一種零電壓保持開通的開關磁阻電機再生制動控制策略
2015-06-27 05:51:01甘醇吳建華王寧楊仕友
電機與控制學報 2015年9期
關鍵詞:控制策略
甘醇, 吳建華, 王寧, 楊仕友
(1.浙江大學電氣工程學院,浙江杭州310027;2.國網浙江省電力公司檢修分公司,浙江杭州310027)
一種零電壓保持開通的開關磁阻電機再生制動控制策略
甘醇1, 吳建華1, 王寧2, 楊仕友1
(1.浙江大學電氣工程學院,浙江杭州310027;2.國網浙江省電力公司檢修分公司,浙江杭州310027)
為了減小開關磁阻電機(switched reluctancemotor,SRM)再生制動運行時能量回饋對母線電壓的沖擊,對SRM再生制動過程進行分析,研究了再生制動能量對母線電壓造成的影響,提出一種零電壓保持開通的三步制動控制策略。以一臺三相開關磁阻電機為應用對象,闡述了所提方法的工作原理和實施辦法。研究結果表明該方法既可以產生必要的制動轉矩,又能降低再生制動過程中的能量回饋對母線電壓所造成的沖擊,提高制動過程的可靠性和安全性。仿真與實驗驗證了該方法的有效性和實用性。
開關磁阻電機;直流母線電壓;再生制動;零電壓保持開通;可靠性
0 引 言
開關磁阻電機(switched reluctance motor,SRM)調速系統是一種新型的機電一體化產品,融合了電機學、電力電子、控制理論等眾多學科領域[1]。由于其具有高效率、高可靠性、結構簡單和低成本等優點,得到了快速發展。開關磁阻電機具有較好的起動性能,寬廣的調速范圍,以及其易于實現四象限運行,所以適合應用于各種電力傳動系統。近年來,國內外對SRM系統效率、轉矩波動、故障診斷與無位置傳感器控制等方面進行了深人研究[2-5],但在制動控制策略及制動可靠性方面研究較少。
電機常用的制動控制策略主要有慣性自由制動、摩擦制動、反接制動和再生制動[6]。慣性自由制動是通過關閉系統所有控制信號,讓電機依靠慣性自由停車,這種制動方式時間較長,一般無法滿足制動要求;摩擦制動屬于機械制動,是通過機械摩擦將動能轉化成熱量消耗掉從而達到制動停車的目的,這種方法可靠性較低,而且對機械設備損害較大,一般用于低成本裝置或者性能要求較低的場合。反接制動和再生制動都屬于電力制動,反接制動是通過改變電機定子繞組的通電順序,使其有反轉趨勢,從而產生較大的制動力矩,而電機仍工作在電動模式下,這種方法準確性較差,制動過程沖擊力強烈,易損壞傳動部件,容易造成電機反轉;再生制動是在電機制動過程中,通過改變控制策略讓電機工作在發電模式下,將動能轉化為電能回饋母線,同時制動電流產生制動轉矩,再生制動能量利用率高,控制參數多,是一種有效的制動停車控制方法,該方法特別適合于電池供電的驅動系統[7-11],例如電動汽車驅動系統,可以增加電池的續航能力。SRM可以通過改變開通角和關斷角直接實現電動模式和再生制動模式的自由切換,而且不需要額外增加硬件,所以對SRM驅動系統的制動控制策略進行研究具有重要意義。
