預(yù)防交叉口死鎖的信號(hào)配時(shí)方法
2015-07-03 09:20:59陳睿楊顧練李海濤姜沈陽(yáng)
中國(guó)科技縱橫 2015年12期
陳睿楊 顧練 李海濤 姜沈陽(yáng)
【摘 要】由于交通瓶頸處的排隊(duì)車(chē)輛上溯到上游交叉口,導(dǎo)致的上游交叉口車(chē)流不能正常運(yùn)行。造成這種現(xiàn)象的主要原因是信號(hào)配時(shí)不合理造成的前車(chē)預(yù)估不足,后車(chē)盲目跟隨導(dǎo)致交叉口擁堵。目前,信號(hào)配時(shí)方法通常假定車(chē)輛能夠正常通過(guò)交叉口實(shí)現(xiàn)信號(hào)配時(shí),但交通過(guò)飽和狀態(tài)下車(chē)輛往往難以正常通過(guò)交叉口,形成“死鎖”現(xiàn)象。為避免交叉口的“死鎖”,本文定義排隊(duì)強(qiáng)度對(duì)信號(hào)配時(shí)控制策略進(jìn)行優(yōu)化,避免信號(hào)交叉口出現(xiàn)死鎖現(xiàn)象。
【關(guān)鍵詞】死鎖 感應(yīng)控制 排隊(duì)強(qiáng)度
1引言
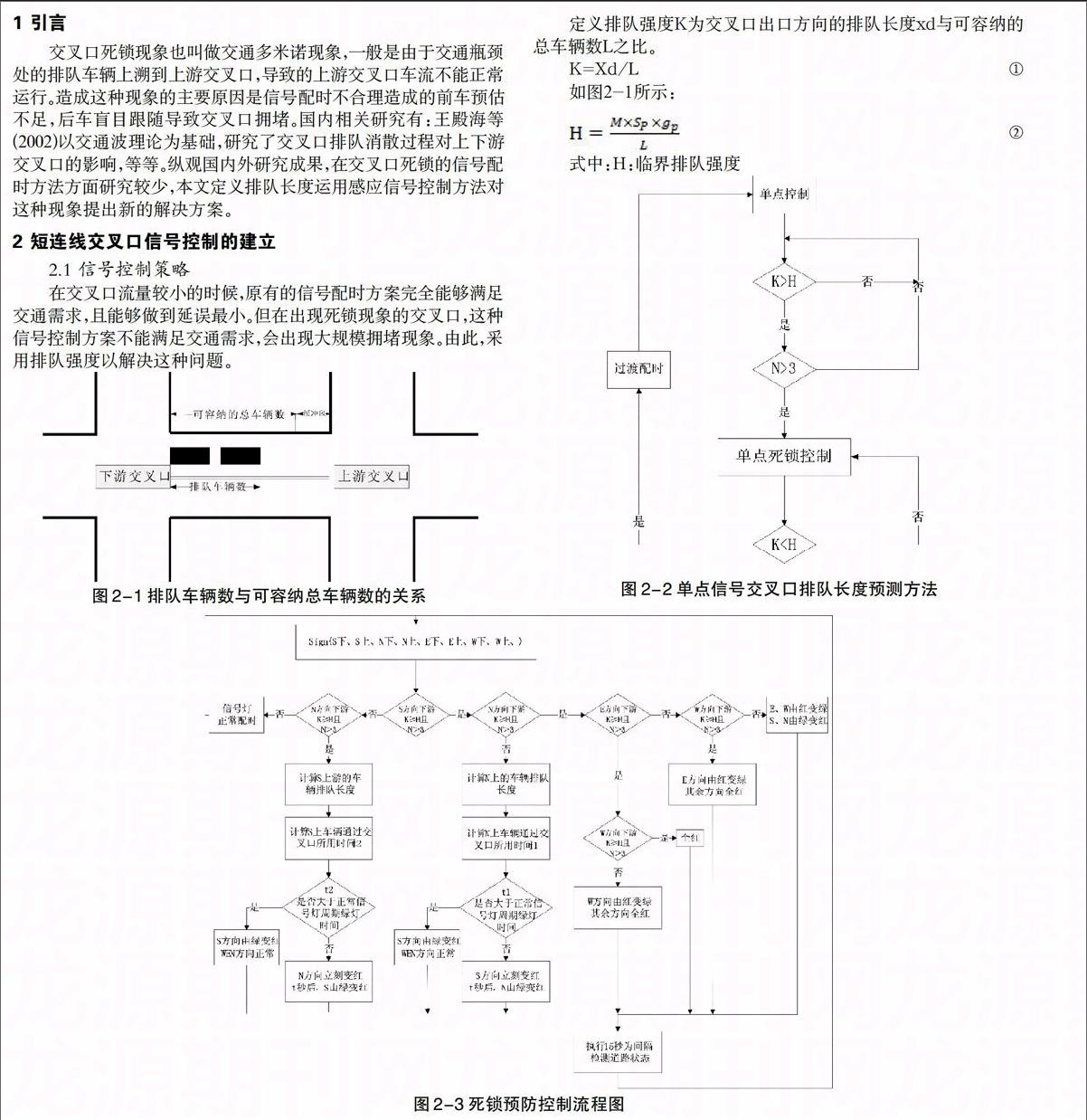
交叉口死鎖現(xiàn)象也叫做交通多米諾現(xiàn)象,一般是由于交通瓶頸處的排隊(duì)車(chē)輛上溯到上游交叉口,導(dǎo)致的上游交叉口車(chē)流不能正常運(yùn)行。造成這種現(xiàn)象的主要原因是信號(hào)配時(shí)不合理造成的前車(chē)預(yù)估不足,后車(chē)盲目跟隨導(dǎo)致交叉口擁堵。國(guó)內(nèi)相關(guān)研究有:王殿海等(2002)以交通波理論為基礎(chǔ),研究了交叉口排隊(duì)消散過(guò)程對(duì)上下游交叉口的影響,等等。縱觀國(guó)內(nèi)外研究成果,在交叉口死鎖的信號(hào)配時(shí)方法方面研究較少,本文定義排隊(duì)長(zhǎng)度運(yùn)用感應(yīng)信號(hào)控制方法對(duì)這種現(xiàn)象提出新的解決方案。
2短連線(xiàn)交叉口信號(hào)控制的建立
2.1信號(hào)控制策略
在交叉口流量較小的時(shí)候,原有的信號(hào)配時(shí)方案完全能夠滿(mǎn)足交通需求,且能夠做到延誤最小。但在出現(xiàn)死鎖現(xiàn)象的交叉口,這種信號(hào)控制方案不能滿(mǎn)足交通需求,會(huì)出現(xiàn)大規(guī)模擁堵現(xiàn)象。由此,采用排隊(duì)強(qiáng)度以解決這種問(wèn)題。
定義排隊(duì)強(qiáng)度K為交叉口出口方向的排隊(duì)長(zhǎng)度xd與可容納的總車(chē)輛數(shù)L之比。 K=Xd/L ①
如圖2-1所示:
圖2-1排隊(duì)車(chē)輛數(shù)與可容納總車(chē)輛數(shù)的關(guān)系
