移過(guò)程中,所有可能填入A內(nèi)部的B的原點(diǎn)。若將B看作結(jié)構(gòu)元素,則A?B表示將結(jié)構(gòu)元素平移x,但仍包含在輸入圖像內(nèi)的點(diǎn),腐蝕能夠收縮輸入圖像[4]。
膨脹(Dilation)運(yùn)算是腐蝕運(yùn)算的對(duì)偶運(yùn)算(逆運(yùn)算),可以通過(guò)對(duì)補(bǔ)集的腐蝕來(lái)定義
A⊕B=[AC?(-B)]C
(5)
其中,AC表示A的補(bǔ)集,-B表示將B旋轉(zhuǎn)180°。利用-B對(duì)AC進(jìn)行腐蝕,腐蝕結(jié)果的補(bǔ)集就是利用B對(duì)A腐蝕的結(jié)果。膨脹是利用結(jié)構(gòu)元素的補(bǔ)集對(duì)圖像進(jìn)行填充,因而它表示對(duì)圖像外部做濾波處理。而腐蝕則表示對(duì)圖像內(nèi)部做濾波處理[5]。
從而開運(yùn)算可定義為
A·B=(A?B)⊕B
(6)
閉運(yùn)算可定義為
A·B=[A⊕(-B)]?(-B)
(7)
閉運(yùn)算可以使輪廓變得光滑,它通常能夠彌合狹窄的間斷,填充小的孔洞。開運(yùn)算可以使圖像中的輪廓變得光滑,還能使狹窄的連接斷開和消除細(xì)毛刺[5]。
為了檢測(cè)到車牌候選區(qū)域,本文所采用的形態(tài)學(xué)處理方法是:先通過(guò)閉運(yùn)算來(lái)連接近鄰目標(biāo),然后再采用開運(yùn)算來(lái)消除細(xì)小的物體。
圖4是對(duì)圖3b進(jìn)行形態(tài)學(xué)處理的結(jié)果,其中圖4a是采用大小為20×6的結(jié)構(gòu)元素做閉運(yùn)算的結(jié)果,圖4b是采用大小為5×20的結(jié)構(gòu)元素做開運(yùn)算的結(jié)果,其中的連通區(qū)域即為車牌的候選區(qū)域。
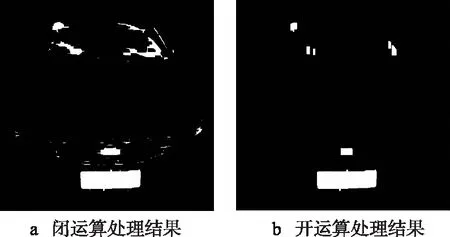
圖4 形態(tài)學(xué)處理結(jié)果
2.4 寬高比驗(yàn)證
將形態(tài)學(xué)處理檢測(cè)到的車牌候選區(qū)域顯示到原圖上,其邊緣用黃色線條標(biāo)出,如圖5a所示。不難看出車牌候選區(qū)域有多個(gè),其中非車牌區(qū)域可稱之為“偽車牌區(qū)域”。為了剔除偽車牌區(qū)域,實(shí)現(xiàn)車牌的最終準(zhǔn)確定位,可利用車牌的先驗(yàn)知識(shí)——寬高比對(duì)候選區(qū)域進(jìn)行驗(yàn)證,符合驗(yàn)證要求的即為真實(shí)的車牌區(qū)域。
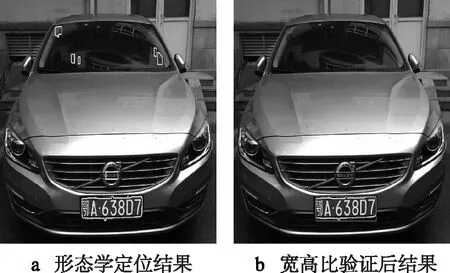
圖5 車牌定位結(jié)果
實(shí)際上,對(duì)于不同類型的車牌,其寬度和高度在我國(guó)交管部門是有規(guī)定的,從而可以利用寬高比值作為依據(jù)對(duì)圖像形態(tài)學(xué)處理得到的候選車牌區(qū)域的寬高比進(jìn)行驗(yàn)證,這樣可以不受原始圖像中車牌位置、大小(拍攝遠(yuǎn)近)的影響。
對(duì)于候選車牌區(qū)域,求其外接矩形,并計(jì)算寬高比r,設(shè)范圍容許參數(shù)為α,若(1-α)R≤r≤(1+α)R,則認(rèn)為該區(qū)域?qū)儆谲嚺茀^(qū)域,作為定位結(jié)果輸出,否則屬于偽車牌區(qū)域,予以剔除。
以藍(lán)底白字的小型汽車為例,按交管部門規(guī)定,其車牌寬度為440 mm,高度為140 mm,寬高比為R=3.14。設(shè)定α=0.1,對(duì)圖5a中的候選區(qū)域進(jìn)行驗(yàn)證,剔除偽車牌區(qū)域后,得到圖5b中紅色邊線標(biāo)定的區(qū)域,即為最終定位到的車牌區(qū)域。
3 方法實(shí)現(xiàn)及實(shí)驗(yàn)對(duì)比
在VS2010平臺(tái)上利用OpenCV庫(kù)和C++語(yǔ)言編程實(shí)現(xiàn)了本文提出的車牌定位方法,并和RGB空間下直接進(jìn)行形態(tài)學(xué)處理的定位算法做了對(duì)比。多組實(shí)驗(yàn)表明,本文提出的方法具有明顯優(yōu)勢(shì)。
下面給出其中兩組實(shí)驗(yàn)效果,如圖6和圖7所示。圖6為RGB空間下車牌定位結(jié)果,圖7為HSV空間下車牌定位結(jié)果。
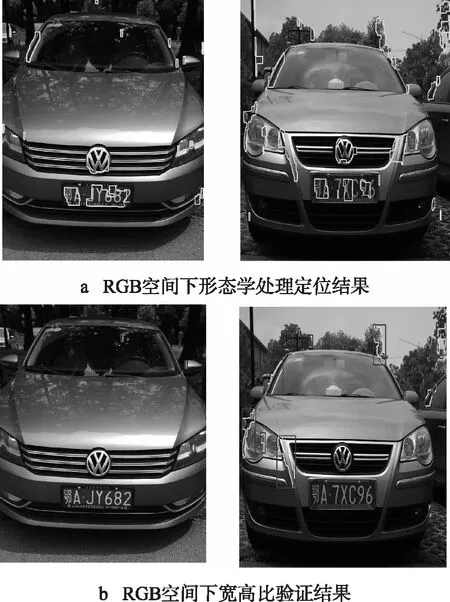
圖6 RGB空間下車牌定位結(jié)果
圖6a中黃線標(biāo)出的區(qū)域?yàn)镽GB空間中進(jìn)行形態(tài)學(xué)處理后檢測(cè)到的候選區(qū)域,可以看出候選區(qū)域較多,受背景干擾的影響較大;圖6b中紅線標(biāo)出的區(qū)域?yàn)椴捎脤捀弑闰?yàn)證后最終定位到的車牌區(qū)域,可以看出這兩組圖像的車牌定位失敗。
圖7a中黃線標(biāo)出的區(qū)域?yàn)镠SV空間中進(jìn)行形態(tài)學(xué)處理后檢測(cè)到的候選區(qū)域,可以看出候選區(qū)域較少,背景干擾的影響明顯減小;圖7b中紅線標(biāo)出的區(qū)域?yàn)椴捎脤捀弑闰?yàn)證后最終定位到的車牌區(qū)域,可以看出這兩組圖像的車牌定位準(zhǔn)確。

圖7 HSV空間下車牌定位結(jié)果
4 總結(jié)
