基于路面特征系數(shù)的路面識別方法研究
2015-07-19 09:54:48張曉龍孫仁云劉長偉葛恒勇
中國測試 2015年8期
關(guān)鍵詞:特征
張曉龍,孫仁云,劉長偉,葛恒勇
(西華大學(xué)交通與汽車工程學(xué)院,四川成都610039)
基于路面特征系數(shù)的路面識別方法研究
張曉龍,孫仁云,劉長偉,葛恒勇
(西華大學(xué)交通與汽車工程學(xué)院,四川成都610039)
要使汽車制動時能夠充分利用路面的附著條件,需要對當(dāng)前路面進行識別,同時根據(jù)識別結(jié)果實時調(diào)整系統(tǒng)的目標(biāo)滑移率。在Burckhardt輪胎-路面模型基礎(chǔ)上,引入“路面特征系數(shù)”的概念(它表示路面附著系數(shù)與附著系數(shù)曲線斜率之和),給出7種典型路面的路面特征系數(shù)曲線,建立動態(tài)識別區(qū)間,據(jù)此在制動過程中實現(xiàn)路面的動態(tài)識別。基于單輪車輛模型進行制動仿真試驗,結(jié)果表明該方法能夠迅速準(zhǔn)確地完成路面識別,制動時充分利用路面的附著條件,同時具備自動糾錯功能。
路面識別;路面特征;系數(shù);動態(tài);識別區(qū)間
目前國內(nèi)外有大量關(guān)于路面識別的研究方法。其中通過μ(s)曲線小滑移率階段的斜率進行識別的研究最早,但是需要的數(shù)據(jù)量大,實時性不強[2];有通過傳感器測量路面參數(shù)進行路面識別的方法[3],識別準(zhǔn)確率高,但硬件成本高;也有根據(jù)路面狀態(tài)特征值進行的識別[4],克服了附著系數(shù)波動對識別結(jié)果的影響,識別準(zhǔn)確率高,但對躍變路面的識別有局限性;對車輪振動信號進行小波分析也是一種重要的方法[5-6],無需準(zhǔn)確的輪胎-路面模型,魯棒性好,但頻譜分析量大,實時性不強。
本文提出一種適應(yīng)性較強的識別方法,以路面特征系數(shù)為參數(shù)指標(biāo),在Burckhardt輪胎-路面模型的基礎(chǔ)上建立7種典型路面的動態(tài)識別區(qū)間,制動時通過實時估算路面特征系數(shù)完成路面識別,最后通過計算機仿真驗證該方法的可行性。
1 單輪車輛模型
為了簡化問題,忽略側(cè)向力、空氣阻力以及車輪滾動阻力的影響,假設(shè)路面平直,采用單輪車輛模型進行分析[7],如圖1所示。

圖1 單輪車輛模型
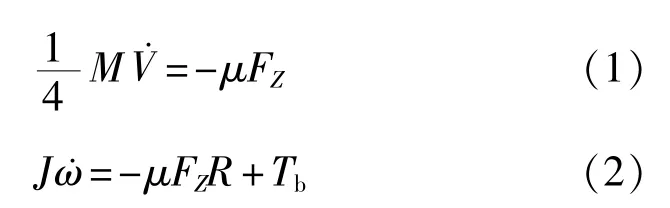
式中:M——車輛的質(zhì)量;
V˙——車輛的減速度;
μ——路面的附著系數(shù);
FZ——車輪受到來自地面的法向作用力,通過加速度傳感器及理論分析可得到;
J——車輪的轉(zhuǎn)動慣量,通常認(rèn)為是常數(shù);
