基于圖像的換流站用避雷器儀表識別
2015-06-24 06:24:00崔家瑞紀建才胡廣大何紅太劉廣一
電工技術學報 2015年1期
崔家瑞 紀建才 胡廣大 何紅太 張 波 劉廣一
(1.北京科技大學自動化學院 北京 100083 2.北京國網富達科技發展有限責任公司 北京 100070 3.中國電力科學研究院 北京 100192)
1 引言
隨著電力需求的持續增長、傳統能源的短缺和電力市場的開放,尋求一種高效、靈活、智能和可持續的電網發展方式才能適應未來的技術需求。可持續性是未來電網的基礎特征,其本質表現為分布式能源(distributed energy resources,DER)尤其是可再生能源的規模化接入與應用[1]。可是DER 的大量接入將對配電網造成廣泛的影響,配電網的根本性變化使得某些繼電保護系統受到不同程度的影響。換流站用避雷器作為電力系統中重要的過電壓設備,同樣會受到分布式電源的影響[4],目前國內避雷器監測,用人工抄表記錄的方式,來監視避雷器泄漏電流的大小和變化趨勢,工作量大,且讀取繁瑣。因此為了確保這種新型的電網安全運行,對避雷器的動作次數和泄露電流進行監測就顯得尤為重要[5-7]。
目前,國內外對于類似避雷器的數字式動作次數儀表和指針式泄露電流表的識別系統進行了大量的研究,取得了一定的成果。對于數字式儀表,文獻[8]采用區域生長法定位字符塊,然后對分割出的單個數字圖像用豎線穿越3 次和橫線穿越6 次,分別統計兩個方向上的穿越次數作為數字特征。文獻[9]描述了近年來國外人臉識別、字符識別等的研究成果。文獻[10]運用模糊與混沌理論進行圖像處理與識別,對每個數字圖像提取一組特征,采用基于模糊識別的最大隸屬原則,構造分類器進行識別。對于指針式儀表,Correa Alegria 等在文獻[11]中詳細論述了基于機器視覺對指針式儀表的識別過程,但是這種算法很難保證兩幅圖像在同一個拍攝平面,會影響最終的指針讀數。國內較早的進行指針式儀表識別的是哈爾濱工業大學的李鐵橋教授對壓力表讀數識別的研究,他以刻度盤圓心為極點,儀表下限刻度為極軸按順時針方向建立極坐標系,用表盤粗刻度線及指針對應極角的大小確定指針所指示的壓力值[12]。文獻[13]提出了同心圓搜索法,此算法雖然簡單易行,但是識別精度比較低。這些方法存的缺點主要有:1)采集的圖像在進行預處理之前沒有圖像矯正的過程,造成識別精度降低。2)在進行儀表讀數識別時,存儲空間大、計算時間長,導致識別的實時性較差。3)穩定性和抗干擾能力較差。
基于換流站用避雷器儀表的特點,本文提出了一種以圖象處理為基礎的儀表識別算法來對避雷器動作次數和泄露電流進行識別,流程簡單、思路明確,克服了現有儀表識別方法的不足,并通過仿真實驗驗證了所提算法的正確性和有效性。
2 算法描述
2.1 圖像畸變矯正
實際應用中,由于換流站用避雷器儀表的安裝位置特殊性,導致采集到的圖像發生幾何失真,目標像素點的坐標發生變化,如使矩形變成梯形、平行四邊形等。本文用透視變換[14]對失真圖像進行矯正,選取的輔助矩形是避雷器儀表矩形表盤,由儀表矩形表盤頂點這四個特征點可以算出矯正后得到的新矩形的長度和寬度,從而求出正視圖中對應于四個特征點的坐標,通過透視變換原理得到避雷器儀表的矯正圖。設原圖像是平面I′ 上的四邊形A′B′C′D′,發生畸變后的圖像位于平面I 上的四邊形ABCD,則透視畸變過程如圖1所示。