②
式中:H:臨界排隊(duì)強(qiáng)度
Sp:本相位飽和流率
Gp:相位最大綠燈時(shí)間
M:調(diào)節(jié)系數(shù)(M≥1)
M=1時(shí)下游可容納最大排隊(duì)車(chē)輛數(shù)正好等于每周期可釋放的最大車(chē)輛數(shù),此時(shí)若排隊(duì)車(chē)輛數(shù)正好為下游可容納的最大排隊(duì)車(chē)輛數(shù)則表示相位的交通需求已經(jīng)達(dá)到交通供給水平,仍有超過(guò)交通需求的可能。此時(shí)應(yīng)該判斷本相位已經(jīng)處于飽和狀態(tài)。所以M必須不小于1,而m的具體取值可以根據(jù)實(shí)際的交通情況來(lái)確定。
圖2-2單點(diǎn)信號(hào)交叉口排隊(duì)長(zhǎng)度預(yù)測(cè)方法
開(kāi)始時(shí)交叉口實(shí)行原有的單點(diǎn)控制配時(shí),并且對(duì)交叉口得擁擠情況進(jìn)行實(shí)時(shí)監(jiān)測(cè),當(dāng)檢測(cè)到K≥H(臨界排隊(duì)強(qiáng)度),記為交叉口下游出現(xiàn)擁堵現(xiàn)象,而當(dāng)擁堵持續(xù)周期N≥3時(shí),作為約束條件的觸發(fā)條件,開(kāi)始進(jìn)行死鎖預(yù)防控制方案。
當(dāng)K 如圖2-3為死鎖預(yù)防控制方案: 圖2-3死鎖預(yù)防控制流程圖 圖2-3基于信號(hào)交叉口死鎖的信號(hào)控制方式實(shí)際上是一種感應(yīng)控制方法,此方法適用于兩交叉口距離較近而且車(chē)流量較大的時(shí)段,尤其是在車(chē)流量大,綠燈時(shí)間相對(duì)較短的情況下較為明顯,本方案通過(guò)信號(hào)交叉口的檢測(cè)器與視頻檢測(cè)進(jìn)行15秒鐘間隔的道路檢測(cè),隨時(shí)對(duì)信號(hào)交叉口各個(gè)方向下游擁堵時(shí)間進(jìn)行檢測(cè)。 2.2關(guān)鍵參數(shù)取值依據(jù) 預(yù)防死鎖控制方案的關(guān)鍵參數(shù)取值依據(jù)如下: (1)車(chē)輛最小綠燈時(shí)間Gmin 。車(chē)輛最小綠燈時(shí)間Gmin應(yīng)滿(mǎn)足排隊(duì)車(chē)輛消散的要求,因此使用各個(gè)相位關(guān)鍵進(jìn)口道的車(chē)隊(duì)消散時(shí)間 Ti 來(lái)確定車(chē)輛最小綠燈時(shí)間計(jì)算方法如下: 式中: Ti ——相位i關(guān)鍵進(jìn)口道的車(chē)隊(duì)疏散時(shí)間(s); qimax——相位i關(guān)鍵進(jìn)口道的最大排隊(duì)長(zhǎng)度(輛), Si ——相位i關(guān)鍵進(jìn)口道的飽和流率(輛/s); qi ——相位i關(guān)鍵進(jìn)口道的到達(dá)率(輛/s); ri ——相位i的紅燈時(shí)間(s); (2)車(chē)隊(duì)通過(guò)交叉口所用時(shí)間t。