CKVision在分選設備視覺定位中的應用
2015-07-04 01:41:46尚美杰
電子工業(yè)專用設備 2015年9期
劉 丹,尚美杰,郭 東,紀 偉
(中國電子科技集團公司第四十五研究所,北京100176)
分選設備的視覺定位系統(tǒng)是采用工業(yè)相機將被檢測的物體轉換成圖像信號,傳遞給圖像處理系統(tǒng),圖像處理系統(tǒng)對這些信號進行各種運算來抽取被檢測物體的特征,如數量、幾何中心、角度、灰度等,再根據預設的搜索范圍和搜索條件來輸出結果,如幾何中心、角度、個數、合格/ 不合格、有/無等,實現自動識別定位功能。
1 分選設備結構與工作原理
分選設備可分為運動部件,機器視覺,人機交互三個部分。其中,運動部件由擺臂和頂針機構、晶片臺機構以及工作臺機構組成;機器視覺部分由相機、鏡頭和光源組成;人機交互由工控機、顯示器、鼠標和鍵盤組成。各部件具體組成及相互關系如圖1所示。
在分選設備上晶片臺機構用于承載晶圓來料,可實現x、y 及z 向運動。工作臺機構用于承載Tray 盤,可實現x、y 向運動。擺臂和頂針機構用于實現將芯片從晶片臺的晶圓上抓取并放置到工作臺的Tray 盤碗杯內,可實現z 向及θ 向旋轉運動。視覺系統(tǒng)分為兩路,分別設置在晶片臺上方和工作臺上方,用于實現擺臂和頂針機構的三點對準設置、晶片臺側芯片的識別定位和工作臺側Tray 盤碗杯的識別定位工作。其工作原理是將符合要求的芯片從藍膜(或UV 膜) 上拾取起來放置到工作臺Tray 盤的碗杯內,詳見圖2所示。

圖1 分選設備硬件結構框圖