本文針對(duì)傳統(tǒng)的圖像形態(tài)學(xué)處理方法在定位車牌時(shí)存在的局限性進(jìn)行改進(jìn),提出了一種基于HSV彩色空間和圖像形態(tài)學(xué)處理相結(jié)合的車牌定位方法。一方面,充分利用車牌的顏色信息,將原始RGB彩色圖像轉(zhuǎn)化為HSV彩色圖像進(jìn)行二值化處理,再進(jìn)行形態(tài)學(xué)處理,在很大程度上去除了背景干擾的影響;另一方面,對(duì)于形態(tài)學(xué)處理后檢測(cè)到的車牌候選區(qū)域,僅利用車牌先驗(yàn)知識(shí)——寬高比進(jìn)行驗(yàn)證,就實(shí)現(xiàn)了車牌區(qū)域的準(zhǔn)確快速定位,該方法不受車牌位置和大小的影響,實(shí)現(xiàn)簡(jiǎn)單,效率高。
[1]馬永慧, 薛丹丹.基于數(shù)學(xué)形態(tài)學(xué)和投影法的車牌定位方法[J].電視技術(shù), 2013, 37(7) : 147-149.
[2]李剛.基于數(shù)學(xué)形態(tài)學(xué)的車牌定位算法[J].儀器儀表學(xué)報(bào), 2007, 28(7): 1323-1326.
[3]張麗靜, 孫杰, 殷曉宇.基于HSV顏色空間的車牌定位方法[J].微計(jì)算機(jī)信息, 2008, 24(3): 246-247.
[4]狄紅衛(wèi), 許瑤.數(shù)學(xué)形態(tài)學(xué)在圖像濾波中的應(yīng)用[J].暨南大學(xué)學(xué)報(bào), 2003, 24(3): 42-45.
[5]張錚, 王艷平, 薛桂香.數(shù)字圖像處理與機(jī)器視覺(jué)——Visual C++與Matlab實(shí)現(xiàn)[M].北京:人民郵電出版社, 2010.
License Plate Location Method Based on Combination of HSV Space and Morphology Processing
MIAO Jiaojiao,XU Wangming
(CollegeofInformationScienceandEngineering,WuhanUniversityofScienceandTechnology,Wuhan430081,China)
License plate location is the premise to achieve automatic license plate recognition.In this paper, a license plate location method based on the combination of HSV color space and image morphology processing is proposed to improve the traditional method based on RGB color space and morphology.When converted to HSV color space, license plate image is splited into three single-channel gray scale images of H, S and V which are denoised and binarized respectively.To effectively removethe background interference,“And” operation is applied on these three binary images to generate a new binary image.Then the morphological methods such as the “Close” operation and “Open” operation are used to detect the candidate regions of license plate.Finally, the aspect ratio property of license plate is adopted to validate them to determine the true license plate locations.Experimental results show that the proposed method is easy to implement and more accurate and efficient to locate the license plate compared with the traditional one.
license plate location;HSV color space; morphology
湖北省大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計(jì)劃項(xiàng)目(201310488022);武漢科技大學(xué)大學(xué)生科技創(chuàng)新基金研究項(xiàng)目(12ZZC128)
TP391.4
A
10.16280/j.videoe.2015.05.035
2014-08-10
【本文獻(xiàn)信息】苗姣姣,徐望明.HSV空間和形態(tài)學(xué)處理相結(jié)合的車牌定位方法[J].電視技術(shù),2015,39(5).
苗姣姣(1990— ),女,主研信號(hào)與信息處理;
徐望明(1979— ),博士,高級(jí)工程師,主研圖像處理與計(jì)算機(jī)視覺(jué)。
責(zé)任編輯:薛 京
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52