某型導引頭半物理仿真系統(tǒng)設計
2015-07-01 07:57:44王歡,白楊,江晟
兵器裝備工程學報 2015年5期
王 歡,白 楊,江 晟
(中國科學院長春光學精密機械與物理研究所,長春 130033)
全捷聯(lián)電視導引頭是圖像制導武器的核心部分,其性能直接影響導彈的制導及飛行控制信號,對導彈的精確末制導打擊性能起著關鍵作用。作為精確制導武器研制過程中的重要過程,半物理仿真能夠在地面環(huán)境下,較為真實反映目標探測、制導控制等部分構(gòu)成的全系統(tǒng)的動態(tài)與靜態(tài)特性,進而對系統(tǒng)的整體性能進行驗證和評價,大約有90%左右的導彈系統(tǒng)評估參數(shù)來自半物理仿真實驗[1-3]。
張凱[4]、張崇斌[5]等通過模擬器的方式實現(xiàn)對導引頭中的測試,實現(xiàn)條件需要軟硬件配合,較為復雜并且缺乏直觀性;邵立勇[6]等通過Virtools 實現(xiàn)了導彈導引頭攻擊直升機的動態(tài)演示仿真,齊竹昌[7]等通過Vega Prime 演示了導引頭攻擊目標過程中飛行姿態(tài)的變化進行彈道分析和設計,視景工作僅用于演示,未能在實際測試閉環(huán)中發(fā)揮作用; 靳文平[8]等通過紅外圖像注入系統(tǒng)實現(xiàn)對紅外導引頭的半物理測試,注入系統(tǒng)針對性較強,不具普適性。而可視化仿真技術(shù)把仿真中的數(shù)字信息變?yōu)橹庇^的、以圖形圖像形式表示出來,在航空航天、軍事中發(fā)揮著越來越重要的作用[9]。在對導引頭半物理系統(tǒng)基礎上,本文對基于Unity3D 的可視化仿真系統(tǒng)進行了研究,建立了可視化仿真和典型目標模型,分析了半物理仿真系統(tǒng)的基本組成、實現(xiàn)流程及關鍵技術(shù)。最后建立起一套可視化半物理仿真平臺,成功完成了導引頭的閉環(huán)測試。
1 半物理系統(tǒng)方案設計及組成