R——車輪的滾動半徑;
ω˙——車輪的角減速度,通過對輪速傳感器測得的車輪角速度差分可得到;
Tb——車輪制動器的制動力矩,可根據(jù)壓力傳感器測得的制動輪缸壓力進行計算[8]。
2 輪胎模型
Burckhardt等通過大量試驗擬合出了各典型路面的μ(s)(附著系數(shù)-滑移率)曲線,給出了一個實用的輪胎-路面數(shù)學(xué)模型,在汽車動力學(xué)研究中應(yīng)用廣泛。其表達式[9]如下:

式中c1、c2、c3為各典型路面的參數(shù)值,通過求極值的方法求出7種典型路面的最佳滑移率s0,見表1。
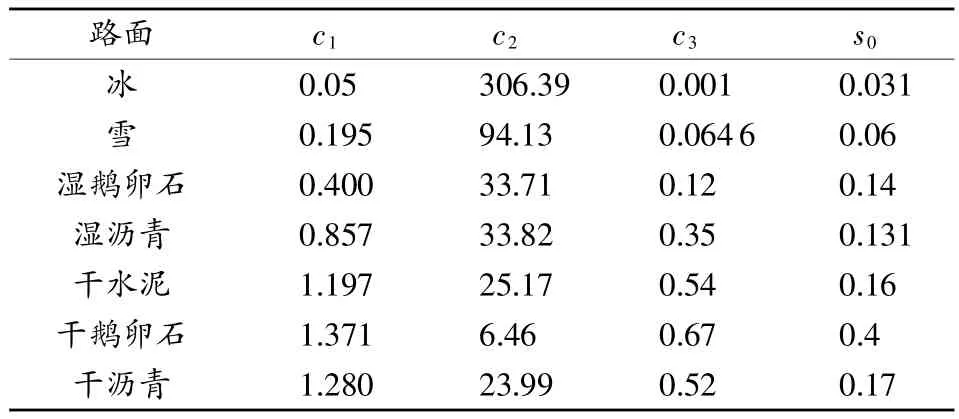
表1 輪胎模型中各典型路面參數(shù)值及s0
根據(jù)表1中不同路面下c1、c2、c3的值得到7種典型路面的μ(s)曲線,如圖2所示,仿真時利用此模型產(chǎn)生路面信號。
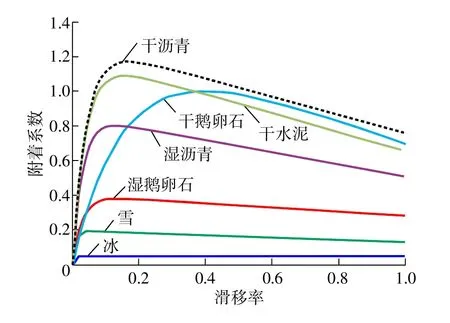
圖2 典型路面的μ(s)曲線
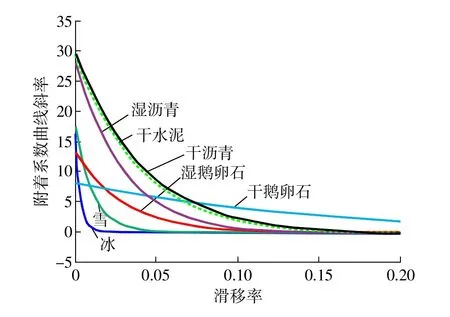
圖3 典型路面的附著系數(shù)曲線斜率-滑移率曲線
3 識別方法
附著系數(shù)和附著系數(shù)曲線斜率是路面識別最常用的參數(shù)指標(biāo),雖然對路面附著系數(shù)和附著系數(shù)曲線斜率的估算方法很多,但最終往往都是將估算值與理論值作比較進行識別。如圖2、圖3所示,各典型路面的附著系數(shù)曲線μ(s)和附著系數(shù)曲線斜率μ˙(s)均出現(xiàn)交叉重疊,個別滑移率下不同路面的附著系數(shù)或附著系數(shù)曲線斜率相等,因此二者單獨作為參數(shù)指標(biāo)進行識別時可能出現(xiàn)錯誤識別。
綜合圖2、圖3可以看出,當(dāng)不同路面的附著系數(shù)相等時其附著系數(shù)曲線斜率必然不等,同樣當(dāng)不同路面的附著系數(shù)曲線斜率相等時其附著系數(shù)必然不等。所以當(dāng)不同路面的附著系數(shù)或附著系數(shù)曲線斜率相等時二者之和必然不等。
本文提出“路面特征系數(shù)”的概念,并將其作為路面識別的參數(shù)指標(biāo),其定義如下:

式中:T(s)——路面特征系數(shù);
μ(s)——路面附著系數(shù);
μ˙(s)——附著系數(shù)曲線斜率。
3.1 典型路面的動態(tài)識別區(qū)間
由式(3)微分得:

由式(3)、式(4)、式(5)得:

根據(jù)式(6)和表1中的參數(shù)值得到7種典型路面的T(s)曲線,如圖4、圖5所示。