車(chē)隊(duì)通過(guò)交叉口需要的時(shí)間可以看為車(chē)隊(duì)尾車(chē)通過(guò)交叉口的時(shí)間。即為綠燈啟亮?xí)r刻啟動(dòng)波傳至隊(duì)尾的時(shí)間與尾車(chē)加速通過(guò)交叉口的時(shí)間之和。 啟動(dòng)波:根據(jù)格林希爾治線(xiàn)性模型推導(dǎo)的啟動(dòng)波模型 所以啟動(dòng)波的波速為 啟動(dòng)過(guò)程中,u2數(shù)值上較小,與uf相比可忽略不計(jì)。 假設(shè)車(chē)隊(duì)中有N輛車(chē),以啟動(dòng)波波速為w傳遞到第N輛車(chē)的時(shí)間為: 式中:l:車(chē)隊(duì)中車(chē)輛的平均長(zhǎng)度 由基礎(chǔ)運(yùn)動(dòng)學(xué)知識(shí)可知:假設(shè)車(chē)輛啟動(dòng)后加速度為a,加速經(jīng)過(guò) 時(shí)間后速度到達(dá) ,車(chē)輛保持勻速 通過(guò)交叉口,所行駛的距離為 ① 其中L1為交叉口內(nèi)部長(zhǎng)度。同時(shí)通過(guò)上圖可以求得車(chē)輛行駛過(guò)得距離為: ② 由①式與②式可求出 ,即為尾車(chē)加速通過(guò)交叉口的時(shí)間,則車(chē)隊(duì)通過(guò)交叉口所用時(shí)間: 2.3模型適用性分析 本文的交叉口信號(hào)配時(shí)模型是以延誤最小為目標(biāo),以每周期釋放車(chē)輛數(shù)不超過(guò)下游可容納的排隊(duì)長(zhǎng)度為約束條件,該模型適用于鄰近交叉口間距相對(duì)較短并且交叉口流量較大的信號(hào)交叉口。但不適用與過(guò)小或者過(guò)大的交叉口,如果應(yīng)用此模型可能會(huì)造成各方向延誤增加的情況,因此該模型不適用這種狀況。
- 中國(guó)科技縱橫的其它文章
- 大學(xué)生節(jié)儉意識(shí)及落實(shí)度調(diào)查分析*
——以川北醫(yī)學(xué)院為例 - PBN導(dǎo)航對(duì)民航進(jìn)近方式發(fā)展的影響
- 傳統(tǒng)藝術(shù)音像數(shù)字化項(xiàng)目建設(shè)與保護(hù)
- 風(fēng)向風(fēng)速儀在新津機(jī)場(chǎng)監(jiān)測(cè)中的應(yīng)用及體會(huì)
- 由意識(shí)力證明超光速并轉(zhuǎn)化成電能解決能源問(wèn)題
- 光學(xué)的創(chuàng)新與實(shí)虛轉(zhuǎn)化技術(shù)的哲學(xué)解讀