全捷聯(lián)電視導引頭半物理仿真系統(tǒng)由可視化仿真系統(tǒng)、導引頭、制導系統(tǒng)、姿態(tài)自動駕駛儀、舵機、模型仿真機、轉(zhuǎn)臺及IMU 組成,如圖1 所示。
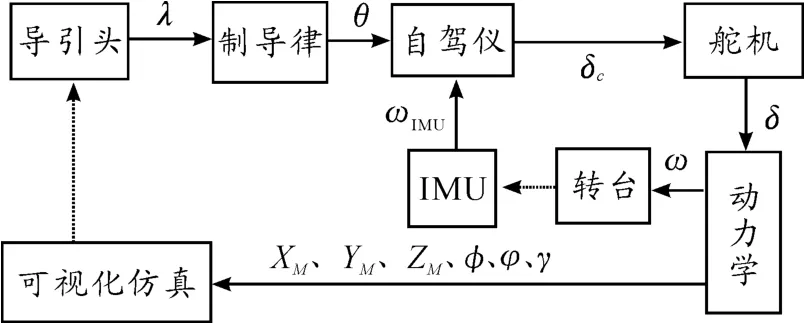
圖1 仿真系統(tǒng)框架圖
1.1 層流區(qū)、紊流區(qū)氣動加熱計算
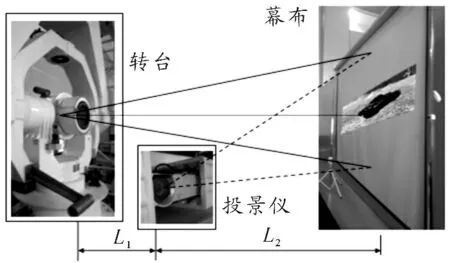
圖2 視景系統(tǒng)位置示意圖
可視化仿真系統(tǒng)主要包括可視化仿真機、投影儀和投影幕,為導引頭提供擬真的作戰(zhàn)環(huán)境,其中搭載導引頭的轉(zhuǎn)臺與可視化仿真系統(tǒng)的相對位置關系如圖2 所示。模擬戰(zhàn)場環(huán)境基于Unity3D 實現(xiàn),主要包括戰(zhàn)場地形創(chuàng)建(圖3)、目標建立及配置(圖4)、環(huán)境參數(shù)(天空、地面、光照度等)配置(圖5),最后導出可執(zhí)行程序文件。
圖3 戰(zhàn)場地形圖

圖4 典型目標圖
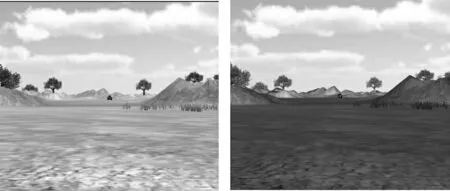
圖5 戰(zhàn)場環(huán)境中的天空、地面及強弱光照圖
1.2 制導律
針對全捷聯(lián)電視導引頭特點,本文采用彈體追蹤法作為制導律。假定導彈為一可控質(zhì)量的質(zhì)點M,以恒定的速度V飛向目標T,如圖6 所示,彈體追蹤法體現(xiàn)的導彈與目標的相對運動位置關系為
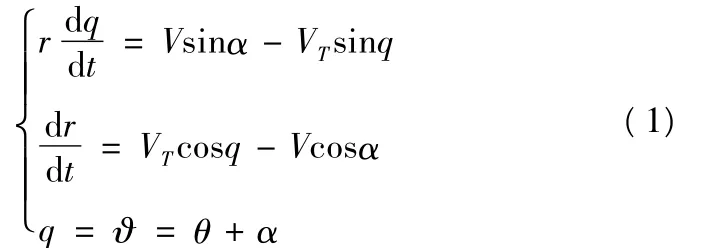
式(1)中:r 導彈與目標相對距離;V、VT分別代表導彈、目標的速度;q 代表彈體縱軸與目標速度矢量夾角;α 導彈攻角;?為俯仰角;θ 為彈道傾角。
本文導彈打擊靜止坦克目標,即VT=0,式(1)可簡化為


圖6 視景系統(tǒng)位置示意圖
1.3 全捷聯(lián)電視導引頭
