基于多傳感器數據融合的助行機器人防摔倒技術研究
2015-07-22 22:03:52張玉葉
現代電子技術 2015年14期
關鍵詞:多傳感器
張玉葉
摘 要: 助行機器人為行動不便的老年人提供了身體支撐和行走輔助。在此設計的助行機器人防老年人摔倒系統將人體在站立、行走、摔倒等狀態所獲得的觸滑覺信號、角速度信號、加速度信號作為神經網絡的訓練樣本和試驗樣本。首先在信息層將一種傳感器采集的單一信號送入局部決策器,進行局部處理后再送入融合中心綜合決策,形成多傳感器數據融合的防摔預測研究,并進行了相關仿真。仿真結果表明該系統可靠,對實現滿足老年人在戶外獨立、安全行走需求的機器人開發提供理論及實驗依據。
關鍵詞: 助行機器人; 多傳感器; 數據融合; BP神經網絡
中圖分類號: TN302?34; TP301.6 文獻標識碼: A 文章編號: 1004?373X(2015)14?0036?03
0 引 言
中國人口老齡化形勢嚴峻,甚至世界人口正在走向老齡化。可以預計,在不遠的將來,老年人的護理將成為社會的一個重要負擔;而且,可以作為保姆角色的為老年人和殘疾人提供看護的人員也會非常短缺,甚至沒人愿意從事這個方面的工作;所以,老齡化問題所涉及的醫療和社會保險體系也面臨巨大的壓力,助老問題正日益成為一個重大的社會問題;尤其是近年來,腦卒中發病已呈“井噴”態勢。根據最新統計,2012年我國腦卒中患病率達1.82%,估算我國40歲以上的腦卒中患者達1 036萬人。腦卒中患者大多會留下步履蹣跚,動作不協調的后遺癥。對此運用Bobath技術、Brunnstrom技術,神經肌肉本體促進技術等,幫助患者恢復肌體功能,早日回歸家庭和社會。腦卒中患者主動訓練過程中意外傷害的首要原因是摔倒,意外失足或者某種疾病突然發作及惡化很可能引起跌倒;在發生跌倒事件后,如得不到及時救護,延誤救助時機將危機生命。因此,研制開發專為老人服務的產品——防老年人摔倒的助行機器人,在不影響老年人的正常生活情況下,準確地將摔倒事件與日常生活事件區分開來,并且在發生摔倒事件時,及時的報警聯系救護,這對于提高老年人的生活質量,提高醫療工作的效率,促進我國社會的穩定具有重要作用[1?3]。
1 多傳感器數據融合防摔技術
1.1 多傳感器數據融合的摔倒預測
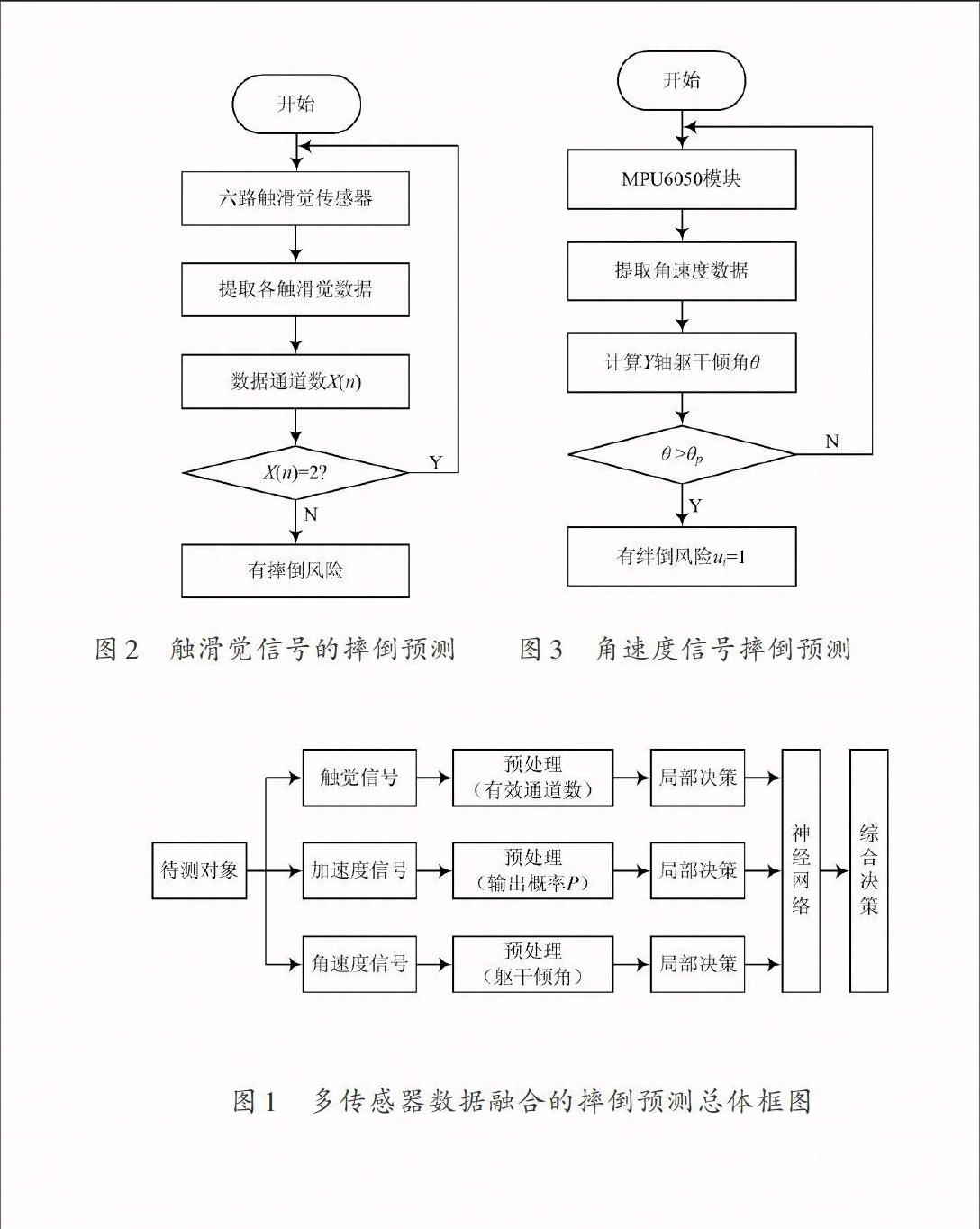
多傳感器數據融合摔倒預測的主要思想是:設計基于決策層信息融合的摔倒預測系統,即對每個傳感器所采集的信息先局部決策,再利用局部決策信息進行全局融合,總體思路框圖如圖1所示。