文獻[12-13]研究了永磁同步電機和無刷直流電機驅動系統的優化制動控制策略,改善了系統制動的可靠性,提高了能量回收利用率。文獻[14]對轉子磁場定向控制的永磁同步電機制動過程進行研究,分析了電機制動時能量的回饋和直流側母線電壓的變化,以及直流母線電壓變化對系統的影響,但并未提出有效的母線電壓泵升抑制方法。文獻[15]提出一種通過改變逆變器開關管的開通序列抑制永磁同步電機系統母線電壓泵升的控制方法。文獻[16-17]通過在SRM的功率變換器前端加人直流變換環節,改善電機再生制動狀態下的電流和速度的動態響應,文獻[18-21]對SRM再生制動過程中的電流、轉矩和能量轉化進行相關分析,通過對SRM的開通角、關斷角等參數進行優化控制,對電機的再生制動系統進行設計,但以上文中沒有討論再生能量回饋對母線電壓泵升和過電流的影響與抑制方法。文獻[22]研究了SRM再生制動能量和母線電壓之間的關系,提出將再生制動能量消耗在相鄰相繞組上的方法,從而降低對母線電壓的沖擊。但是該方法在制動過程中通過導通另一相繞組消耗能量,導通相會產生電動轉矩,影響制動性能,而對于電池供電的系統,此方法的能量利用率較低。文獻[23]對SRM電動模式下的零電壓換相控制進行研究,分析了零電壓換相過程對速度、轉矩以及效率的影響,并與傳統的控制方式進行比較,說明了零電壓換相控制可以改善電流波形,提高系統效率,但并未對再生制動過程進行分析。
SRM工作在傳統再生制動模式下,再生制動能量回饋會造成直流母線電壓泵升,同時較大的充電電流可能會損壞母線電容以及電力電子器件。本文提出一種零電壓保持開通的三步制動控制策略,采用全電壓開通、零電壓保持開通和全電壓關斷的三步方式,解決了提前關斷時反電動勢較小使制動電流快速下降而帶來的制動轉矩不足的問題,三步制動控制策略既能產生必要的制動轉矩,又可以減小再生制動階段的過電壓和過電流對直流母線和電力電子器件造成的沖擊,將母線電壓降到安全電壓內,對于電動汽車驅動系統,制動過程中產生的能量還可以對蓄電池進行充電,提高電動車的續航旅程。仿真和實驗驗證了方法的有效性。
1 SRM驅動系統
三相12/8極SRM的結構如圖1(a)所示。圖中繞組A1、A2、A3、A4串聯構成A相繞組,βs、βr為定、轉子極弧角。轉子槽中心線與定子極中心線重合的位置為轉子不對齊位置,定義為開通角的參考零點;轉子極中心線與定子極中心線重合位置為轉子對齊位置,參見圖1(a)標示。電動運行時通常選擇各相的開通角在轉子不對齊位置附近,關斷角在轉子對齊位置之前。在SRM驅動系統中,功率變換器對SRM的可靠運行至關重要,不對稱半橋型功率變換器控制方式靈活,具有較好的容錯性能,其三相主電路結構如圖1(b)所示。
為減小轉矩脈動,降低開關損耗,提高系統效率,常用的控制策略為:A相導通階段,下管S2保持開通,上管S1實行斬波控制,電源向繞組供電;A相關斷階段,S1、S2均關斷,繞組通過續流二極管D1和D2實現負電壓續流,能量快速回饋電源。電機運行采用單雙相混合激勵(A-AB-B-BC-CCA)的開通方式。不對稱半橋型功率變換器每個橋臂使用兩個功率開關管,各相之間相互獨立,容錯性能好,穩定性強。
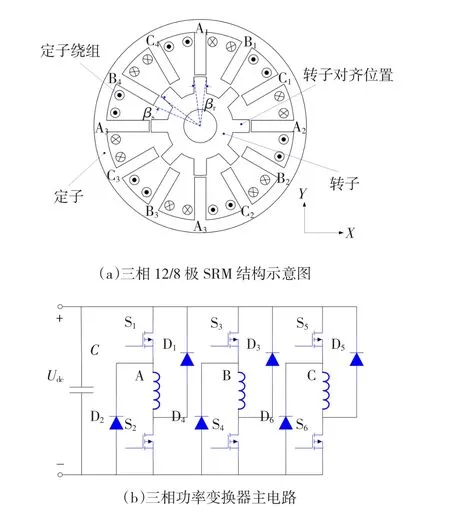
圖1 SRM與功率變換器結構Fig.1 Structures of SRM and power converter
圖2 為SRM系統控制框圖和能量流動狀態。電動階段電機從母線吸收電能轉化為機械能,再生制動階段電機將機械能轉化成電能回饋給母線,通過控制功率變換器,能量可以實現雙向傳輸。圖3為不對稱半橋型功率變換器的3種工作模式,圖3(a)上、下管同時開通,為正電壓導通階段,圖3(b)上管關斷,下管開通,為零電壓續流階段,圖3(c)上、下管同時關斷,為負電壓續流階段,即能量回饋階段。
