平面軌跡機構的靜態綜合可靠性分析
2015-07-18 11:21:57張均富
西華大學學報(自然科學版) 2015年3期
關鍵詞:方法
李 奇, 張均富
(西華大學機械工程學院,四川 成都 610039)
·機電工程·
平面軌跡機構的靜態綜合可靠性分析
李 奇, 張均富*
(西華大學機械工程學院,四川 成都 610039)
傳統的機構運動可靠性研究多以各分量運動誤差來建立機構運動的可靠性分析模型,進而獲得各分量誤差落在允許誤差范圍內的概率。為獲得各分量誤差的綜合效應,將機構運動在每一坐標分量上的失效看作一種失效模式,基于多失效模式提出軌跡機構的綜合運動可靠性分析模型。在各運動分量的相關性分析的基礎上,采用二維正態分布導出各運動分量的聯合概率密度,最后采用數值積分方法求解機構運動綜合可靠度。通過數值實例對該模型的有效性和精度進行驗證,其結果表明,這一模型能夠反映機構在整個運動區間上某指定點處整體失效情況。
運動可靠度;軌跡機構;多失效模式
軌跡再現機構的設計是機構綜合問題的重要內容。近年來,學者們特別關注軌跡機構的綜合模型的建立和其算法的求解[1], 旨在提高機構的運動精度。在確定性條件下,現有機構綜合模型及其求解方法是十分有效的,但在真實機構系統中不確定性是固存的,如尺寸公差、運動副間隙、構件材料與彈性變形等。這些不確定性使機構的真實運動偏離期望運動軌跡,造成機構的運動精度降低、可靠性下降。為提高軌跡生成的精度,應綜合考慮不確定性因素對機構運動的影響。
機構系統中存在的不確定性常看作隨機不確定性。機構運動可靠性理論就是應用概率統計理論研究這些隨機不確定性問題的方法和理論。軌跡機構的運動可靠性問題已被廣泛的研究[2-8],現有方法多數是基于機構輸出點的各運動分量誤差(歐氏誤差)模型提出機構的運動可靠性分析模型。該模型分別求解機構在各運動分量上再現期望軌跡的概率,難以體現機構在運動區間上某指定點處機構的整體失效情況,即機構在該點的綜合可靠度。Zhang等[5]將這種綜合可靠度定義為軌跡機構的系統可靠度,但沒考慮各分量之間的相關性。Huang等[6]采用結構工程領域的系統可靠度分析的矩陣法對軌跡機構系統可靠度的求解進行研究,但得到的可靠度是機構運動可靠度的上下限。在現有文獻中,機構運動可靠度分為點可靠度和時變可靠度[7]。點可靠度研究機構在某時間點處的運動誤差落在許用誤差范圍內的概率,而時變可靠度研究機構在整個指定運動區間上的運動誤差不超過許用誤差的概率。前者為靜態可靠度,后者為動態可靠度[9]。本文將軌跡機構輸出點的每個分量誤差超出允許誤差限看作一種失效模式,以多失效模式建立軌跡型機構的可靠性分析模型,并應用該模型研究求解機構在指定時間點處的靜態綜合可靠度問題。
1 機構運動可靠性模型
圖1為一平面四桿軌跡機構,構件AB為機構的輸入曲柄,θ為曲柄AB相對機架AD的轉角。連桿BC與構件BP固連且夾角為β。φ為機架AD與坐標系x軸的夾角。L1、L2、L3、L4、L5分別為機架AD、曲柄AB、連桿BC、搖桿CD、構件BP的桿件長度。
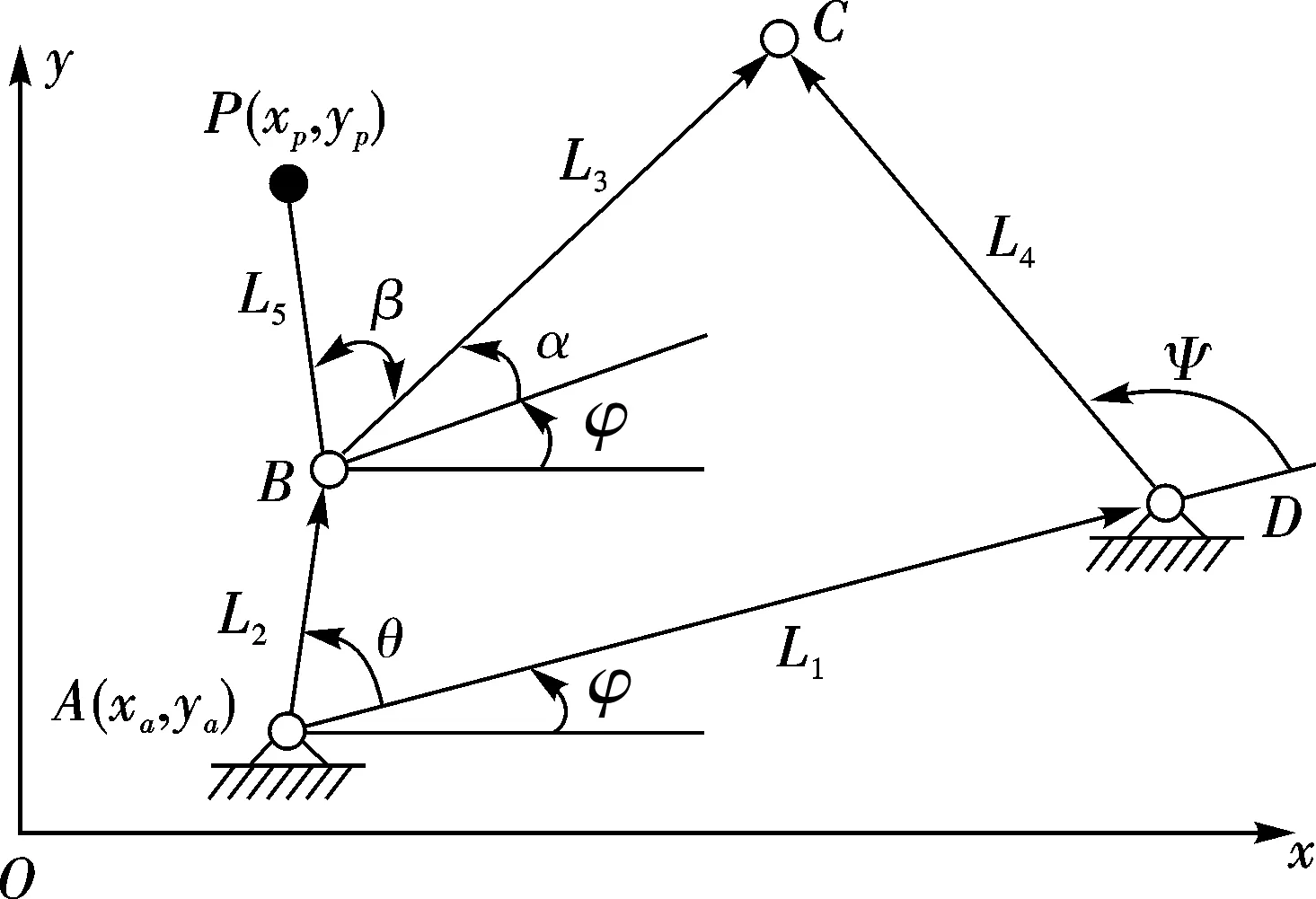
圖1 平面四桿軌跡機構