2 原用圖像處理軟件的不足
分選設備對芯片的抓取和放置都依賴于視覺系統(tǒng)的識別定位,抓取的位置是否正確,抓取的芯片是否合格都取決于圖像識別的結果,因此圖像識別在分選設置上占有重要地位。
分選設備要求能識別帶墨點的芯片,正常光亮條件下帶墨點的芯片成像如圖3所示,在圖像識別處理上對芯片的識別定位主要分為圖像特征匹配和圖像灰度匹配兩種方式。圖像特征匹配是提取圖像中保持不變的特征進行匹配識別,圖像灰度匹配是直接利用全部可用的圖像灰度信息進行匹配識別,原圖像處理軟件對芯片的識別采用圖像灰度匹配的方式。這種方式在識別有墨點的芯片時就需要將墨點顏色與芯片顏色盡量區(qū)分開,我們通常采用加大相機的曝光值和光源亮度的方式以達到該目的,打亮光源后的圖像如圖4所示,再適度的調節(jié)識別分數從而獲得較好的識別率。這種方式雖然可以將墨點識別出來,但過度的曝光降低了相機的使用效率,同時也不可避免的存在識別誤差,例如對于面積相對較小的墨點就無法識別。
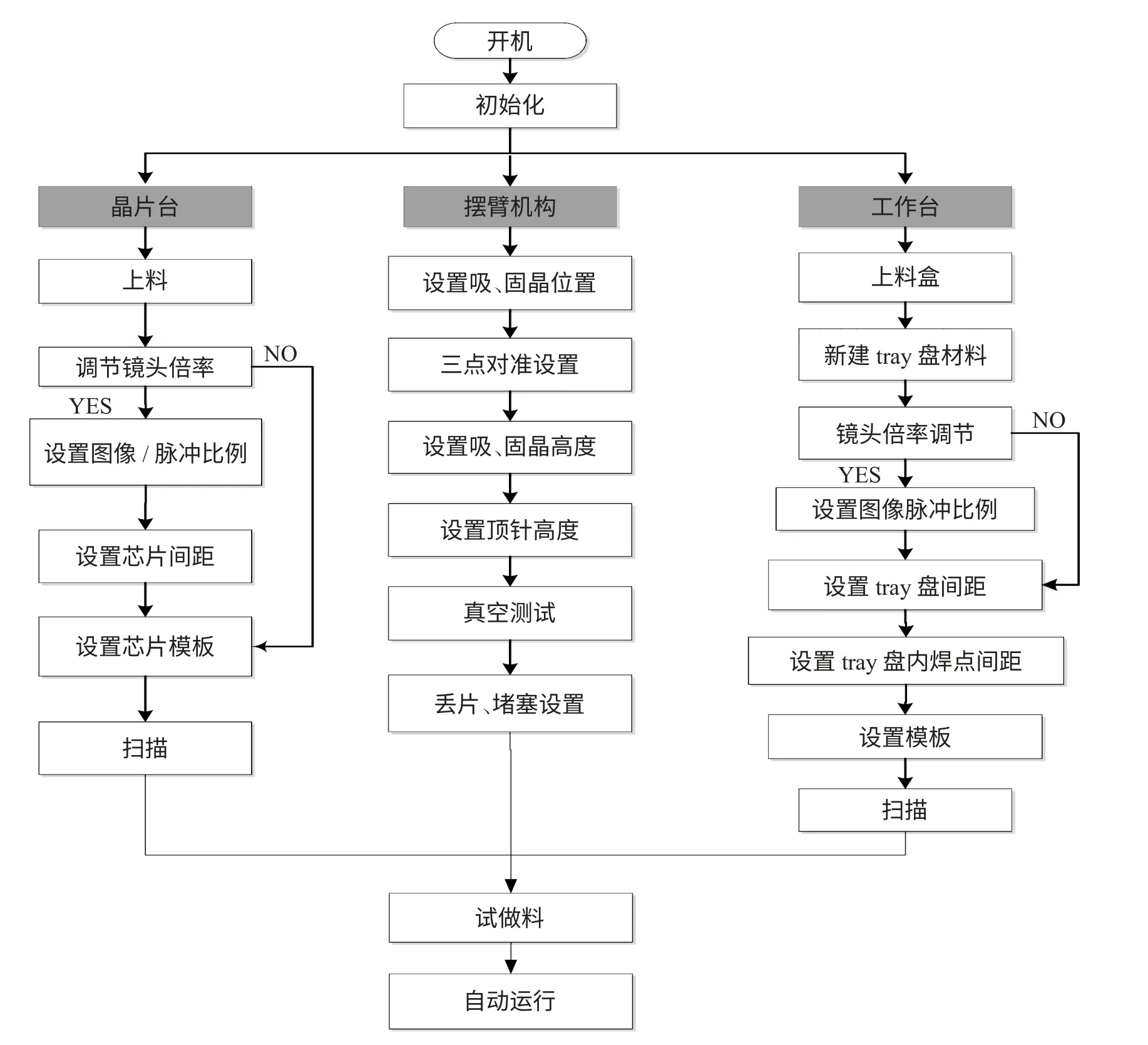
圖2 分選設備工藝流程圖

圖3 正常光亮條件下芯片成像
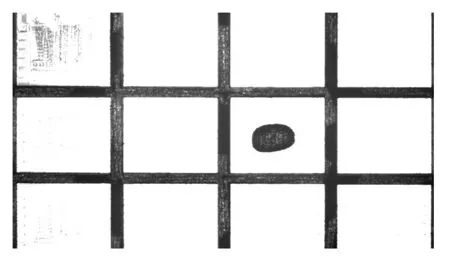
圖4 加大光源亮度條件下芯片成像
3 改進軟件設計
3.1 CKVision 圖像處理軟件