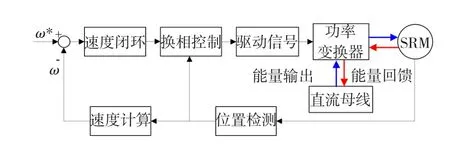
圖2 SRM系統的控制框圖及能量流動狀態Fig.2 Control block diagram and the energy flow states of SRM system
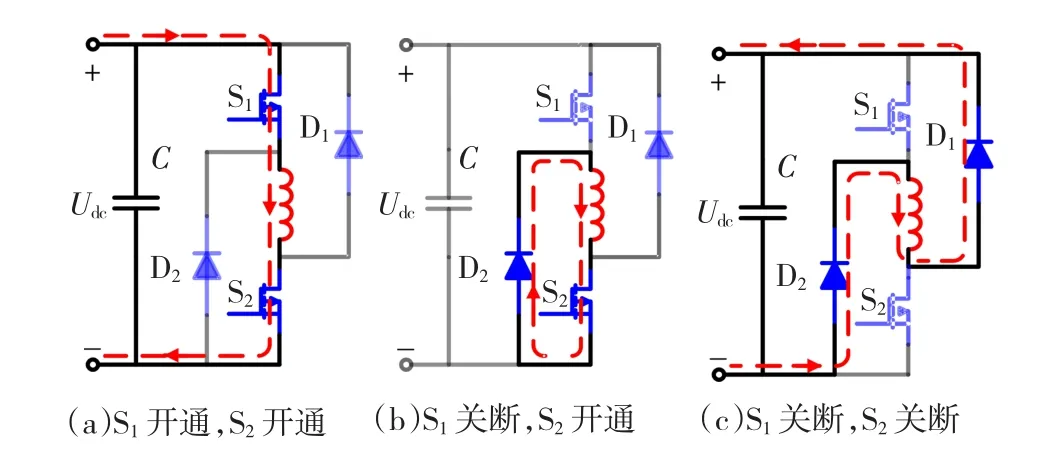
圖3 功率變換器的3種工作模式Fig.3 Three operation modes of power converter
2 SRM的再生制動分析
2.1 再生制動過程與母線電壓泵升
開關磁阻電機的電壓平衡方程為

式中:U為相電壓,其正負的取值由電機工況決定,導通階段為正,能量回饋階段為負;R為相繞組電阻;L為相繞組電感;i為相電流;ω為電機轉子角速度;θ為轉子角位置。式(1)右邊第一項為繞組電阻壓降,第二項為電流變化產生的感應電動勢,第三項為轉子位置變化產生的反電動勢。
繞組電感隨轉子位置角的變化呈非線性變化,電機一相的電磁轉矩方程為

在電感上升區間內(d L/dθ>0),產生正向電磁轉矩(Te>0),在電感下降區間內(d L/dθ<0),產生反向的制動轉矩(Te<0)。
電機轉子的機械運動方程為

式中:Tl為負載轉矩;J為轉動慣量;B為阻尼系數。由式(1)~式(3)可以得到電機的轉子角速度ω。
圖4為再生制動階段的電流和電感關系曲線。圖中,θon、θoff分別為電機的開通角和關斷角,K1K2區間為電流勵磁階段,系統從母線端吸收電能和輸出機械能,轉化為繞組儲能,K2K5或K2K3K4區間為能量回饋階段,產生制動轉矩并回饋母線電能。在電感下降區間,同時開通上、下管將使電機進人發電狀態,當制動電流建立后,同時關斷上、下管,產生制動轉矩,能量同時回饋直流母線。
忽略繞組電阻壓降的影響,根據式(1),發電制動階段能量回饋電源,U取負值,其電壓平衡方程可以改寫為電流斜率的形式為

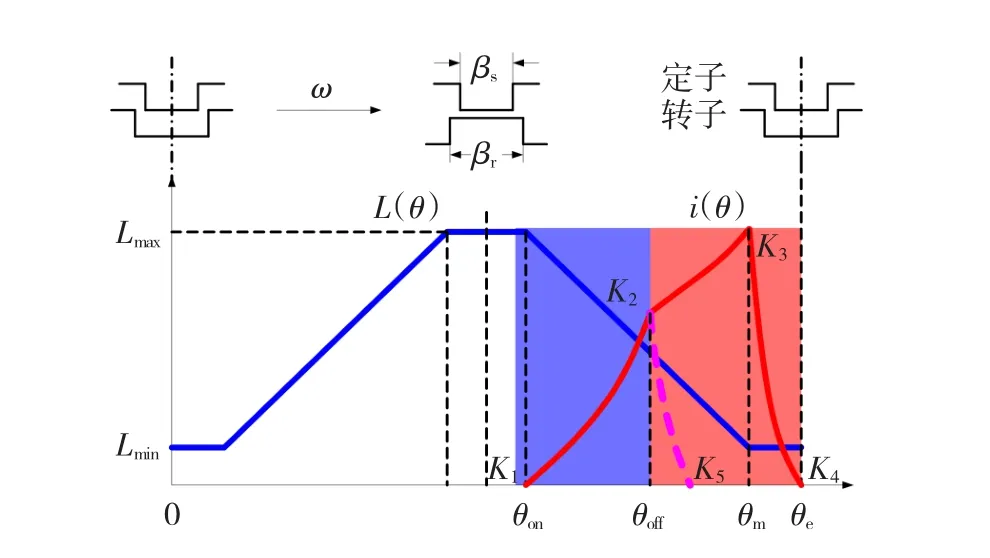
圖4 再生制動模式下的相電流和相電感關系Fig.4 Relationship between phase inductance and phase current in regenerative braking mode
在開通角θon到關斷角θoff區間內,機械能轉化為磁場儲能,轉子位置到達關斷角度時,勵磁電流K1K2已經建立,關斷繞組后,系統向母線充電。當電機運行于額定轉速之下的中低速狀態時,若反電動勢比相電壓小,則

此時,d i/d t<0,制動電流將沿著K2K5軌跡快速下降。
當電機運行于額定轉速之上的高速狀態時,若反電動勢比相電壓大,則

此時,d i/d t>0,制動電流先沿著K2K3軌跡上升,之后再沿著K3K4軌跡下降。轉子位置到達θm時的電流峰值為

式中Lmin為相繞組電感的最小值。
由此可見,轉速的高低決定了反電動勢的大小,而反電動勢的大小直接影響到[θoff,θm]區間內的制動電流。
式中Lmax為相繞組電感的最大值。
由一相電流充電造成的母線電容兩端的電壓增量為

則三相電流共同充電造成的母線電容兩端的電壓增量為