圖1 透視畸變原理圖Fig.1 Perspective distortion principle diagram
2.2 圖像預處理
圖像預處理是對避雷器儀表圖像進行識別前的必要技術之一,目的就是把原本不清晰的圖像變得清晰,或者抑制圖像的某些特征而使另外一些特征得到增強,使處理后的圖像質量得到改善,增加圖像的信噪比,或者增強圖像的視覺效果。
通過圖像灰度化、中值濾波、直方圖均衡化、基于最大類間方差法的二值化、數學形態學處理對圖像進行增強處理,使圖像的對比度增強,以便提取出要識別的目標部分。
2.3 數字式動作次數表的識別
完成避雷器動作次數儀表圖像的增強與粗定位后,為了進行下一步的識別,采用垂直投影法[15]對字符進行分割。垂直投影法是按照行列像素的統計特性分割的一種方法,實質就是把圖像的像素分布特性簡化為X軸和Y軸的兩個一維函數,通過對這兩個函數的分析找到每個數字的邊緣,記錄其坐標。
在進行識別的算法設計時,考慮到傳統的數字識別方法的復雜性和局限性和神經網絡識別速快、準確度高,所以采用改進的BP 神經網絡法進行字符識別如圖2所示。BP 神經網絡是一種有導師的學 習方法,在輸入了M個樣本后,輸出結果為y0,y1,…,yp,并且和對應的導師t0,t1,…,tp通過來判斷實際輸出與要求輸出之間的 誤差來改變神經網絡的連接權值和節點閾值。
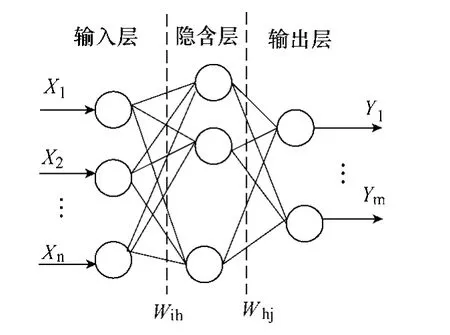
圖2 改進的BP 神經網絡結構圖Fig.2 BP neural network structure improvement
本文設計了一個改進的BP 神經網絡分類器來對樣本進行訓練。在調整加權系數時,取輸出誤差二次方為性能目標函數,利用速度下降法修正神經網絡加權系數,即根據目標函數對加權系數負梯度方向搜索。為了避免網絡學習陷入局部最小,引入了運動項,即

式中,wij是權系數,α是動量因子,μ是學習步長,k為訓練次數。使用運動項后,不但可以在維持算法穩定的情況下使用更高的學習速率;而且當誤差軌跡進入某一一致方向后,可以加速收斂。
2.4 指針式泄漏電流表的識別
在對避雷器指針儀表進行指針提取時,采用的是圖像減影法,該方法需要輸入兩幅不同的讀數的儀表的二值圖像,假設這兩幅圖像是M(x,y)、N(x,y),兩幅圖像的差值圖像P(x,y)反映的是兩幅圖像的兩個指針,由P(x,y)和M(x,y)做邏輯與運算可以提取出N(x,y)的指針,同理,P(x,y)和N(x,y)做邏輯與運算可以提取出M(x,y)的指針。
考慮到Hough 變換提取直線時受直線中的間隙和噪聲影響較小,具有很好的容錯性和魯棒性[16]所以采用Hough 變換提取指針直線。Hough 直線檢測的原理:對圖像的所有每個有效像素點(x,y)按式(2)進行某種形式的坐標變換,標記所有可能經過它的直線信息(用(ρ,θ)信息對),標記完成以后,在(ρ,θ)信息空間查看標記結果,再找出峰點累加數最大值(ρ,θ),此時的ρ為從坐標原點到直線的距離,θ為直線與x軸正向的夾角,就可以確定指針所在的直線y=kx+b。

本文在標準Hough 變換的基礎上,根據避雷器泄漏電流儀表的特點,從以下兩個方面進行了改進:
1)對參數θ的遍歷區間進行了約束,本文只對一定角度和一定區域的像素進行累加器計數。
2)Hough 變換的θ取值范圍[?90°,90°],將僅含指針邊緣的圖像進行順時針旋轉90°,使得指針旋轉范圍是[?90°,90°]的子區間,保證了進行Hough 變換時θ取值的連續性。設指針儀表的相對于水平方向x軸負方向偏轉角度是β,則
在讀數的識別過程中,為了減少讀數的誤差,采用如下的角度法進行讀數計算。設刻度hi對應的角度為θi,hi+1對應的角度為θi+1,儀表的讀數為T,由于指針指向的位置不同,進行儀表讀數分為以下兩種情況。
若指針在兩個刻度hi和hi+1之間,指針所對應的角度為β(θI<β<θi+1),則


整個算法的流程圖如圖3所。
3 實驗結果及分析
為了驗證算法的正確性和可行性,以換流站用避雷器儀表為例進行實驗。對于采集到的畸變圖像,選取矩形表盤的四個頂點作為特征點,矯正后的避雷器儀表如圖4、5 所示,避雷器泄動作次數表和泄露電流表已成為正視圖。

圖4 避雷器動作次數表原圖及矯正圖Fig.4 Lightning arrester action frequency instrument artwork and image correction