針對導彈高速打擊特點,圖像處理平臺選取DSP-FPGA復合架構(gòu),如圖7 其中FPGA 板(第2 層)提供各種數(shù)據(jù)接口,DSP(第1 層)主要負責對圖像處理算法的運算。此架構(gòu)系統(tǒng)處理幀頻可達50 Hz,其快速性滿足導彈末制導指令需求。
圖7 全捷聯(lián)電視導引頭及圖像跟蹤器硬件平臺
2 可視化仿真標定
小孔成像原理如圖8 所示,OXY 表示光學平面,O 表示光心,oxy 表示CCD 成像平面坐標,P 表示慣性系下的真實目標,oxy 下的p 表示目標在像平面的像。
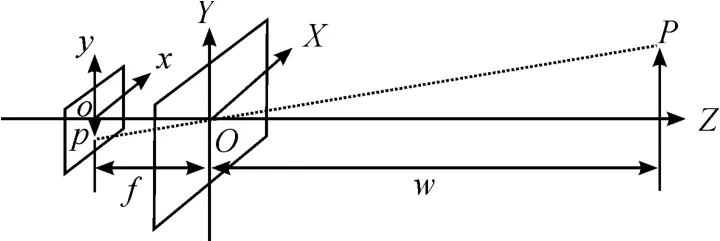
圖8 小孔成像原理示意圖
根據(jù)相機基本參數(shù),CCD 面陣1 024 ×768 pixel,象元大小s=5.5 μm,焦距f=13.5 mm,目標距離光學成像中心w=1.2 km,目標高度P=2.3 m,因此根據(jù)式(3)可計算目標在成像平面上大小

計算可得目標成像大小p=25.875 μm,則目標成像占像平面像素數(shù)為p/s =5 pixel,通過Matlab 采集的目標大小適時調(diào)整投影儀投射大小以及幕布的距離(圖9),最終確定導引頭魚投影之間距離L1=0.5 m,投影儀與幕布之間距離為L2=2.3 m,導引頭傳輸?shù)拿摪辛繑?shù)據(jù)信息通過彈體動力學模型進行數(shù)據(jù)直接補償,進而確定圖像中心位置。

圖9 Matlab/Simulink 采集的目標圖像
3 仿真分析
針對該全捷聯(lián)電視導引頭項目需求進行半物理仿真,仿真環(huán)境及條件如表1 所示。
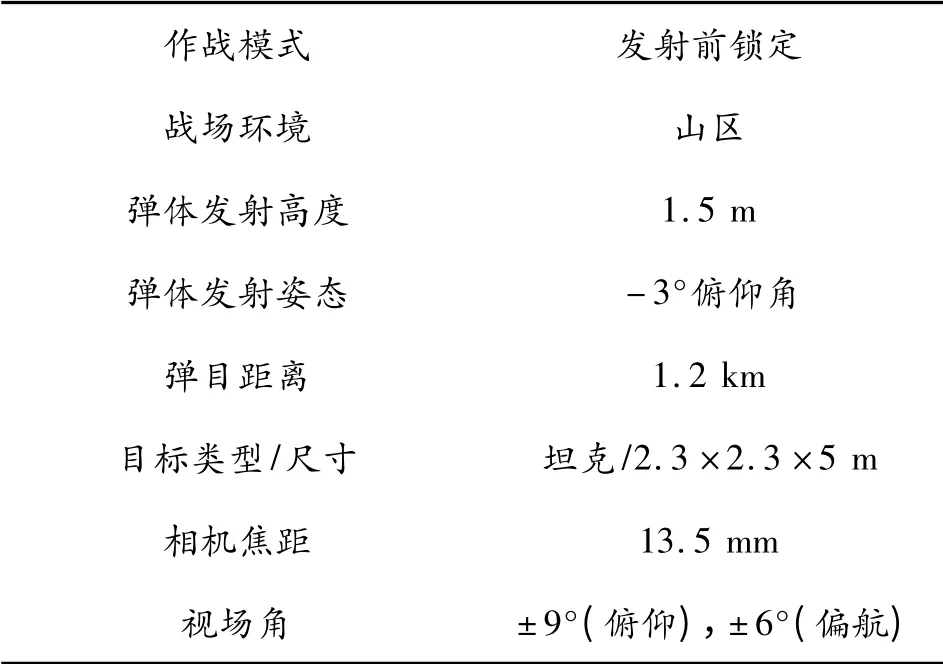
表1 半物理仿真條件
在仿真試驗中:
1)通過彈體動力學模型仿真計算機確定彈體及目標的初始位置、姿態(tài),通過RS232 傳送至可視化仿真機,由投影儀投影至幕布展現(xiàn)戰(zhàn)場環(huán)境。