2.2 零電壓保持開通三步制動控制策略
進人發電區域時,制動電流的大小反映了制動的強度,也反映了儲存磁場能量的大小,通過對制動電流進行控制,可以實現對發電過程的控制。
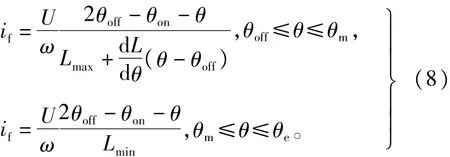
如果外加電源電壓和電機轉速均為常數,則電流波形與開通角、關斷角和電機結構參數有關。對于傳統制動方式,若電機反電動勢小于換向電壓,當繞組在θoff1位置提前關斷時,制動電流過早下降,如圖5(a)中i1(θ),系統將無法產生足夠的制動轉矩;當繞組在θoff2位置正常關斷時,制動電流將會很大,如圖5(b)中i2(θ),對母線電容和電子器件造成過電流和過電壓沖擊,影響系統可靠性。
本文提出一種零電壓保持開通的三步制動控制策略,第一步,在電感下降區間內同時開通上下管,使電流上升;第二步,在開通區間內θoff1位置將上管關斷,同時下管保持開通,此時繞組外加電壓為零,無論反電動勢為多大,其必然大于繞組電壓,由式(4)、式(6)可知電流將保持上升,這樣可以將充電電流保持在一定幅值內,同時產生有效的制動轉矩,解決了提前關斷后反電動勢較小造成的轉矩不足問題,并避免了產生過大的制動電流;第三步,當轉子位置到達θoff2時,關斷下管,能量回饋電源。三步制動的電流如圖5中i(θ)所示。圖6為全周期導通制動和零電壓保持制動時的A相驅動信號與對應相電感示意圖。轉子位置θoff1到θoff2區間內為下管保持開通階段,其中一部分能量消耗在激勵相繞組上,一部分能量轉化為磁場儲能,可以增大發電制動狀態的有效電流面積,同時又可以減小過大的充電電流對變換器造成的損害。
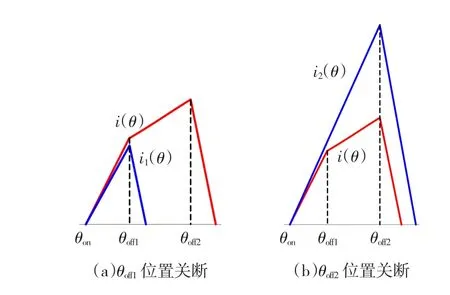
圖5 不同的角度控制策略對制動電流的影響Fig.5 In fluence of different angle control strategies to braking current
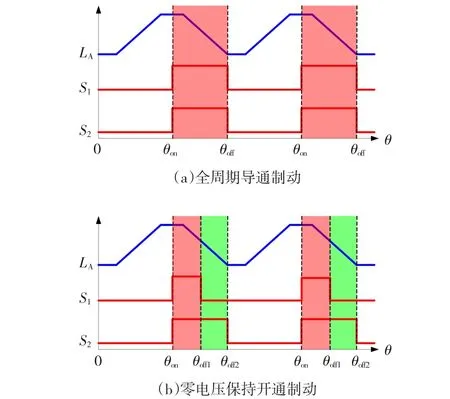
圖6 驅動信號與相電感的對應關系Fig.6 Relationship between driving signals and phase inductance
3 仿真結果
仿真模型采用的實驗樣機主要參數如表1所示。SRM控制系統的非線性仿真模型利用Matlab/ SIMULINK建立,電機本體部分的磁鏈與轉矩計算模塊參數采用實驗樣機的Ansoft有限元分析數據導人。功率變換器部分直接采用SimPowerSystems模塊搭建,驅動部分采用脈寬調制信號配合邏輯輸出實現。
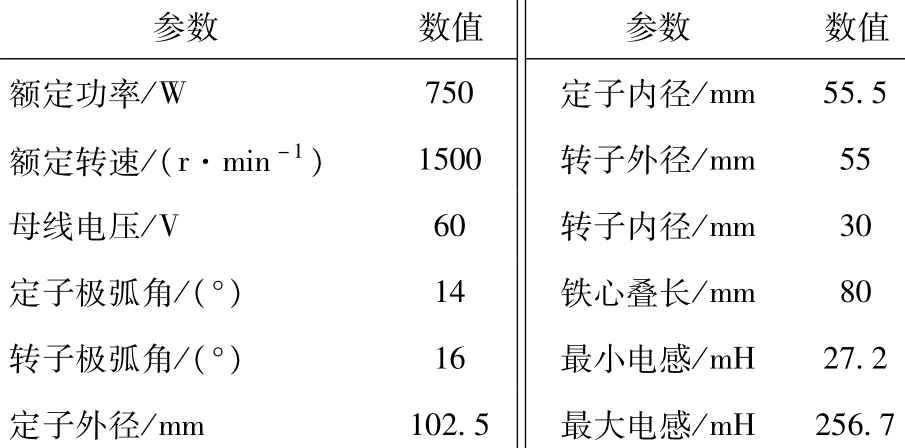
表1 樣機參數Table 1 M otor parameters
圖7、圖8分別為額定1 500 r/min恒轉速運行時,全周期導通和零電壓保持開通兩種制動控制策略下的A相相電流ia、相轉矩Ta、A相開關管驅動信號S1和S2、充電電壓ΔUdc以及充電電流if的仿真波形。圖7中的開通角θon為22°,關斷角θoff為42°,圖8中的開通角和關斷角與圖7中的相同,其中零電壓保持階段的零電壓導通初始角θoff1為30°,零電壓關斷角θoff2為42°。
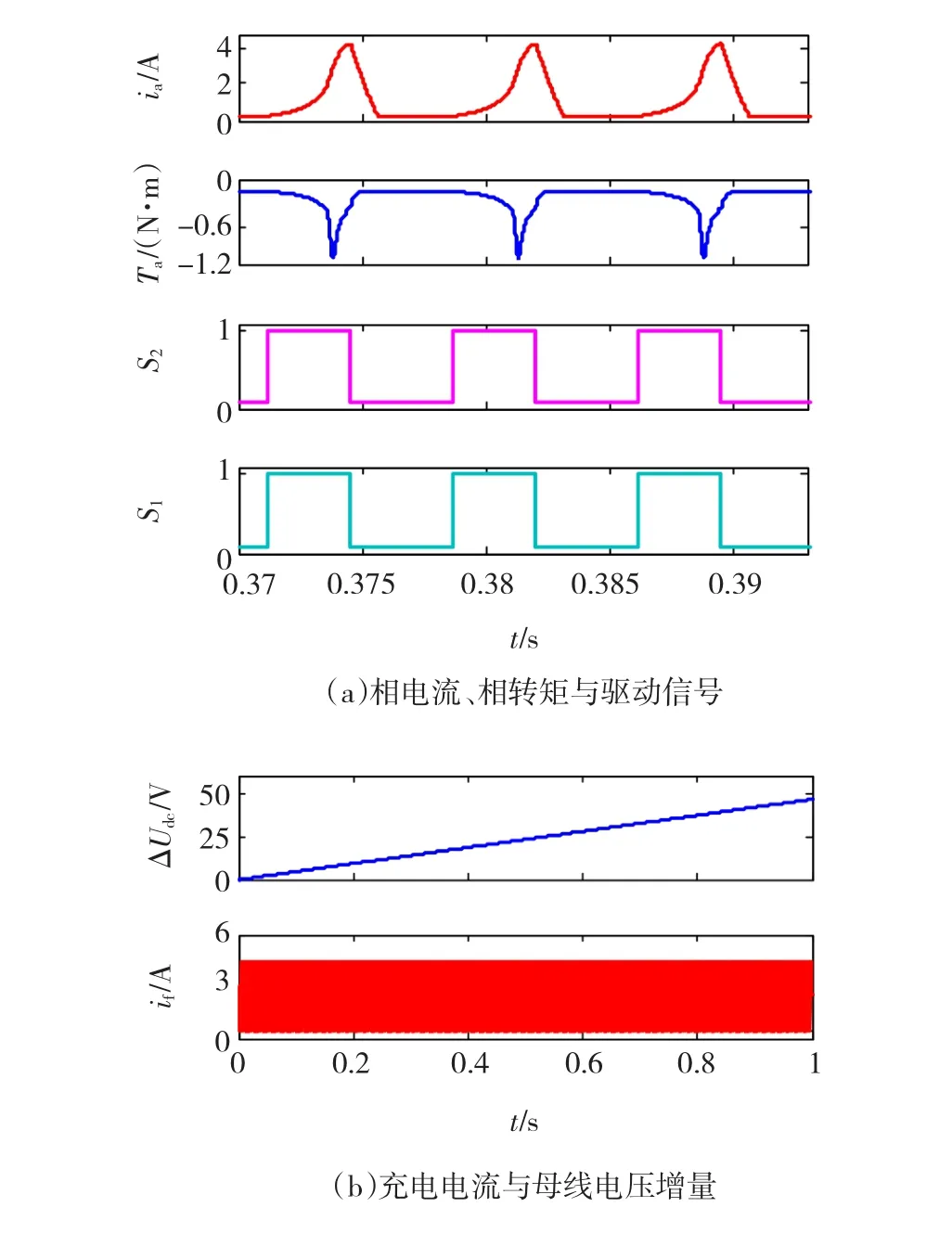