深圳市創(chuàng)科自動化控制有限公司是一家高科技軟件公司,專業(yè)從事開發(fā)機器視覺軟件系統(tǒng)。公司自成立以來致力于圖像算法的研究,成功開發(fā)出易編程的CKVision 機器視覺處理軟件。CKVision 具有精度高、穩(wěn)定性強,識別速度快,功能全面,對環(huán)境光線干擾不敏感,檢測可靠性極高等特點;支持所有圖像采集設備,適用范圍廣;在功能上分為多個模塊,以類庫形式封裝,開發(fā)應用方便;全中文開發(fā)例程,容易解讀;被廣泛應用于半導體、電子產品、食品、藥品和印刷等行業(yè)。
CKVision 視覺軟件包含以下功能模塊:
圖像預處理功能;
二維測量功能;
缺陷檢測功能;
目標定位功能;
相機標定功能;
彩色分析功能。
3.2 功能分析及實現方式
考慮使用創(chuàng)科圖像處理軟件的主要目的是為了解決分選設備對帶墨點芯片的識別問題。軟件設計時采用將CKVision 的目標定位功能和灰度判定功能疊加使用來解決該問題。先設置模板輪廓線圖像如圖5所示,再設置灰度分析范圍矩形框如圖6所示,即在設置模板的過程中不但采集了芯片的特征線同時也設置了灰度分析范圍。在識別時先通過輪廓匹配功能來完成對芯片特征的匹配,再對通過特征匹配的芯片采用灰度值統(tǒng)計功能對其需要灰度判定的區(qū)域進行灰度分析,最終根據灰度分析結果來確定芯片上是否有墨點,從而實現對芯片好壞的識別。

圖5 模板輪廓線
考慮好對帶墨點芯片的識別問題后再分析設備對圖像處理軟件的需求,總結為:

圖6 灰度分析范圍矩形框
(1)顯示功能
◇顯示窗口的創(chuàng)建
◇采集圖像
◇圖像縮放顯示
◇圖像居中顯示
◇畫直線標示線
◇畫十字標示線
◇畫矩形顯示框
(2)識別功能
◇學習范圍的設置