當(dāng)滑移率0.09≤s≤0.50時,各典型路面的T(s)曲線沒有出現(xiàn)交叉重疊,差距明顯,易于識別。根據(jù)各典型路面T(s)曲線的特點建立動態(tài)識別區(qū)間,即每個滑移率下對應(yīng)一個識別區(qū)間,制動過程中當(dāng)滑移率變化時,在不同滑移率下系統(tǒng)會對當(dāng)前路面狀態(tài)進行反復(fù)識別,一旦路面發(fā)生躍變或上一個滑移率下出現(xiàn)錯誤識別,下一時刻滑移率變化后會立即作出正確調(diào)整。
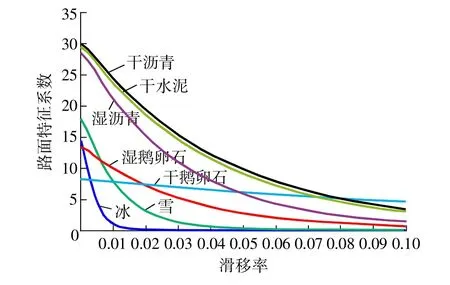
圖4 路面特征系數(shù)-滑移率曲線(0.01≤s≤0.10)
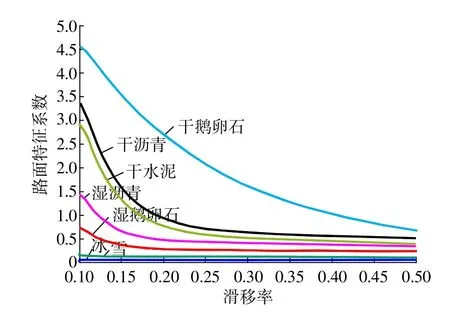
圖5 路面特征系數(shù)-滑移率曲線(0.10≤s≤0.50)
由于路面的識別區(qū)間隨著滑移率的變化而變化,這樣就繪制出來各路面的識別區(qū)間曲線,曲線方程如下:

式中:Li(s)——7條識別區(qū)間曲線;
Ti(s)——7種典型路面的T(s)曲線。
由式(6)、式(7)、式(8)和表1中的參數(shù)值可以計算出各典型路面實時滑移率下對應(yīng)的識別區(qū)間,同時對路面編號,如表2所示。
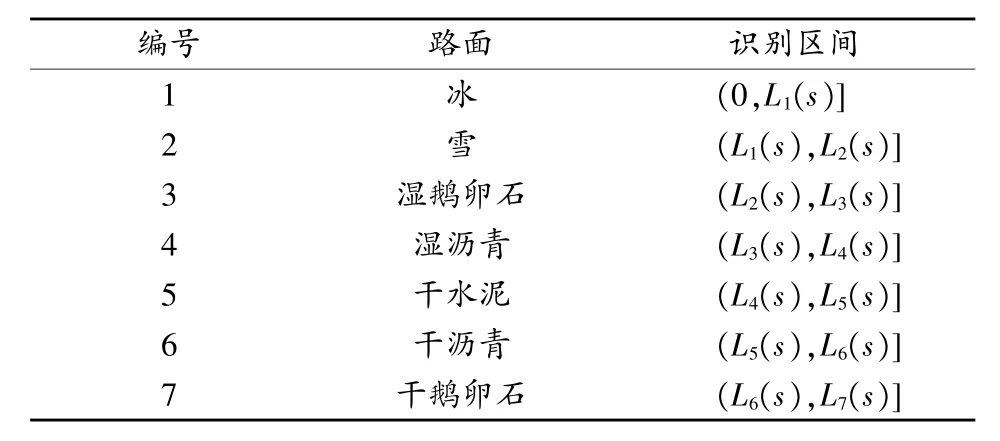
表2 各典型路面的動態(tài)識別區(qū)間
3.2 識別算法
如圖4、圖5所示,當(dāng)滑移率0.015≤s≤0.5時,冰、雪路面各自與其他6種路面的T(s)曲線沒有出現(xiàn)交叉重疊,同時考慮到7種典型路面的最佳滑移率均在區(qū)間[0.031,0.4]內(nèi),因此實際滑移率應(yīng)該在區(qū)間[0.015,0.5]內(nèi)變化,所以當(dāng)滑移率0.015≤s≤0.5時,以T(s)作為參數(shù)指標(biāo)能夠在實時滑移率下實現(xiàn)冰、雪路面準(zhǔn)確識別。
當(dāng)滑移率0.015≤s≤0.09時,干鵝卵石、干瀝青、干水泥、濕瀝青、濕鵝卵石5種路面的T(s)曲線出現(xiàn)交叉重疊,從而導(dǎo)致其識別區(qū)間曲線交叉重疊,因此在滑移率區(qū)間[0.015,0.09]內(nèi)通過路面特征系數(shù)對這5種路面進行識別時會出現(xiàn)識別錯誤。考慮到這5種路面的最佳滑移率均大于0.1,因此無論識別結(jié)果是5種路面中的哪一個,實時控制的目標(biāo)滑移率必然大于0.1,這樣實際滑移率會迅速向0.1以上遞增。當(dāng)滑移率0.09≤s≤0.5時,5種路面的T(s)曲線不再交叉重疊,同樣其識別區(qū)間曲線也不再交叉重疊,系統(tǒng)會立即對當(dāng)前路面作出準(zhǔn)確識別。