圖1 多傳感器數據融合的摔倒預測總體框圖
1.2 樣本提取與預處理[4?5]
使用機器人過程中,取站立、行走、摔倒等狀態所獲得的觸滑覺信號、加速度信號、角速度信號作為神經網絡的訓練樣本和試驗樣本。其中觸滑覺信號的獲取是使用助行機器人時各個狀態的觸滑覺傳感器數據。數據提取的有效信號通道數作為觸滑覺信號樣本。角速度信號的獲取是采集各狀態的角速度數據。
在計算x,y,z軸的軀干傾角時,由于y軸軀干傾角變化明顯,所以選取y軸數據作為角速度信號樣本。加速度信號的獲取是采集摔倒過程的加速度值組成的加速度時間序列,訓練隱馬爾可夫模型,獲取助行時的各運動狀態的加速度值組成加速度時間序列,通過已訓練的HMM得到輸出概率P作為樣本。
1.3 局部決策處理[6?7]
摔倒預測融合系統首先在信息層將一種傳感器采集的單一信號送入局部決策器,進行局部處理,再送入融合中心綜合決策。多傳感器數據預處理后的值組成一向量為:
[X(n)=[x1(n),x2(n),x3(n)]]
式中:[x1(n),x2(n),x3(n)]分別為有效信號通道數、加速度時間序列的輸出概率P和軀干傾角;局部決策結果[ui=f[xi-STDi]]。其中:[u1=f[x1-STD1]],[f(?)]為階躍函數。當局部決策結果[ui]任意一個為1時,則提醒融合中心對3個傳感器的信息進行數據融合得出是否有摔倒傾向。
這種方法具有兩個優點:其一是局部決策沒有異常時不送入融合中心,減輕融合中心數據處理工作量;其二是一旦有異常就進行數據融合檢測摔倒傾向,最大限度的實現摔倒的預測。
1.3.1 基于觸滑覺信號的摔倒預測
助行機器人觸滑覺扶手上有6個觸滑覺傳感器。一般在正常行走時有2個有效信號通道數。人在摔倒時可能出現手脫離扶手,此時信號通道數為0;或者本能的緊握住扶手,則出現多個信號通道數。算法流程如圖2所示。
1.3.2 基于角速度信號的摔倒預測
軀干傾角報警門限STD[θp]的選取方法:取摔倒行為過程中合加速度曲線距離第一次峰值300 ms時的軀干傾角作為集合;選取日常行走過程數據樣本軀干傾角為集合,使用SVM算法進行分類。特征空間維數為 n=1。最優分類界面實質上是一個點,即[y=b]。通過SVM計算得最優分類超平面[θp=28.3°],算法流程如圖3所示,其中[θp]為軀干傾角閾值,運用SVM支持向量機對摔倒行為和行走行為進行分類,取最優分類界面上的值作為傾角閾值[8?9]。