◇創(chuàng)建模板
◇編輯模板
◇模板保存
◇模板加載
◇設置模板參數
◇保存模板參數
◇識別方式設置
◇識別范圍設置
根據以上需求最終確定將CKVision 進行二次封裝,封裝為一個動態(tài)鏈接庫,將需要使用的函數按功能進行封,從而方便整機軟件的調用。最終確定的對外接口函數如表1所示。
4 實驗結果
封裝完成的動態(tài)鏈接庫能夠與整機軟件很好地結合,沒有出現錯誤,實驗驗證采用輪廓識別和局部區(qū)域灰度分析的方式很好地解決了設備對墨點的識別。實驗過程及結果分別如圖6、7、8 所示。其中圖7描述了模板參數的設置,識別方式選為輪廓+灰度識別,特征匹配分數閾值為70,定灰度判定值設置為80。
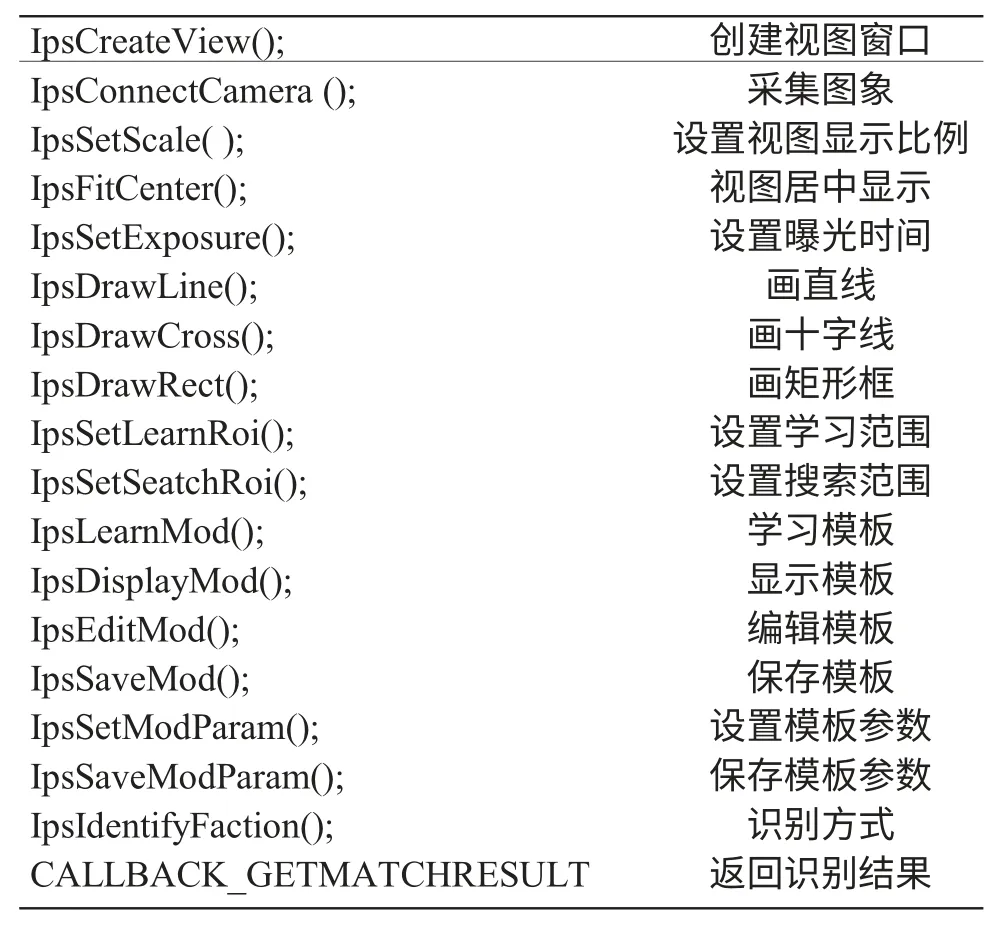
表1 動態(tài)鏈接庫對外接口函數
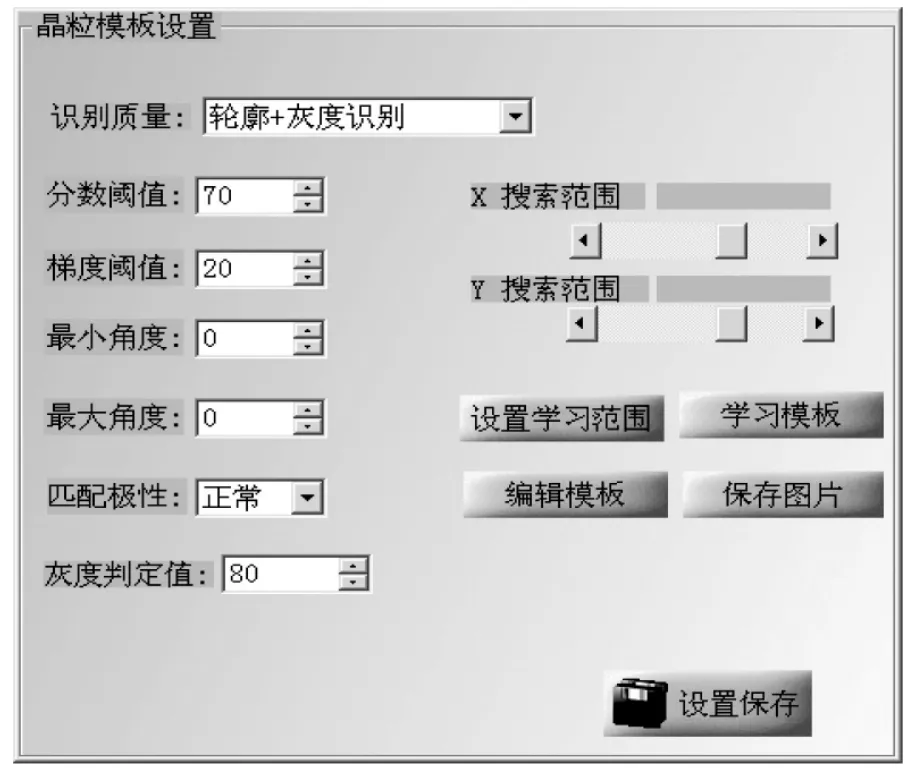
圖7 模板參數
圖8及表2是分別識別6 顆芯片的圖像顯示和數據統(tǒng)計。在圖8中可清晰的看到1、2、3、4號芯片的只有邊框線沒有灰度分析框即為合格芯片,5、6 號芯片的雖然有邊框線但在有墨點區(qū)域卻又灰度分析范圍框即為不合格芯片。從表2的數據統(tǒng)計結果中也可以看出雖然1~6 號芯片的特征匹配結果分數都在設定的分數閾值之上,但5、6 號芯片的灰度判定值小于設定的灰度判定值。

圖8 識別結果圖像
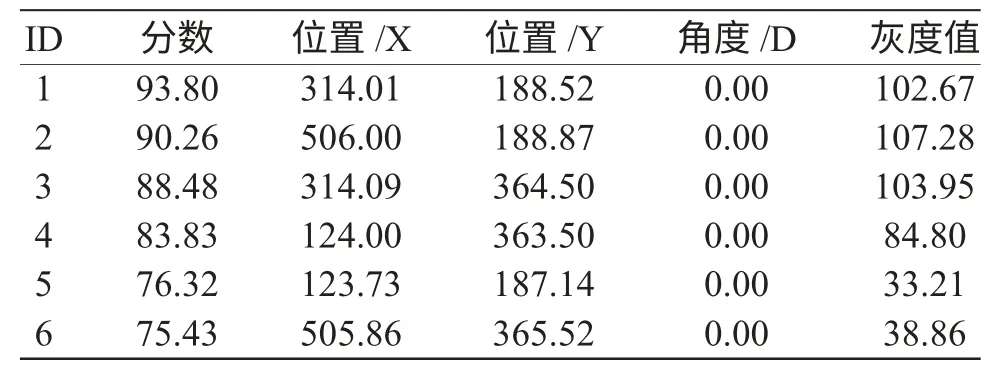
表2 識別結果統(tǒng)計