考慮到車輛絕大部分時間行駛在干瀝青路面,因此將目標(biāo)滑移率的初始值設(shè)為0.17,即默認(rèn)當(dāng)前路面為路面6。如圖4所示,當(dāng)滑移率<0.015時,冰、雪路面與干鵝卵石、濕鵝卵石路面的T(s)曲線出現(xiàn)交叉重疊,為了避免將干鵝卵石、濕鵝卵石路面錯誤識別成冰、雪路面導(dǎo)致目標(biāo)滑移率驟降,引起識別時間不必要的增加,當(dāng)滑移率<0.015時系統(tǒng)不進行識別。
制動過程中如果路面狀態(tài)發(fā)生躍變,當(dāng)從高附著系數(shù)路面躍變?yōu)榈透街禂?shù)路面時,附著系數(shù)曲線斜率瞬間無窮小,導(dǎo)致路面特征系數(shù)瞬間無窮小;當(dāng)從低附著系數(shù)路面向高附著系數(shù)路面躍變時,附著系數(shù)曲線斜率瞬間無窮大,導(dǎo)致路面特征系數(shù)瞬間無窮大。這兩種情況下路面特征系數(shù)都超出了7種典型路面的識別區(qū)間,因此創(chuàng)建一個虛擬路面,編號為路面8,識別區(qū)間為(-∞,0]∪(L7(s),+∞],路面8的最佳滑移率設(shè)為0.2,與7種典型路面均不同,這樣一旦路面發(fā)生躍變,目標(biāo)滑移率會調(diào)整為0.2,實際滑移率必然出現(xiàn)變化,從而在新的滑移率下完成對躍變路面的正確識別。
3.3 估算路面特征系數(shù)
前文定義T(s)的算法中包含對μ(s)和μ˙(s)的估算。因為
所以只要求出附著系數(shù)對時間的導(dǎo)數(shù)μ˙(t)和滑移率對時間的導(dǎo)數(shù)s˙(t),即可求出μ˙(s)。
根據(jù)式(2)得:

在已知車輪的角加速度、車輪制動器制動力矩、車輪受到的來自地面的法向作用力等基礎(chǔ)上,通過式(10)能夠快速估算出當(dāng)前路面的實時路面附著系數(shù)μ。
汽車在實際制動過程中,根據(jù)每個車輪動力學(xué)參數(shù)的估算值都可估算出當(dāng)前路面的路面特征系數(shù),考慮到汽車制動時載荷發(fā)生轉(zhuǎn)移,前輪提供汽車大部分的制動力,因此僅通過前輪進行路面特征系數(shù)的估算。當(dāng)左右前輪的行駛路面不同時,以低附著系數(shù)路面的最佳滑移率作為系統(tǒng)的控制目標(biāo)。
3.4 識別過程
當(dāng)駕駛員踩下制動踏板后,汽車開始制動,滑移率開始從0向0.17快速遞增。當(dāng)滑移率s=0.015時,系統(tǒng)開始估算當(dāng)前路面實時滑移率下的路面特征系數(shù)T,同時計算實時滑移率下的各路面的識別區(qū)間,接著判斷路面特征系數(shù)T落入哪個對應(yīng)識別區(qū)間,從而完成路面識別,并將識別路面的最佳滑移率作為控制器實時控制的目標(biāo)滑移率。在整個制動過程中系統(tǒng)不斷進行重復(fù)識別,一旦前一時刻的識別出現(xiàn)錯誤或路面發(fā)生躍變,下一時刻立即作出調(diào)整。
4 仿真試驗