2)通過導引頭上位機對導引頭進行自檢、對時、工作狀態(tài)確定等指令,進行人工目標識別及鎖定,使能導引頭進入目標跟蹤狀態(tài)。
3)啟動飛行仿真,制導系統(tǒng)通過接收導引頭目標脫靶量信息導向并最終摧毀目標,仿真結(jié)束。
在整個目標打擊過程中,導引頭跟蹤目標準確、穩(wěn)定,跟蹤誤差(目標充滿視場之前)在3 個像素之內(nèi),目標打擊視頻序列如圖10 所示。
圖11 展現(xiàn)了導彈的縱向平面內(nèi)彈道曲線,如圖12 所示,數(shù)字仿真和半物理仿真條件下的導引頭脫靶量數(shù)據(jù)對比可知,導引頭平面誤差角在0.09°之內(nèi)。圖13 顯示在俯仰方向,半物理彈目視線角速度值與理論仿真值之差小于0.17 deg/s,圖14 顯示過載指令ayc≤2 g,滿足彈體制導控制指標需求,能夠?qū)崿F(xiàn)導引頭的精確打擊。
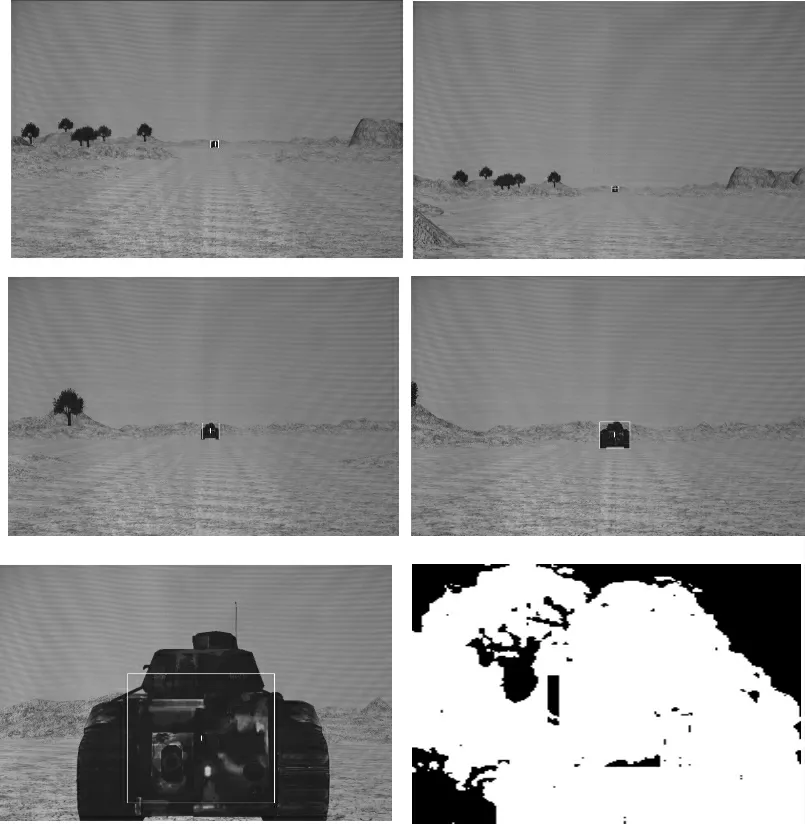
圖10 導彈打擊目標過程視頻序列

圖11 導彈彈道曲線
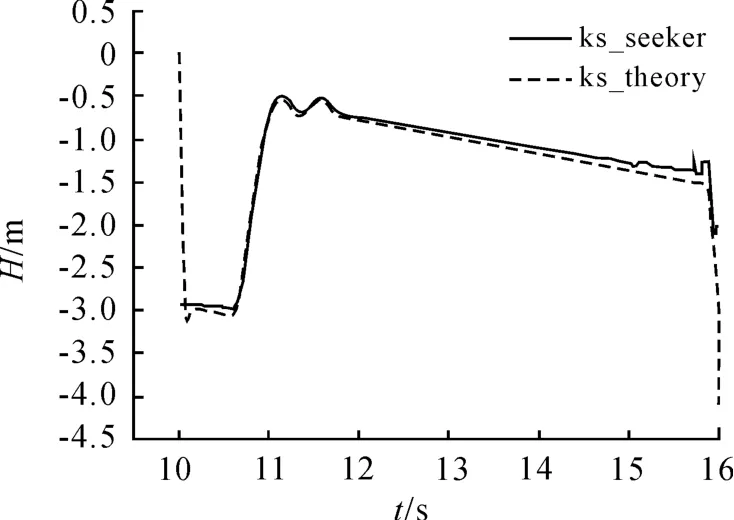
圖12 導引頭平面誤差角
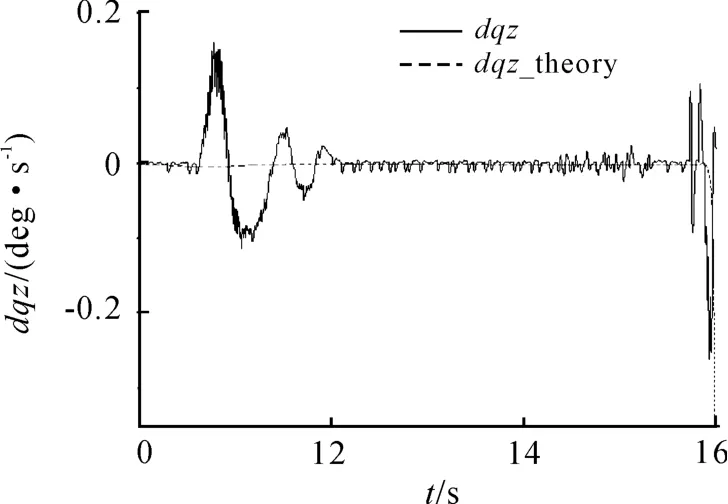
圖13 俯仰方向的彈目視線角速度

圖14 導彈過載指令
4 結(jié)論
本文搭建的基于Unity3D 的可視化半物理仿真系統(tǒng),獲取導彈的彈道和姿態(tài)角等信息,高效地模擬了戰(zhàn)場環(huán)境和導彈打擊目標過程:目標脫靶量誤差值小于0.09°;彈目視線角速度誤差值小于0.17 deg/s。
完成了導引頭的閉環(huán)仿真測試,實現(xiàn)了目標的精確打擊試驗,驗證了可視化半物理平臺的正確性和有效性,可為導彈導引頭跟蹤系統(tǒng)和制導系統(tǒng)的驗證提供有效的試驗保障手段。
[1]沈永福,鄧方林,柯熙政.激光制導炸彈導引頭半實物仿真系統(tǒng)方案設計[J].紅外與激光工程,2002,31(2):166-169.