圖7 全周期導通制動Fig.7 Full-cycle conduction braking

圖8 零電壓保持開通制動Fig.8 Zero-voltage loop hold braking
當采用全周期導通的控制方法時,勵磁電流的峰值很大,雖然產生的制動轉矩較大,但是繞組關斷后,較大的充電電流回饋母線,引起母線電壓泵升,如圖7(b)所示。在相繞組開通區間內,若采用零電壓保持開通的控制方法,無論電機轉速高低,在下管保持開通的區間內電流將繼續上升,不受反電動勢較小的影響,仍然可以產生有效的制動轉矩,而充電電流幅值相對于全角度開通時會明顯降低,母線電壓增量也會相應降低,如圖8(b)所示,可以起到保護母線電容和功率開關器件的目的。
4 實驗結果
實驗樣機參數見表1,采用不對稱半橋型功率變換器驅動,母線電容4 000μF,負載轉矩0.83 N·m。控制方式采用斬波調壓控制,并以模糊PI控制算法構成轉速閉環系統。主控芯片采用DSP TMS320F28335并配以高速邏輯電路,實驗平臺如圖9所示。

圖9 實驗平臺Fig.9 Experimental p latform
圖10 為不同制動控制策略下的母線電壓與對應的A相電流和轉速波形。圖11為不同制動控制策略下的A相電流及對應的驅動信號。系統由額定轉速1 500 r/min斷電后慣性自由制動的時間較長,所需時間2.3 s,如圖10(a)。當采用全周期導通控制的再生制動控制策略時,開通角θon為22°,關斷角θoff2為42°,雖然制動時間0.22 s較短,但是母線電壓飆升至101 V,嚴重超過了正常工作電壓60 V,而且制動電流上升較快,很容易造成系統過電流,其最大峰值也增大到正常電流的7.5倍左右,如圖10(b)和圖11(a),過電壓和過電流很容易造成母線電容和電力電子器件損壞。當采用提前關斷的制動方式時,開通角θon為22°,關斷角θoff提前至30°,雖然母線電壓上升不明顯,但是制動時間為1.6 s,制動電流較小不足以產生足夠的制動轉矩,影響制動性能,最大制動電流峰值為正常電流的4.3倍,如圖10(c)和圖11(b)。
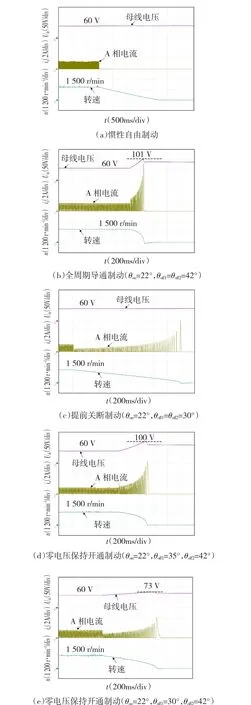
圖10 母線電壓、相電流與轉速實驗波形Fig.10 Experimental waveforms of DC bus voltage,phase current and speed
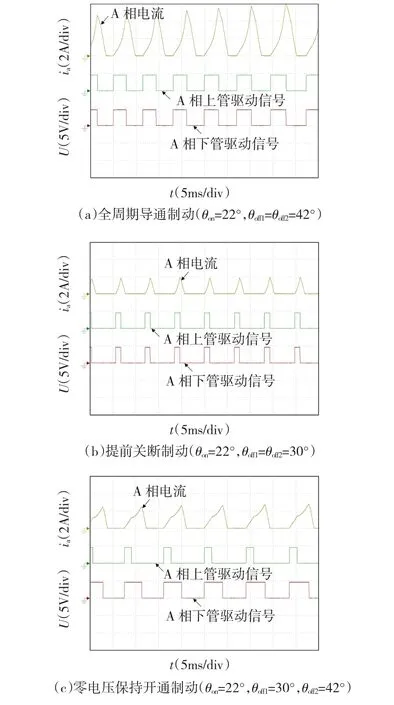
圖11 相電流與驅動信號實驗波形Fig.11 Experimentalwaveform s of phase current and driving signals
若采用零電壓保持開通三步制動控制策略,當零電壓開通初始角θoff1為35°,零電壓關斷角θoff2為42°,制動時間為0.45 s,雖然制動電流峰值降至正常電流的4.5倍,但是母線電壓仍然飆升至100 V,如圖10(d)所示;當零電壓開通初始角θoff1為30°,零電壓關斷角θoff2為42°,制動時間為0.8 s,母線電壓僅升高至73 V,制動電流峰值也僅為正常電流的2.5倍,如圖10(e)所示。在零電壓開通區間內電流仍然繼續上升,如圖11(c)所示,不受反電動勢小于繞組電壓的影響,并且可以有效地將制動電流保持在一定幅值內,產生有效的制動轉矩,同時提高能量回饋利用率。因此采用零電壓保持開通的制動控制策略,選取合適的零電壓保持開通區間,可以有效地抑制母線電壓和制動電流的飆升,同時獲得良好的制動動態響應。