在單輪車輛模型的基礎(chǔ)上,以30m/s的初速度在躍變路面上進行制動仿真試驗。
圖6~圖9為躍變路面的制動仿真結(jié)果。制動開始時預(yù)設(shè)路面為路面4(濕瀝青),2 s后躍變?yōu)槁访?(雪),3s后躍變?yōu)槁访?(干水泥)。識別結(jié)果如圖6所示,由于路面4向路面2躍變時路面特征系數(shù)瞬間無窮小,路面2向路面5躍變時路面特征系數(shù)瞬間無窮大,所以在2 s、3 s時錯誤識別出當(dāng)前路面為路面8(虛擬路面),下一時刻路面特征系數(shù)穩(wěn)定后準(zhǔn)確識別出當(dāng)前路面的路面狀態(tài),識別時間幾乎為0。如圖7所示,在不同路面上制動時,實際滑移率能夠快速準(zhǔn)確地跟蹤當(dāng)前路面最佳滑移率,控制效果良好。圖8為制動力系數(shù)-時間曲線,制動過程中制動力系數(shù)基本保持在當(dāng)前路面的峰值附著系數(shù),充分利用了不同路面的附著條件。圖9為速度-時間曲線,3.72 s后(車速<4m/s)ABS系統(tǒng)停止工作,輪速快速下降,3.92 s時車輪抱死,4.29 s時制動完成。在ABS系統(tǒng)工作過程中,車輪沒有出現(xiàn)抱死。
綜合圖6~圖9可以看出,制動過程中當(dāng)路面發(fā)生躍變后,系統(tǒng)立即完成當(dāng)前路面狀態(tài)的識別,實際滑移率立即跟蹤到當(dāng)前路面的最佳滑移率,確保制動力系數(shù)達到當(dāng)前路面的峰值附著系數(shù),充分利用了不同路面的附著條件,縮短了制動時間和制動距離,提高了制動效能,制動效果良好。
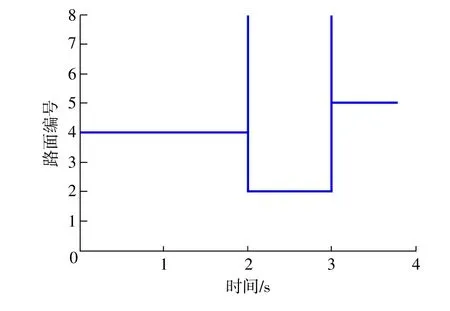
圖6 躍變路面識別仿真結(jié)果
為了進一步驗證該方法對多次躍變路面識別的實時性和準(zhǔn)確性,設(shè)置一組組合路面,按照(1-2-3-4-5-6-7-1)的順序每隔0.5s躍變一次,如圖10所示,識別結(jié)果與預(yù)設(shè)路面一致,躍變瞬間識別路面均為路面8(虛擬路面),識別時間幾乎0。圖11為導(dǎo)入誤差后的識別仿真結(jié)果,分別在0.5 s和2.5 s時導(dǎo)入誤差,系統(tǒng)出現(xiàn)錯誤識別,由于該方法能夠在動態(tài)識別區(qū)間下實現(xiàn)實時識別,下一時刻立即糾正了前一時刻的識別錯誤,可見該識別方法具備自動糾錯功能。
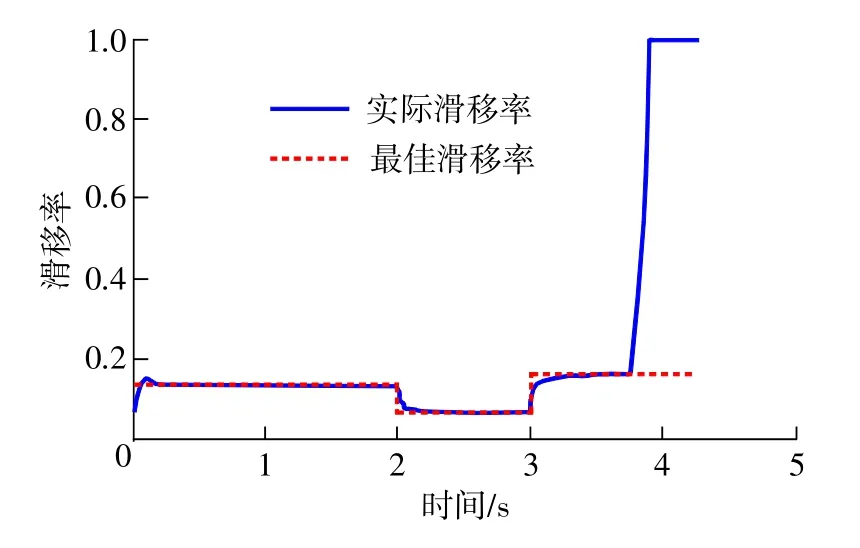
圖7 滑移率-時間曲線
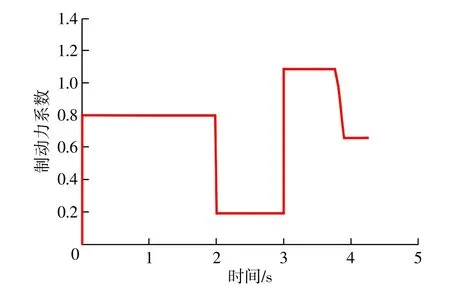
圖8 制動力系數(shù)-時間曲線
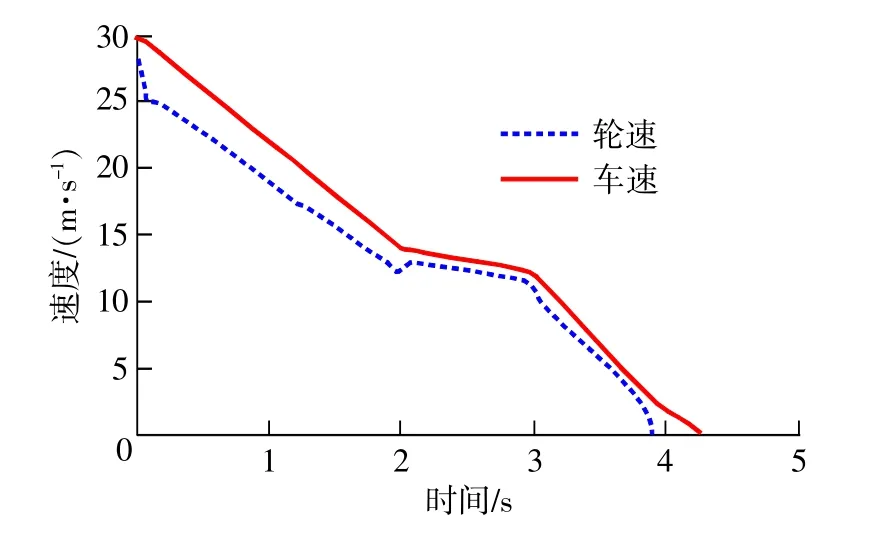
圖9 速度-時間曲線
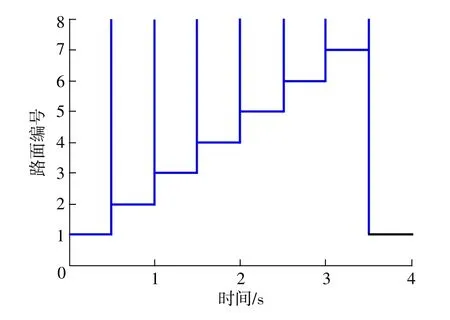