(1)

(2)
考慮機構系統中的隨機性,即各尺寸參數的制造公差和機構的安裝誤差,則X為隨機向量。傳統研究按各誤差分量形式定義機構的運動可靠性模型,即:
1)在x方向,機構在曲柄轉角θ處的可靠度R1(θ)為

(3)
2)在y方向,機構在曲柄轉角θ處的可靠度R2(θ)為

(4)
式中,ε為機構的運動誤差限。
上述可靠性模型僅能反映機構運動誤差分量落在允許誤差范圍內的概率。在機構的不確定性(概率)綜合時,人們更多地關注機構在曲柄轉角θ處各誤差的綜合效應,即機構的運動誤差分量同時落在允許誤差范圍內的概率。為此,可將各運動分量的失效看作一種失效模式,基于多失效模式定義機構運動可靠性模型,為

(5)
式(5)中,由于同時考慮了機構運動在坐標x、y方向上的誤差,因此稱其為機構在曲柄轉角θ處的綜合可靠度。
2 機構運動可靠性分析
2.1各分量可靠性分析
假定各隨機變量服從正態分布,即X~N(μX,σX),且假定σX相對于μX非常小,則式(3)(4)定義的運動可靠度可由一次二階矩方法(FOSM)高精度求解,即

(6)
對應的機構運動精度失效概率為
pfi(θ)=1-Ri(θ)。
(7)
式中,μi(X,θ)、σi(X,θ)(i=1,2)分別表示機構運動誤差函數gi(X,θ)的均值和均方差。
根據FOSM 方法,μi(X,θ)、σi(X,θ)可由運動誤差函數gi(X,θ)在X的均值處線性展開獲得,用泰勒公式線性化gi(X,θ)可得
(8)
作變換Xj=μXj+σXj·Uj,其中Ui~N(0,1),于是,式(8)可改寫為
(9)

