
多傳感器數據融合技術研究與展望
2015-07-18 13:08:22周鵬
物聯網技術 2015年5期
周鵬
摘 要:多傳感器數據融合是近年來的一個熱點研究方向,具有廣闊的應用前景。介紹了數據融合的概念與主要特點,總結了常用的數據融合過程與系統結構,以及幾種經典的多傳感器數據融合算法,介紹了多傳感器數據融合技術的應用方向,并對未來的技術發展方向進行了展望。
關鍵詞:多傳感器;數據融合;結構;算法
中圖分類號:TP274 文獻標識碼:A 文章編號:2095-1302(2015)05-00-03
0 引 言
隨著電子信息技術的快速發展,各種大型電子系統不斷涌現,其應用背景不斷趨于復雜化,其功能實現需要各種多傳感器數據系統支持,因此需要對各種不同的傳感器和不同的信息源進行更加有效的融合集成。同時,隨著現代戰爭的發展,多傳感器數據融合技術在軍事方面的作用愈加凸顯,它結合利用了多種不同傳感器的特點,可以多方位多角度獲取目標不同類型的信息,提高C3I系統在各維度上的覆蓋范圍,提高對目標的檢測和識別能力[1]。經過多年發展,多傳感器數據融合技術已取得了長足的進步。在融合層級方面,形成了數據級融合、特征級融合與決策級融合三種層級。在系統結構方面,提出了集中式、分散式、分布式和混合式結構;在融合算法方面形成了加權平均方法、神經網絡法、Kalman濾波法、貝葉斯估計法、D-S證據理論等算法。在應用方面,多傳感器數據融合已廣泛應用于軍用和民用領域并取得了顯著的效果。本文介紹了多傳感器數據融合的過程和主要特點,總結了常用的數據融合系統結構與算法,概括了多傳感器數據融合技術的應用情況,并針對現存問題對未來技術發展方向進行了展望。
1 融合模型
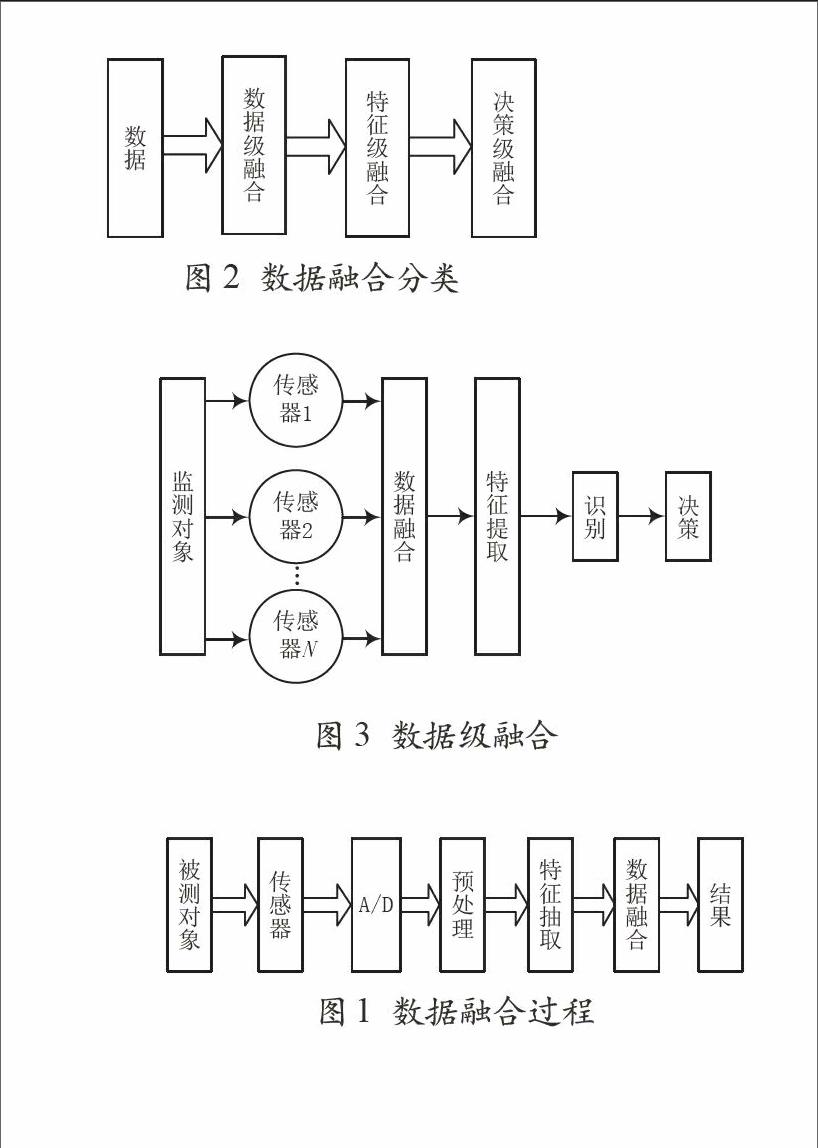
1.1 多傳感器數據融合的一般過程
多傳感器數據融合的一般過程大致如圖1所示,首先傳感器將測量環境中的被測對象轉換為電信號,然后經過A/D變換將電信號轉換為數字信號。數字信號經過預處理濾除干擾和噪聲,再經過特征抽取后進行數據融合,最后輸出融合結果。
圖1 數據融合過程