圖5 避雷器泄漏電流表原圖及矯正圖Fig.5 Lightning arrester leakage current meter and image correction
3.1 數字式動作次數表識別結果及分析
完成圖像增強與粗定位后,再將數字區域分成單個字符,可采用垂直投影法。因為字符部分是白色,其他部分是黑色,這里使用垂直投影法逐個統計每行每列中所包含的白色像素的數量,在各個字符的間隙處的白色像素很少,甚至為0。所以可以先由行垂直投影切割掉沒有白色像素的多余部分,得到字符的高度,再由列垂直投影切掉字符間列像素點累計為0 的部分,得到每個字符的寬度,最后得到的分割,結果如圖6所示。

圖6 字符切割結果Fig.6 Character segmentation results
神經網絡訓練過程中,要有足夠的模板,建立輸入量和輸出量,輸入量是每一個字符樣本,輸出量是這個樣本所對應的數據輸出。然后,開始建立訓練網絡,設置好一些參數,當滿足訓練次數和訓練精度任意一個時,就可以停止訓練,這時網絡訓練成功。BP 神經網絡的參數設置和訓練時間如表1所示。加載訓練好的BP 神經網絡,輸入待識別的字符,試驗結果表明:此分類器的構建是很有效的,能很快的識別標準的數字,正確的識別出了避雷器的動作次數1773。

表1 BP 神經網絡的參數設置和訓練時間Tab.1 Parameter setting and the training time of BP neural networks
分析表2,此分類器對于結構特征較明顯的識別效果比較好,如數字2、5、7,識別率接近100%。而對于數字0、6、9 這三個數字識別較差,因為這三個數字在結構上相似。算法的識別率不能達到100%是因為在實際應用中,識別系統的識別率與儀表圖片質量和圖像拍攝質量密切相關,還會受到各種因素影響。識別錯誤情況:一是一些儀表上的數字存在嚴重的干擾(如褪色、污染);二是部分字符的形狀相似性。

表2 換流站不同數字儀表的識別結果統計Tab.2 Different digital instrument recognition result statistics in converter station
3.2 指針式泄露電流表識別結果及分析
由于避雷器泄漏電流儀表上除了指針以外,還含有很多復雜的干擾信息,很難提取出感興趣的指針信息,采用減影法將采集到的儀表圖像和指針指向零刻度線的圖像進行相減,可以較好的提取出兩條指針信息,再將其與指針指向零刻度線的儀表二值化圖像取與運算得到待識別的一條指針信息,經過數學形態學膨脹、腐蝕操作,得到圖7。

圖7 減影法定位指針Fig.7 Position the pointer base on subtraction method
利用改進Hough 變換并運用角度法進行儀表讀數確定之前,需要根據表盤實際情況建立角度與讀數之間的對用關系(如表3),由表3 知,θ的取值范圍是[?53°,67°],從而設置角度雙閾值來減少要計算的像素點,進行Hough 變換后得知θ=51°,所以避雷器泄漏電流大小為0.8。

表3 角度與讀數之間的對應關系Tab.3 The corresponding relationship between the angle and reading

圖8 檢測結果Fig.8 Detection result
為了體現改進Hough 變換較傳統Hough 變換算法的有效性,從檢測速度和識別精度上驗證了它的識別效率。

表4 算法速度對比Tab.4 The speed comparison of the algorithm
由表4 看出,改進的Hough 變換直線檢測算法,在直線檢測環節比改進前節省了27.17%,整個儀表讀數識別時間也縮短了10.55%。
儀表的讀數與指針角度具有直接對應關系,以角度作為檢測結果能夠客觀反映算法的精確度。從表5 可知,改進前后算法得出的讀數誤差基本相同,且相對誤差在1%以下。

