激光掃描技術在建筑變形監測中的研究
2015-06-28 06:15:24王芬旗吳敦廖佳施斌何勁源
城市勘測 2015年4期
王芬旗,吳敦,廖佳,施斌,何勁源
(寧波市測繪設計研究院,浙江 寧波 315042)
1 前 言
作為前沿科技,地面三維激光掃描技術在文物古建筑保護、施工檢測、地質災害監測等方面有較為廣泛的應用,但在建筑物變形監測方面的應用實例較少,未形成體系。將地面三維激光掃描技術引入到建筑變形監測中,具有極大的現實意義。
城市高層建筑的變形觀測及安全監測是維護建筑物正常使用的必要技術措施。變形監測的技術手段多種多樣,目前主要采取的方法有:常規測量、GPS 測量、傳感測量等。利用常規測量方式進行變形監測,需要在變形體上布設監測點,由于監測點的數量有限、測量效率低、受雨霧影響大,新技術的研究和引入對于提高變形監測效率有重要的意義。
通過對地面三維激光掃描技術的測量原理、測量工藝流程和變形監測方法的研究,探索了激光掃描技術在建筑變形監測領域的可行性,從而進一步推動三維激光掃描技術在測繪領域的應用。
2 建設變形監測工程控制網
利用全站儀建設變形監測工程控制網,具體工作內容為完成變形監測控制網點位的選埋和測量工作,主要包括點位選埋、高程控制和平面控制。控制點的選擇應保證通視性及對建筑物有足夠的觀察視角。在沉降穩定的區域內,保證通視的前提下,在規劃大廈周邊選點5 個,其中按一級水準和二級導線控制。
硬件配置上,滿足項目需要,確保項目的進度不受影響。投入使用的測量儀器,應在有效的檢定周期內,確保成果精度的可靠性,擬投入的硬件如表1所示。

項目投入儀器設備情況表 表1
平面控制網采用自由網形式,故坐標系統為獨立工程坐標系,坐標零點為虛擬點(以K01 為原點的正西南方處),北方向(X 方向)為KZ05-KZ01 方向,東方向(Y 方向)為與北方向垂直的右方向,如圖1 所示。

圖1 平面和高程控制網
高程控制網采用自由網形式,高程原點為K01,并設K01 高程為3 m,如表2 所示。
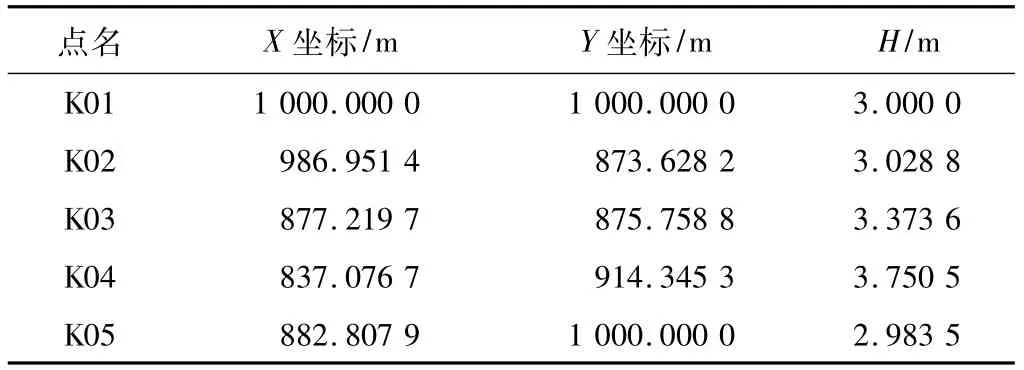
平面和高程控制網成果表 表2
閉合導線成果質量說明:
(1)導線平均點位誤差為1.2 mm,精度最弱點為K04,其中誤差為1.42 mm,
(2)導線測邊相對精度為1/163200,最弱邊為K03-K04,其相對精度為1/89000,
(3)導線角度閉合差為21.6″,邊長閉合差為15.2 mm,導線全長相對閉合差為1/33294,
(4)導線測量成果符合變形監測控制測量三級導線測量精度要求。
水準測量成果質量說明:
①水準測量高差中誤差為0.43 mm/km,符合一等水準0.45 mm/km限差要求,
②水準環閉合差為-0.33 mm,符合一等水準“2倍閉合環長度開方”要求。
3 基于全站儀和激光掃描儀變形監測
3.1 最佳布站距離
掃描儀到掃描對象的距離越大,測距精度越低,而且采樣分辨率低,產生噪聲就大。以某品牌掃描儀3 min工作檔位為例,在長50 m的場地起點位置放置好靶標球,依次在靶標球距測站的距離10 m、20 m、30 m、40 m和50 m進行不同位置兩次掃描測試。測試結果顯示,某品牌掃描儀3 min工作檔位,30 m范圍內布置靶標球,既能使得點云數量不至于過于龐大,又能使得點云配準精度得到保障,從而提高工作效率。如圖2 所示:

圖2 某品牌掃描儀3 min 檔位最佳掃描距離研究試驗
3.2 點云數據采集
根據精度和環境要求,選擇合適的三維激光掃描儀對建筑物進行掃描采集數據。在建筑物周身粘貼合適的反射標靶,通過3 個或以上的標靶中心確定的平面作為橫截面提取的基準面。該標靶也是內業數據處理過程中的點云配準的重要信息。在測站兩側無遮擋的內布置好6 個以上的靶標球,每側至少3 個,用于激光點云數據的拼接,根據不在同一直線的3 點決定一個平面的原則,放置靶標球時應不處于同一直線上,并盡量分散放置,變形監測流程如圖3 所示。

圖3 變形監測流程
3.3 激光掃描儀和全站儀之間的測量誤差分析
掃描儀系統誤差模型的完善。地面三維激光掃描儀的檢校中,采用的誤差模型是基于全站儀的誤差模型,掃描儀的結構與全站儀的結構不同,有必要進一步深入研究地面三維激光掃描儀內部結構,探討和完善掃描儀系統誤差模型。因為所使用的全站儀為高精度全站儀,故以全站儀所測值為真值,點云拼接結果與全站儀數據的對比,得出中誤差。
中誤差公式:
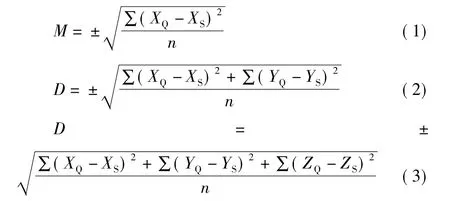
限于篇幅,僅以第一期激光掃描數據與全站儀測繪數據比較得知:三維激光標靶點的測量具有很高精度,激光掃描技術完全可以適用于高精度的變形監測領域,如表3、表4 所示。

第一期測量數據比較 表3

第一期點精度分析 表4
4 建筑變形分析
將前后兩期掃描得到的中軸線節點坐標進行比較,提取變形信息。同時,為進行對比驗證,可擬合得到兩期掃描中標靶中心確定的基準面的中心坐標,并將兩期坐標進行比較分析,如圖4 所示。
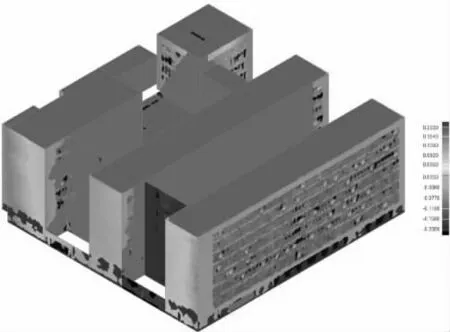
圖4 建筑變形分析
5 小 結
利用激光掃描技術,高效和高精度地采集數據,通過一定數據處理方法處理,其計算結果可靠,滿足精度要求。單點定位精度可滿足一般工程測量要求,整體測量可判定建筑變形趨勢和計算建筑變形量。
[1]吳侃,黃承亮,陳冉麗.三維激光掃描技術在建筑物變形監測的應用[J].遼寧工程技術大學學報·自然科學版,2011,30(2):205~208.
[2]程效軍,施貴剛,王峰等.點云配準誤差傳播規律的研究[J].同濟大學學報·自然科學版,2009,37(12):1668~1672.
[3]李章樹,馬磊,馬小雪等.一種基于掃描點云數據儲氣罐支柱形變監測新方法[J].遙感信息,2014,29(1):19~22.
[4]李濱,王漢順,段奇三等.點云檢測技術在高速公路邊坡監測中的應用[J].城市勘測,2014(8):20~26.
[5]李仁忠,劉潔.三維激光掃描技術在高層建筑變形監測中的應用[J].重慶建筑,2010,9(84):42~45.
[6]施貴剛,程效軍,官云蘭等.地面三維激光掃描點云配準的最佳距離[J].江蘇大學學報·自然科學版,2008:197~200.
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
電測與儀表(2016年9期)2016-04-12 00:29:52