實驗結果與仿真結果具有良好的一致性,研究表明:
1)采用全周期導通制動方式時,再生能量回饋造成母線電壓泵升,超出器件所承受的安全范圍,同時較大的充電電流也可能造成電力電子器件損壞,使系統的可靠性降低。而采用提前關斷的控制方式時,制動電流較小,無法產生足夠的制動轉矩。由于無法有效地工作在發電狀態,其能量利用率較低。
2)采用零電壓保持制動的控制策略時,若零電壓開通初始角度靠近關斷角,雖然充電電流峰值有所下降,但是母線電壓增量仍然較大,系統再生制動下的可靠性仍較低;若零電壓開通初始角度靠近開通角,可以有效地抑制母線電壓泵升和降低過大的充電電流峰值,將其控制在安全電壓和電流范圍內,同時產生一定的制動轉矩,雖然其制動時間有所增加,但仍可以達到快速制動的目的。由于其維持了一定發電狀態下的有效電流面積,使得能量利用率較高,特別是對于電池驅動的系統,可以增加電池的續航能力。
5 結 論
本文對SRM的再生制動過程進行分析,討論了再生制動能量回饋與母線電壓的關系,提出了一種零電壓保持開通的三步制動控制策略,即采用全電壓開通、零電壓保持開通和全電壓關斷的三步制動方式,使制動電流不再受反電動勢較小的影響。選取合適的零電壓保持開通區間,可以有效地抑制母線電壓泵升和過大的充電電流,提高系統制動的安全性,同時產生有效的制動轉矩,達到快速制動的目的。通過下管保持開通的方式,可以維持有效的發電制動狀態,提高系統的能量利用率。
[1] MILLER T JE.Switched reluctancemotors and their control[M]. London:Magna Physics Publishing and Oxford Science Publications,1993:3-25.
[2] SHEN L,WU J,YANG S.Initial position estimation in SRM using bootstrap circuit without predefined inductance parameters[J]. IEEE Transactions on Power Electronics 2011,26(9):2449 -2456.
[3] WANG SY,TSENG C L,CHIEN SC.Adaptive fuzzy cerebellar model articulation control for switched reluctancemotor drive[J]. IET Electric Power Applications,2012,6(3):190-202.
[4] MORON C,GARCIA A,TREMPS E,et al.Torque control of switched reluctancemotors[J].IEEE Transactions on Magnetics,2012,48(4):1661-1664.