5 結束語
CKVision 圖像處理使用簡單,二次開發(fā)操作容易,在芯片的識別定位上采用輪廓識別加灰度分析的方式解決了分選設備對帶墨點的芯片識別誤差大的問題。最終成果動態(tài)庫穩(wěn)定,與設備軟件能很好的對接,并已成功在客戶現象投入使用,收到客戶的肯定。
[1]創(chuàng)科自動化控制有限公司.CKVISION 機器視覺軟件開發(fā)包[Z].2012.
[2]創(chuàng)科自動化控制有限公司.CKVISION5.0 函數說明[Z].2012.
[3]阮秋琦阮宇智等譯,數字圖像處理(第二版)[M].北京:電子工業(yè)出版社,2014.
[4]王亮,蔣欣蘭譯,機器視覺[M].北京:中國青年出版社,2014.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
少先隊活動(2021年4期)2021-07-23 01:46:22
電子制作(2018年11期)2018-08-04 03:26:08
中國科技論壇(2017年7期)2017-07-25 08:49:53
工業(yè)設計(2016年12期)2016-04-16 02:52:00
沈陽醫(yī)學院學報(2015年1期)2015-12-27 13:44:40
醫(yī)學教育管理(2015年3期)2015-12-01 06:43:16
消費者報道(2014年7期)2014-07-31 11:23:57
中國中醫(yī)藥現代遠程教育(2014年22期)2014-03-01 04:32:55