圖10 組合路面識別仿真結(jié)果
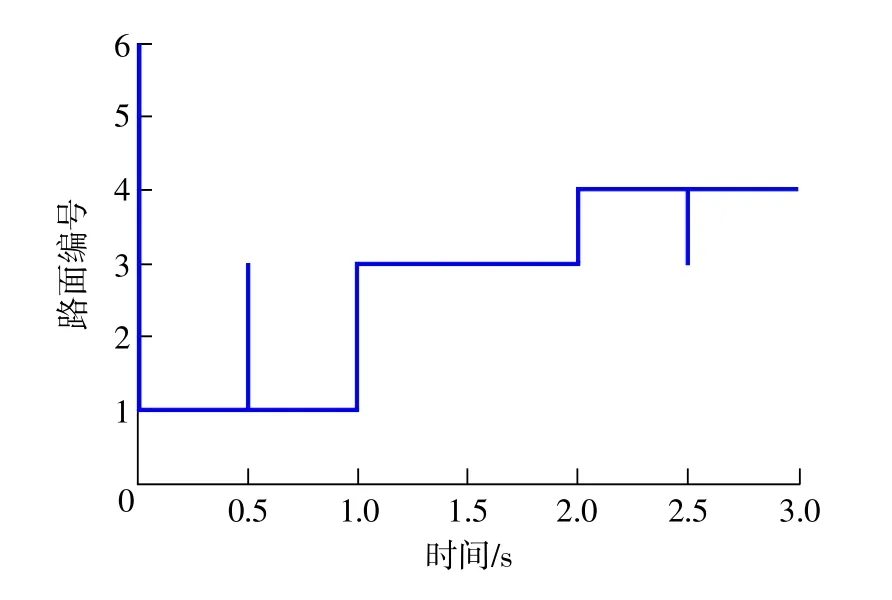
圖11 導(dǎo)入誤差后的識別仿真結(jié)果
5 結(jié)束語
1)提出“路面特征系數(shù)”的概念,將其作為參數(shù)指標(biāo)進行路面識別時,避免了附著系數(shù)或附著系數(shù)曲線斜率單獨作為識別參數(shù)時,附著系數(shù)曲線或附著系數(shù)斜率曲線交叉重疊對識別的影響,克服了個別滑移率下不同路面參數(shù)指標(biāo)相等帶來的不便。
2)根據(jù)T(s)曲線特點建立了動態(tài)識別區(qū)間,每個滑移率下都有對應(yīng)的識別區(qū)間,實現(xiàn)了實時滑移率下的動態(tài)識別。同時具備自動糾錯功能,一旦出現(xiàn)識別錯誤,下一時刻會立即糾正。
[1]余志生.汽車?yán)碚揫M].4版.北京:機械工業(yè)出版社,2008:21-29.
[2]Gutafsson F.Slip-based tire-road friction estimation[J]. Auromaricu,1997(33):1087-1099.
[4]宋健,楊財,李紅志,等.AYC系統(tǒng)基于多傳感器數(shù)據(jù)融合的路面附著系數(shù)估計算法[J].清華大學(xué)學(xué)報,2009(5):101-104.
[5]王博,孫仁云,徐延海,等.考慮路面不平度的路面識別方法[J].機械工程學(xué)報,2012(24):127-133.
[6]盧俊輝,巫世晶.基于車輪振動的路面實時識別研究[J].振動與沖擊,2008(4):19-22.
[7]張曉龍,孫仁云,林小龍,等.基于附著系數(shù)曲線長度的路面識別仿真研究[J].湖北汽車工業(yè)學(xué)院學(xué)報,2014,28(2):1-4.
[8]王博,孫仁云.基于狀態(tài)特征因子的路面識別方法研究[J].汽車工程,2012,34(6):506-510.
[9]Burckhardt M.Fahrwerktechnik.Radschlupf-Regelsysteme [M].Wrzburg:VogelVerlag,1993.
A research on road identification based on road characteristic coefficient
ZHANG Xiaolong,SUN Renyun,LIU Changwei,GE Hengyong
(School of Transportation and Automobile Engineering,Xihua University,Chengdu 610039,China)