[5] GAMEIRO N S,MARQUESC A J.A new method for power converter fault diagnosis in SRM drives[J].IEEE Transactions on In-dustry Application,2012,48(2):653-662.
[6] 周希章,周全.電動機的起動、制動和調速[M].北京:機械工業出版社,2001:91-121.
[7] 王猛,孫澤昌,卓桂榮,等.電動汽車制動能量回收最大化影響因素分析[J].同濟大學學報:自然科學版,2012,40(4):583 -588. WANG Meng,SUN Zezhang,ZHUO Guirong,et al.Maximum braking energy recovery of electric vehicles and its influencing factors[J].Journal of Tongji University:Natural Science,2012,40 (4):583-588.
[8] 張京明,任殿波,杜維南,等.并行再生制動系統控制器的設計與開發[J].中國公路學報,2011,24(5):113-119. ZHANG Jingming,REN Dianbo,DU Weinan,et al.Design and development of controller for parallel regenerative braking system[J].China Journal of Highway and Transport,2011,24(5): 113-119.
[9] 何仁,陳慶樟.用雙開關磁阻電機的汽車能量再生制動技術[J].吉林大學學報:工學版,2009,39(5):1137-1141. HE Ren,CHEN Qingzhang.Vehicle regenerative braking using dual switched reluctance motors/generators[J].Journal of Jilin University:Engineering and Technology Edition,2009,39(5): 1137-1141.
[10] 胡慶波,鄭繼文,呂征宇.混合動力中無刷直流電機反接制動PWM調制方式的研究[J].中國電機工程學報,2007,27 (30):87-91. HU Qingbo,ZHENG Jiwen,LV Zhengyu.Study on PWM strategy for braking of brushless DC motor in hybrid electric vehicle[J].Proceedings of the CSEE,2007,27(30):87-91.
[11] 曹志亮,朱學忠,劉迪吉.開關磁阻電機再生制動分析與應用[J].南京航空航天大學學報,2001,33(1):60-63. CAO Zhiliang,ZHU Xuezhong,LIU Diji.Analysis and application for regenerative brakemode of SRM[J].Journal of Nanjing University of Aeronauties&Astronauties,2001,33(1):60 -63.