μi(X,θ)=b0i;
(10)
σi(X,θ)=‖bi‖。
(11)
式中bi=[bi1,bi2,…,bin]。
2.2綜合可靠性分析
σ12(X,θ)=E[(g1(X,θ)-μg1(X,θ))(g2(X,
θ)-μg2(X,θ))]。
(12)
將式(9)帶入式(12)得到
σ12(X,θ)=b1·b2。
(13)
式中,b1=[b11,b12,…,b1n],b2=[b21,b22,…,b2n]。
由此寫出g1(X,θ)與g2(X,θ)的相關系數
(14)

(15)

3 實例分析
以圖1所示平面四桿機構為例再現期望軌跡,如表1所示。為簡化,將機架桿1的方位角φ、輸出桿5與連桿3的夾角β、鉸鏈點A的坐標處理為確定性參數,機構桿長尺寸作為隨機變量,即X=(L1,…,L5)。各尺寸變量均服從正態分布,其均指為μX=(79.516 1,9.724 0,45.842 5,51.432 8,8.728 9),變異系數C=0.01,確定性變量φ=5.596 9 rad,β=-0.345 2 rad,鉸鏈A的坐標(xa,ya)=(2.021 1,13.216 6)。機構運動輸出允許的誤差限ε=0.07。
由圖1知,機構輸出點P的軌跡坐標為:
(16)
連桿3的轉角α可由機構環路方程式求解。機構環路方程式為:
(17)
根據式(17),連桿轉角α為
(18)

機構運動可靠度的求解流程如下。
1)根據式(16)~(18)對機構進行運動學分析,獲得機構的實際輸出軌跡。
2)根據式(16)和(17),應用直接線性化方法可以得到誤差傳遞系數bi(i=1,2),進而獲得gi(X,θ)的均值、均方差,以及g1(X,θ)與g2(X,θ)的相關系數。
3)根據式(6)和(7)求解機構各運動輸出分量的可靠度或失效概率。
4)根據式(15)求解曲柄轉角θ處的機構運動綜合可靠度。
結合上述流程與方法,對實例進行分析得到機構的運動可靠度,如表2所示。為驗證前述方法的精度,將蒙特卡洛方法(MCS)的計算結果作為精確值(其仿真次數為108)與本文方法進行比較。可以看出,各分量失效概率和綜合失效概率與蒙特卡洛結果非常接近,由此驗證了前述近似計算方法的有效性和精確性。
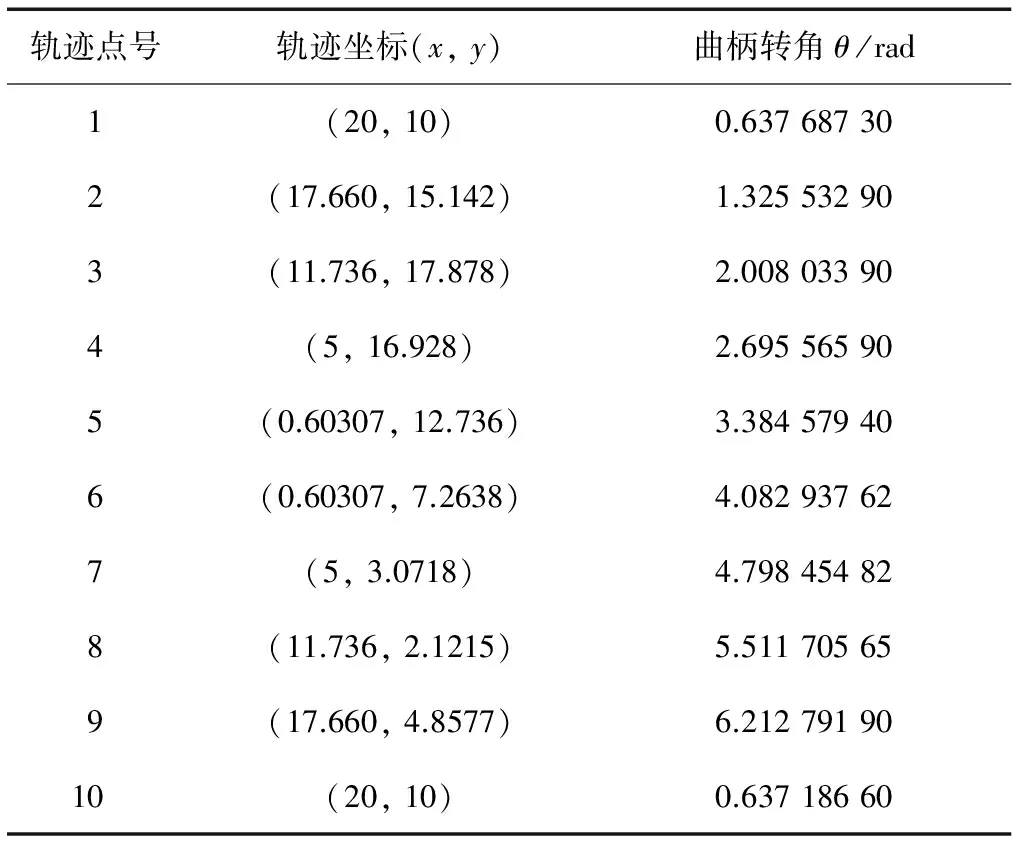
表1 機構期望再現軌跡