1.3.3 基于加速度信號的摔倒預測
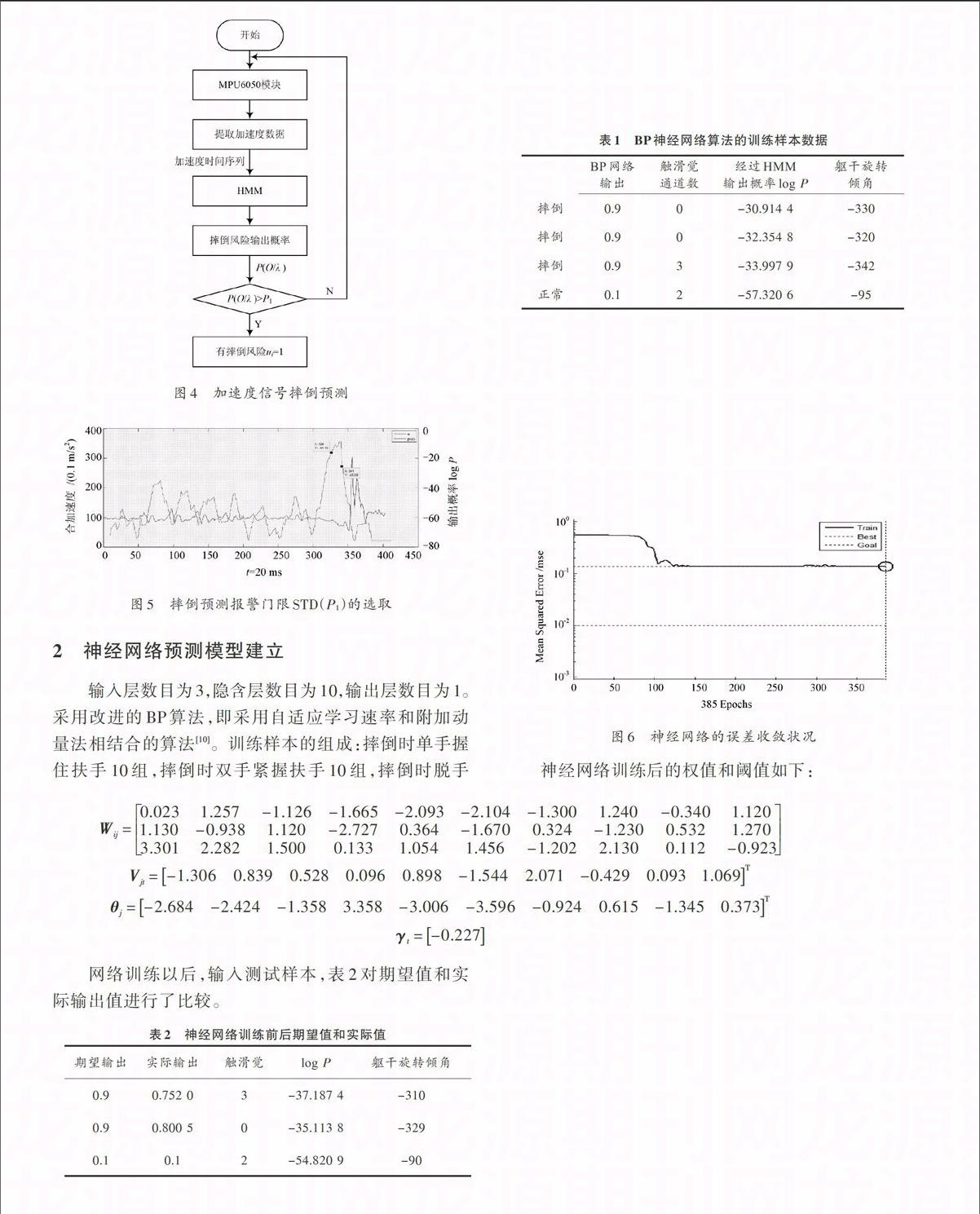
基于加速度信號的摔倒預測算法流程如圖4所示。閾值P1的選擇應該位于日常生活中對HMM模型λ的輸出概率最高值,與摔倒運動過程對HMM模型λ的輸出概率的最低值之間。
經過多次實驗數據仿真得到加速度曲線和輸出概率曲線,如圖5所示。由仿真結果可以看出,選擇[log P1=-25]。
1.4 決策層的數據融合實現
融合中心采用BP神經網絡,在此設計BP神經網絡的結構、選取網絡參數和算法。利用訓練樣本訓練BP神經網絡。網絡結構采用3層BP神經網絡。輸入層分別是歸一化的觸滑覺信號、歸一化的加速度信號和歸一化的角速度信號。
隱蔽層數目的選取可按下面經驗公式獲得[nH=nI+no+n,]根據公式取[nH=10],輸出層有2個神經元,對應摔倒的概率和安全的概率。采用改進的BP算法,即采用自適應學習速率和附加動量法相結合的算法。
圖4 加速度信號摔倒預測
圖5 摔倒預測報警門限STD(P1)的選取
2 神經網絡預測模型建立
輸入層數目為3,隱含層數目為10,輸出層數目為1。采用改進的BP算法,即采用自適應學習速率和附加動量法相結合的算法[10]。訓練樣本的組成:摔倒時單手握住扶手10組,摔倒時雙手緊握扶手10組,摔倒時脫手10組,正常行走10組。其中摔倒的數據采用的是在摔倒與地面沖擊前300 ms的,軀干傾角值和經過HMM輸出的概率值及觸滑覺信號狀態。BP網絡輸出值,摔倒時為0.9,正常時為0.1。訓練樣本部分數據表1所示。
表1 BP神經網絡算法的訓練樣本數據
利用Matlab神經網絡工具箱對訓練樣本進行訓練,在多次仿真實驗后得到較好的實驗結果,神經網絡的誤差收斂狀況見圖6。樣本集當中一般很少出現互反的樣例,不然樣本集就有問題了。神經網絡學習算法本來就是不穩定的,這與訓練樣本有很大的關系,從圖6的神經網絡誤差曲線的收斂狀況來看,訓練樣本集的選取以及改進的神經網絡算法基本合理。
圖6 神經網絡的誤差收斂狀況
神經網絡訓練后的權值和閾值如下:
網絡訓練以后,輸入測試樣本,表2對期望值和實際輸出值進行了比較。
表2 神經網絡訓練前后期望值和實際值
4 結 論