1.2 多傳感器數據融合的類別
數據融合通常可以根據處理階段層次的不同分為數據級融合、特征級融合與決策級融合[2],如圖2所示。
圖2 數據融合分類
(1)數據級融合
數據級融合是在各傳感器原始數據的基礎上進行的底層融合,如圖3所示。數據級融合的優點是能夠盡可能多地保持原始數據中的信息;缺點是數據量大、運算開銷大,同時原始數據具有不確定性和不完全性。
圖3 數據級融合
(2)特征級融合
特征級融合指的是首先對各個傳感器的原始信息進行特征提取,然后再對特征信息進行融合的處理過程。特征級融合的優點在于通過對各傳感器原始數據的處理實現了信息優選,降低了實時處理的壓力。特征級融合是目前在實時系統中應用最為廣泛的融合方式。特征級融合如圖4所示。
(3)決策級融合
決策級融合的融合對象是對目標特征進行識別后的決策信息,直接為指揮控制決策提供依據,屬于高層級融合。所以決策級融合應該從具體問題的需求出發,充分利用數據級融合和特征級融合所產生的目標的各類特征信息,利用一定的算法來實現。決策級融合的優點:實時性好、能有效反映出目標各不同類型的信息、具有一定的容錯性,對傳感器的依賴降低,具有較高的靈活性。決策級融合如圖5所示。
圖4 特征級融合
圖5 決策級融合
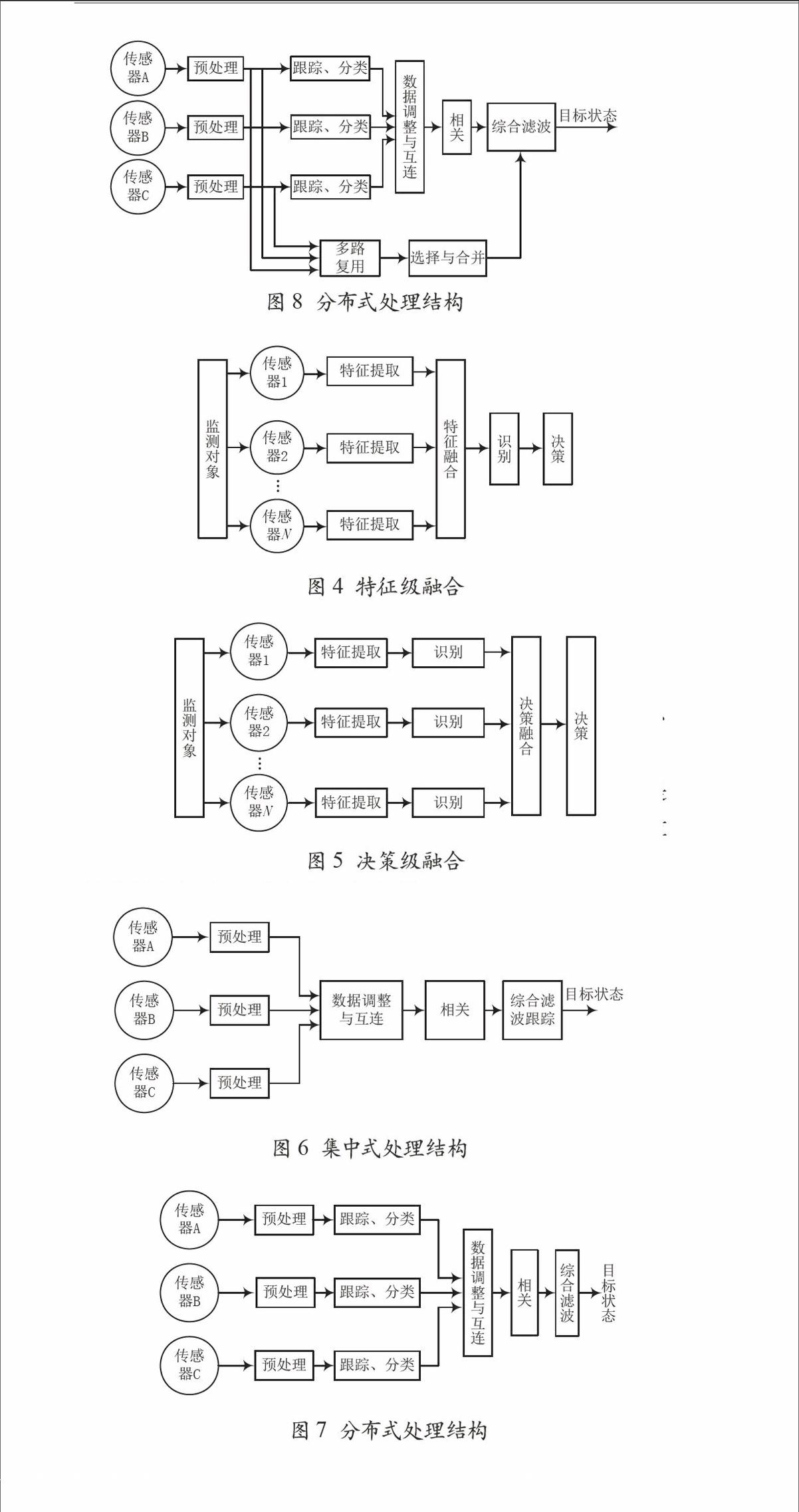
1.3 數據融合的處理體系結構
多傳感器數據融合處理在實現過程中通常具有分布式、集中式和混合式三種體系結構[3]。
集中式結構適合處理來自傳感器的原始數據,其優點是數據信息損失較小,但對系統通信能力要求較高,融合計算的負擔較重。集中式結構如圖6所示。
圖6 集中式處理結構
分布式結構適合處理的是經過一定預處理流程的數據,其特點是代價較低、通信量較小等。分布式結構如圖7所示。
圖7 分布式處理結構
混合式結構在實際應用中,常常采用混合式系統結構。混合式的融合系統保留了前兩種系統的優點,但是其在通信和計算中代價較大。分布式結構如圖8所示。
圖8 分布式處理結構
1.4 融合方法