表5 算法精度比較Tab.5 The accuracy comparison of the algorithm
由表4、表5 可知,改進的Hough 變換算法不但保證了識別精度,而且提高了識別效率。
4 結論
本論提出了一種基于圖像的避雷器儀表的識別算法,克服了現有識別方法的缺點,體現出了此算法優越性和創新之處。
1)本文提出了基于透視變換的圖像矯正技術將透視畸變圖矯正為標準的正視圖提高了儀表識別的準確性。
2)采用改進的BP 神經網絡,在保持算法穩定的情況下,可以讓學習速率隨著誤差變化量的大小和趨勢而更新,從而提高收斂速度,不僅不受噪聲和字體大小的影響,而且速度快。
3)改進的雙閾值Hough 變換的識讀方法在保證了識別精度的前提下,大大地縮減了識讀所用時間,實時性顯著提高。
本文所討論的算法簡單、實用、執行速度快,有利于實際應用中的實時化要求。通過對換流站儀表的實時監測,不但可以確保電網的正常運行,還解決了人工讀數的復雜性,適應了新的電網發展方式。由于提取指針時受光照影響較大,目前該算法還不是很理想,但是這種儀表的識讀方法很好的滿足了實時性和準確性的要求。
[1]Djapic P,Ramsay C,Pudjianto D,et al.Taking an active approach[J].IEEE Power and Eenergy Magazine,2007,5(4):68-77.
[2]Walling R,Saint R,Dugan R C,et al.Summary of distributed resources impact on power delivery systems[J].IEEE Trans on Power Delivery,2008,23(3):35-68.
[3]Bommareddy C,Makram E,Power quality studies in the presence of DG[C]// Proceedings of the power systema Conference:Advanced metering,Ptotection,Control,Communication and Distributed Resource(PS’06),March 14-17,2006,Clemson,SC,USA:224-229.
[4]韋鋼,吳偉力,胡丹云.分布式電源及其并網時對電網的影響[J].高電壓技術,2007,33(1):36-40.
Wei Gang,Wu Weili,Hu Danyun.Distributed generation and its impact on the power grid[J].High Voltage Engineering,2007,33(1):36-40.
[5]沈祥,祝項英,金乃正.無人值班變電站遠方監控系統的設計和應用[J].電力系統自動化,2004,28(2):89-90.
Shen Xian,Zhu Xiangying,JinNaizheng.Design and application of control and watch systems for keeping watch self-service substation[J].Automation of Electric Power Systems,2004,28(2):89-90.
[6]谷定燮,周沛洪,修木洪,等.交流1 000 kV 輸電系統過電壓和絕緣配合研究[J]. 高電壓技術,2006,32(12):1-6.
Gu Dingxie,Zhou Peihong,Xin Muhong,et al.1 000 kV AC transmission system study on overvoltage and insulation coordination[J].High Voltage Engineering,2006:32(12):1-6.
[7]魯守銀,錢慶林,張斌,等.變電站設備巡檢機器人的研制[J].電力系統自動化,2006,30(13):94-98.
Lu Shouyin,Qian Qinglin,Zhang Bin,et al.Deve- lopment of a mobile robot for substation equipment inspection[J].Automation of Electric Power Systems,2006:30(13):94-98.
[8]申小陽,唐鐵峻,姜柏軍,等.儀表的數字字符識系統[J].儀表技術與傳感器,2005:55-77.
Shen Xiaoyang,Tang Tiejun,Jiang Baijun,et al.The instrument digital character recognition system[J].Instrument Technique And Sensor,005:55-77.
[9]Kim J Y,Kim L S.An advanced contrast-enhanc ement using partiallyoverlapped sub-block histog ram equalization[J].IEEE Trans Circuits and Video Tech- nology,2001,11(4):475-484.
[10]李士林,尹成群,尚秋峰,等.基于圖像識別理論的混沌特性判別方法[J].中國電機工程學報,2003,23(10):47-50.
Li Shilin,Yin Chengqun,Shang Qiufeng et al.A method of identifying chaotic nature based on image recognition[J].Proceedings of the CSEE,2003,23(10):47-50.
[11]F.Correa Alegria,A.Cruzz Serra.Automatic calibra- tion Anderson of analog and digital measuring instru- ments using computer vision[J].IEEE Transaction on Instrumentation and Measurement,2000,49(1):94- 99.
[12]張宏,李鐵橋.指針式壓力表全自動檢定系統的研制[J].儀器儀表學報,1999,20(4):345-347.
Zhang Hong,Li Tieqiao.Development of pointer type pressure meter automatic verification system[J].Chinese Journal of Scientific Instrument,1999,20(4):345-347.
[13]孫鳳杰,郭鳳順,范杰清,等.基于圖像處理技術的表盤指針角度識別研究[J].中國電機工程學報,2005(16):73-78.
Sun Fengjie,Guo Fengshun,Fan Jieqing,et al.Study on the ial pointer angle recognition based on image processing technology[J].China Journal of Electrical Engineering,2005(16):73-78.
[14]段汝嬌,趙偉,黃松嶺,等.一種基于改進 Hough變換的直線快速檢測算法[J].儀器儀表學報,2010,31(12):2774-2780.
Duan Rujiao,Zhao Wei,Huang Songling,et al.Fast inedetection algorithm based on improved Houg htrans formation[J].Chinese Journal of Scientific Instrument,2010,31(12):2774-2780.
[15]李小平,曲大成,任江興,等.車輛牌照識別系統可靠性問題的研究[J].北京理工大學學報,2001,21(1):11-14.
Li Xiaoping,Qu Dacheng,Ren Jiang Xing,et al.Study on the reliability of vehicle license plate recognition system[J].Journal of Beijing Institute of Technology,2001,21(1):11-14.
[16]黃穎怡,汪仁煌,岳利軍.機器視覺儀表識別方法的研究進展[J].自動化儀表,2009,30(8):58-60.
Huang Yingyi,Wang Renhuang,Yue Lijun.Research progress of machine vision instrument recognition[J].AutomationInstrumentation,2009,30(8):58-60.