表2 機構的運動可靠度
4 結論
現有平面軌跡機構的不確定性研究多以機構各坐標分量上的運動誤差為基礎建立各運動分量可靠性分析模型。該模型不能很好地反映機構的整體運動失效情況。本文將機構在每一坐標分量上的運動看作一種失效模式,基于多失效模式提出軌跡機構的綜合運動可靠性分析模型。在各運動分量的相關性分析基礎上,采用二維正態分布導出了各運動分量的聯合概率密度,最后采用數值積分方法求解機構運動綜合可靠度。數值實例分析結果表明,本文所提出的基于各分量聯合概率密度的數值積分法的求解結果非常接近蒙特卡洛方法的結果,而且該方法具有較高求解精度和較小的計算代價(與蒙特卡洛方法相比,在每個時間點上本方法僅調用1次機構分析程序,而蒙特卡洛方法調用108次)。此外,所提出的可靠性分析模型能夠反映機構在整個運動區間上某指定點處整體失效情況,或者說反映了機構在某指定點能夠再現期望軌跡的整體概率和能力。本文提出的可靠性分析模型及求解算法適用于軌跡機構運動可靠性分析,能全面、直觀地反映機構的整體運動狀況和再現軌跡的精度。
[1]Sanjay B Matekar, Gunesh R Gogate. Optimum Synthesis of Path Generating Four-bar Mechanisms using Differential Evolution and a Modified Error Function[J]. Mechanism and Machine Theory, 2012, 52(6):158-179.
[2]Liu T S, Wang J D. A Reliability Approach to Evaluating Robot Accuracy Performance[J].Mechanism and Machine Theory, 1994, 29(1): 83-94.
[3]Shi Z X. Synthesis of Mechanical Error in Spatial Linkages Based on Reliability Concept[J].Mech Mach Theory, 1997, 32(2): 255-259.
[4]Bhatti P K , Rao S S . Reliability Analysis of Robot Manipulators[J].Journal of Mechanisms, Transmissions, and Automation in Design, 1998, 110:175-181.
[5]Zhang Y, Huang X, Zhang X, et al. System Reliability Analysis for Kinematic Performance of Planar Mechanisms[J].Chinese Science Bulletin, 2009, 54(14): 2464-2469.
[6]Huang Xianzhen, Zhang Yimin. Probabilistic Approach to System Reliability of Mechanism with Correlated Failure Models[J].Mathematical Problems in Engineering,2012, ID 465853, 11 pages.
[7]張均富,龍進.不確定性下平面四桿轉向機構的運動精度分析[J].西華大學學報:自然科學版,2011,30(3):17-20.
[8]張均富,梁麗,宋玉忠,等.平行直動推桿傳動強度可靠性設計[J].西華大學學報:自然科學版,2005,24(3):58-59.
[9]Zhang J,Du X. Time-dependent Reliability Analysis for Function Generator Mechanisms[J].Journal of Mechanical Design, 2010, 133 (3): 031005- 031014.
(編校:饒莉)
StaticCompositeReliabilityofPlanarPathMechanisms
LI Qi, ZHANG Jun-fu*
(SchoolofMechanicalEngineering,XihuaUniversity,Chengdu610039China)
In traditional probabilistic mechanism analysis, reliability analysis model of path generating mechanisms is set up with motion error of each coordinate.Because these kinds of mechanisms have multiple motion output components. The probability that a mechanism realizes its desired motion within a specified error is then calculated. In this work, each component of motion is taken as a failure mode and the kinematic reliability analysis model of path generating mechanisms is proposed with multiple failure modes in order to obtain the comprehensive effect of component errors. Based on statistical correlation analysis of failure events, the joint probability density function of each motion error is obtained by using two-dimensional normal distribution. The kinematic reliability is then calculated with the numerical integration method. The method is demonstrated by the analysis of a four-bar path generating mechanism.This model can provide a global failure of probability at a specified point during the motion interval.
kinematic reliability; path mechanisms; multiple failure modes
2014-06-24
國家自然科學基金資助項目(51275425);教育部“春暉計劃”資助項目(z2011081)。
:張均富(1972—),男,教授,博士,主要研究方向為機構概率設計、機器人機構學。
TH112;TH115
:A
:1673-159X(2015)03-0017-04
10.3969/j.issn.1673-159X.2015.03.004
*
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56