在多傳感器數據融合系統中,需要大量采用各種數據融合方法對系統中的各類傳感器數據進行有效處理。根據不同的應用背景需求,多傳感器數據融合算法也多種多樣,主要的融合方法有[4]:
(1)加權平均法
加權平均方法是最簡單的數據融合算法,該方法對傳感器數據進行加權平均,即得到融合結果。
(2)神經網絡法
基于神經網絡的多傳感器數據融合算法通過利用大量具有非線性映射關系的神經元將數據信息轉換為知識庫;同時,可以自動進行知識獲取及聯想推理,能夠將不確定的復雜數據經過學習與推理融合為系統能處理的數據。同時,神經網絡可以大規模并行處理信息,處理速度較快。
(3)Kalman濾波法
Kalman濾波也是一種應用很廣的數據融合方法。經典的Kalman濾波算法能在線性系統且誤差為高斯白噪聲模型的情況下得到統計意義下的唯一最優估計值。擴展的Kalman濾波算法與基于強跟蹤的Kalman濾波可應用于非線性系統及系統模型或系統狀態有變化的情況。
(4)貝葉斯估計法
貝葉斯估計法也是數據融合中一種常用方法,通過使用概率密度函數表示源信息,對融合信息進行優化處理,使傳感器信息按概率關系組合,以條件概率表示其測量不確定性。
(5)D-S證據理論
D-S證據理論是貝葉斯估計法的擴展。貝葉斯估計法需要事先給出先驗概率,而D-S證據理論則能夠在缺乏先驗信息的條件下使信息明朗化,是一種不精確推理理論。
2 多傳感器數據融合的應用情況
多傳感器數據融合應用分為軍用和民用兩大類[5]。
在軍事領域中,多傳感器數據融合廣泛用于各種軍事目標的探測、定位與跟蹤識別。上世紀70年代美軍就開發了具有數據融合功能的聲納信號處理系統,上世紀80年代美國將C3I系統中的數據融合技術列為重點開發的二十項關鍵技術之一,1991年美國已將五十多個數據融合系統引入到軍用電子系統中。
民用領域的應用主要有智能機器人、智能制造、智能交通、醫療診斷、遙感、刑偵和保安等。智能機器人可以代替人進行智能加工、狀態監測和故障診斷等;在智能交通系統中可以實現交通工具的無人駕駛;在醫療診斷中將多傳感器的數據融合可以得到更準確的診斷結果;在遙感領域中可以通過融合遙感圖像來提高分類的準確性;在刑偵中可以利用多傳感器數據進行武器、毒品等的檢查并將人體的各種生物特征融合,大幅度提高對人的身份識別認證能力。