It is necessary to identify the road surface so as to make full use of its adhesive condition during braking,and accordingly to adjust the target slip ratio in real time.The concept of road characteristic coefficient-the sum of road adhesion coefficient and its gradient-was introduced based on the Burckhardt tyre-road model.Seven typical road characteristic coefficient curves and corresponding dynamic identification intervals were established to identify dynamically the pavement condition during braking.At the same time,brake simulation tests were conducted based on a single-wheel model,and the experimental results show that the method discussed in the paper can quickly and accurately determine road conditions and automatically correct errors.
road identification;road characteristic;coefficient;dynamic;identification interval
A文章編號:1674-5124(2015)08-0031-05
10.11857/j.issn.1674-5124.2015.08.007
0 引言
汽車電控制動系統(tǒng)的核心在于調(diào)整路面對輪胎的切向作用力,而該作用力受到路面附著條件的制約,同時路面附著條件又受到滑移率的影響,只有在最佳滑移率下才能最大限度地利用路面的附著條件[1]。但是不同路面的最佳滑移率往往不同,這就需要在制動時對路面狀態(tài)作出準(zhǔn)確識別。
2014-12-04;
2015-02-17
四川省科技廳應(yīng)用基礎(chǔ)項目(2012JY0049)
西華大學(xué)人才培養(yǎng)與引進基金項目(R0920301)
西華大學(xué)研究生創(chuàng)新基金項目(ycjj2015148)
張曉龍(1988-),男,陜西蒲城縣人,碩士,主要從事汽車電控技術(shù)研究。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:38