[2]龔錚,武文峰.某型試飛器半實物仿真系統(tǒng)的設計[J].四川兵工學報,2013(7):7-10.
[3]孔德永.魚雷武器控制系統(tǒng)半實物仿真系統(tǒng)設計與實現(xiàn)[J].四川兵工學報,2012(6):1-5.
[4]張凱,孫力,閆杰.基于DMD 的紅外場景仿真器設計及測試[J].紅外與激光工程,2008(37):369-372.
[5]張崇斌,白云,龍振國,等.導引頭目標模擬器設計與實現(xiàn)[J].火力與指揮控制,2012,37(10):165-168.
[6]邵立勇,徐勁祥,李美紅,等.反直升機導彈視景仿真系統(tǒng)研究[J].戰(zhàn)術(shù)導彈技術(shù),2014(1):94-99.
[7]齊竹昌,劉莉,龍騰,等.基于Vega Prime 的彈道視景準實時仿真研究[J]. 彈箭與制導學報,2013,33(1):145-149.
[8]靳文平,符文星,肖堃,等.紅外導引頭半實物仿真中紅外圖像注入器設計[J].電子設計工程,2014,22(2):159-161.
[9]黃柯棣,劉寶宏. 作戰(zhàn)仿真綜述[J]. 系統(tǒng)仿真學報,2004,16(9):1887-1895.
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
工業(yè)設計(2022年8期)2022-09-09 07:43:20
世界科學技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
海洋信息技術(shù)與應用(2020年1期)2020-06-11 12:43:56
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
傳媒評論(2019年4期)2019-07-13 05:49:14
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