步履蹣跚的老年人以及腦卒中患者步態訓練時都離不開助行機器人,防摔系統將人體在站立、行走、摔倒等狀態所獲得的觸滑覺信號、加速度信號、角速度信號作為神經網絡的訓練樣本和試驗樣本,首先在信息層將一種傳感器采集的單一信號送入局部決策器,進行局部處理后再送入融合中心綜合決策,形成多傳感器數據融合防摔預測研究,滿足老年人在戶外獨立、安全行走的需求;并且對所采用的防摔倒預測方法進行了算法樣本的提取與試驗,關鍵點進行了仿真。仿真結果顯示:所采用的訓練樣本集的選取以及改進的神經網絡算法基本合理有效,從神經網絡訓練前后期望值和實際輸出值比較結果來看BP神經網絡訓練算法有效。
參考文獻
[1] 魏曉娟.一種觸滑覺控制的助行服務機器人[J].電子世界,2014(3):80?81.
[2] 馬培錚.老齡社會背景下智能家庭機器人系統的必要性研究[J].現代家電,2012(20):42?43.
[3] 王云霞,張小棟.一種福利友好的助行機器人設計[C]//2008年第三界北京國際康復論壇論文集.北京:中國康復醫學會, 2008:673?677.
[4] 常曉軍.老年人群意外跌倒過程中的身體姿態感知技術研究[D].西安:西北大學,2011.
[5] 薛源,高向陽.基于多傳感器信息融合的跌倒監測系統設計[J].武漢理工大學學報:信息與管理工程版,2011,33(5):712?716.
[6] 吳艷.多傳感器數據融合算法研究[D].西安:西安電子科技大學,2003.
[7] 牟文杰,葉凌云.基于多傳感器融合的車載航位推算系統[J].傳感器與微系統,2015,34(1):94?96.
[8] 陳貴亮,李長鵬,劉更謙.下肢外骨骼康復機器人的自適應控制研究[J].制造業自動化,2012(24):5?9.
[9] 金純,伊遠陽.一種基于統計學判別分析的老人摔倒檢測算法[J].計算機應用研究,2014,31(1):90?91.
[10] 崔翰文,欒石圳南,李遠帆,等.空巢老人手機用戶的精準識別[J].數學建模及其應用,2014(1):49?51.
[11] 李松,羅勇,張銘銳.遺傳算法優化BP神經網絡的混沌時間序列預測[J].計算機工程與應用,2011(29):53?55.
猜你喜歡
價值工程(2017年9期)2017-04-18 10:15:13
電腦知識與技術(2017年4期)2017-04-10 07:18:48
電子技術與軟件工程(2016年16期)2017-03-17 00:34:04
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
物聯網技術(2015年5期)2015-07-18 13:08:22
現代電子技術(2014年24期)2014-12-18 11:53:51