[12] HEERAM P,CHOI S B.Development of a sensorless control method for a self-energizing brake system using noncircular gears[J].IEEE Transactions on Control Systems Technology,2013,21(4):1328-1339.
[13] XIN X Z,JIAN C F.Precise braking torque control for attitude control flywheel with small inductance brushless DC motor[J]. IEEE Transactions on Power Electronics,2013,28(11):5380 -5390.
[14] 陳榮,鄧智泉,嚴仰光.基于轉子磁場定向控制的永磁同步電機制動過程分析[J].電工技術學報,2004,19(9):30 -36. CHENG Rong,DENG Zhiquan,YAN Yangguang.Analysis of braking process of permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society,2004,19(9): 30-36.
[15] ITOH JI,AOKIW,GOH TC,etal.Suppressionmethod of rising DC voltage for the halt sequence of an inverter in the motor regeneration[C]//IEEE Energy Conversion Congress and Exposition(ECCE),September 15-19,2013,Denver,USA. 2013:188-195.
[16] HUNG C C,CHANG M L.Development of a compact switchedreluctance motor drive for EV propulsion with voltage-boosting and PFC charging capabilities[J].IEEE Transactions on Vehicular Technology,2009,58(7):3198-3215.
[17] HUNG C C,CHANG M L.On the front-end converter and its control for a battery powered switched-reluctance motor drive. IEEE Transactions on Power Electronics[J].2008,23(4): 2143-2156.
[18] BEN D L,WEIH Z,JIA H Y.The research of an energy recovery retarderwith SRM structure[C]//IEEE International Conference on Mechatronics and Automation(ICMA),August7-10,2011,Beijing,China.2011:1877-1881.
[19] 李廣海,葉勇,蔣靜坪.3kW開關磁阻電機的再生制動實現[J].中國電機工程學報,2004,24(2):124-128. LIGuanghai,YE Yong,JIANG Jingping.Study on regenerative braking of 3kW switched reluctance motor[J].Proceedings of the CSEE,2004,24(2):124-128.
[20] XUE X D,CHENG K W E,NG TW,et al.Investigation on characteristics of braking operation of switched reluctance motor drives for electric vehicles[C]//Australasian Universities Power Engineering Conference(AUPEC),December 14-17,2008,Sydney,Australia.2008:1-6.
[21] XIAO Y L,CHUANG L,MING L,et al.Regenerative braking control strategies of switched reluctancemachine for electric bicycle[C]//IEEE International Conference on Electrical Machines and Systems(ICEMS),October 17-20,2008,Wuhan,China.2008:3397-400.
[22] SHENG M Y,JIAN Y C.Controlled dynamic braking for switched reluctance motor drives with a rectifier front end[J].IEEE Transactions on Industrial Electronics,2013,60(11):4913 -4919.
[23] FERNANDOW,BARNESM.Electromagnetic energy conversion efficiency enhancement of switched reluctance motors with zerovoltage loop current commutation[J].IEEE Transactions on Energy Conversion,2013,28(3):482-492.
(編輯:劉琳琳)
Regenerative braking control strategy for sw itched reluctance motors w ith zero-voltage loop hold
GAN Chun1, WU Jian-hua1, WANG Ning2, YANG Shi-you1
(1.College of Electrical Engineering,Zhejiang University,Hangzhou 310027,China 2;Maintenance Company of State Grid Zhejiang Electric Power Company,Hangzhou 310027,China)
In order to reduce the impact on the DC bus voltage in switched reluctance motor(SRM) driveswhen themotor works in the regenerative braking conditions,the regenerative braking processwas analyzed,the regenerative braking energy on the impact of DC bus voltage was investigated,and a new control strategy of three-step regenerative braking operation with zero-voltage loop hold was proposed.The working principle and implemented method of the proposed scheme were presented in details based on a three-phase SRM.The results show that the essential braking torque can be generated,the impact of braking energy feedback to the DC bus is reduced in the process of regenerative braking,and the reliability and security of the braking operation are improved.The simulation and experiment are carried out to verify the effectiveness and practicality of the proposed method.
switched reluctancemotor;DC bus voltage;regenerative braking;zero-voltage loop hold;reliability
10.15938/j.emc.2015.09.002
TM 352
A
1007-449X(2015)09-0008-08
2014-04-16
國家高技術研究發展計劃“863計劃”(2011AA11A101);國家自然科學基金(51377139)
甘 醇(1987—),男,博士研究生,研究方向為電力電子與電力傳動系統的控制與電磁分析;吳建華(1963—),男,博士,教授,研究方向為現代電機CAD,開關磁阻電機及永磁電機,電機噪聲振動抑制;王 寧(1990—),女,碩士,研究方向為發電機電磁仿真與配電網自動化;楊仕友(1964—),男,教授,博士生導師,研究方向為電磁場理論及其應用。
吳建華
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36