3 研究展望
多傳感器數據融合技術已經成功地應用于軍民多種領域,但仍有大量理論和實際問題需要解決。
(1)多源異類傳感器信息融合技術。多源異類多傳感器信息融合具有很大難度,如何利用各個不同種類傳感器的位置、動態及特征和屬性參數,聯合優化目標檢測跟蹤性能是需要進一步研究的問題。
(2)傳感器資源分配和管理研究。包括根據傳感器性能、位置和工作時間、探測范圍等研究多傳感器的資源組合和任務分配以及控制策略等。
(3)系統評估方法。需要研究建立實用地評估體系,包括系統指標體系和算法體系,從而對整個融合過程進行實驗分析和比較研究。
(4)網絡化復雜融合系統的研究。對于目前在軍事信息領域以及民用的金融證券等領域,僅靠單一的融合系統不能解決問題。如何在網絡環境下,結合大數據、云計算、物聯網等新技術對多傳感器數據進行挖掘和融合形成決策,是下一步需要研究的重點問題。
4 結 語
本文通過對現有數據融合過程和主要特點進行總結,對一些經典的多傳感器數據融合算法和數據融合技術的應用情況進行了介紹,并對未來的發展方向做出展望,為廣大科研工作者在數據融合方面進行進一步的研究提供了參考和借鑒。
參考文獻
[1]何友,關欣,王國宏. 多傳感器信息融合研究進展與展望[J].宇航學報,2005,26(4):524-529.
[2]黃漫國,樊尚春,鄭德智,等. 多傳感器數據融合技術研究進展[J]. 傳感器與微系統,2010,29(3):5-8.
[3]潘泉,于昕,程詠梅. 信息融合理論的基本方法與進展[J].自動化學報,2003,29(4):599-615.
[4]王欣. 多傳感器數據融合問題的研究[D].長春:吉林大學,2006.
[5]田雪怡. 多傳感器數據關聯與航跡融合技術研究[D].哈爾濱:哈爾濱工程大學,2012.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
現代電子技術(2015年14期)2015-07-22 22:03:52
