基于算法的磁懸浮電機拖動系統多頻率振動控制方法與實驗研究
2015-07-22 18:16:14李紅王拓宇鄭世強
哈爾濱理工大學學報 2015年2期
李+紅++王拓宇++鄭世強


摘要:針對高速磁懸浮電機拖動系統中轉子本身的不平衡振動和由于不對中導致旋轉時產生二倍轉頻振動,提出一種基于FIR濾波器的自適應前饋控制方法,把轉子之間的擾動看成是不同頻率的擾動,對兩軸建立數學模型,將自適應濾波器的輸出作為補償信號與擾動相抵消.通過廣義根軌跡分析了加入了前饋控制后對磁軸承控制系統穩定性的影響,并分析了在不同步長不同階數下自適應前饋控制器的性能.仿真結果表明,該方法能有效地抑電動機轉子軸的基頻和二倍頻振動,在電機對拖實驗中,當轉速為10000r/min時,轉子基頻和二倍頻振動增益分別減小12.ldB和19dB,位移跳動量降低了67.56%.
關鍵詞:磁懸浮電機;不對中;FxLMS算法;多頻率振動
DOI:10.15938/j.jhust.2015.02.006
中圖分類號:TP273
文獻標志碼:A
文章編號:1007-2683(2015)02-0028-07
0 引 言
主動磁軸承(active magnetic bearings,AMB)因其無接觸、無摩擦、無需潤滑、長壽命和主動可控的優點,得到了越來越多的研究和應用.隨著磁懸浮技術的日益成熟,磁懸浮電機被廣泛應用到諸如磁懸浮鼓風機、磁懸浮壓縮機等高速旋轉機械裝備領域.在旋轉機械中,振動是廣泛存在的,多頻率振動多以倍頻諧波或者獨立無關形式存在.在一個測試電機性能的高速磁懸浮電機對拖系統中,兩臺電機分別作為主動和被動部件,轉子由聯軸器聯接來傳遞扭矩,由于安裝、制造和起浮的誤差,兩個電機的轉子不能理想對中.在電機高速旋轉時,轉子不對巾會增大轉子由于不平衡振動產生的轉速同頻振動,并且產生轉速的二倍頻振動,可以將轉子二倍頻比例值作為含有不對中故障轉子嚴重程度的一個判斷依據.由轉子不對中引起的振動會增大控制電流和功耗,影響電機穩定性,不加以主動控制,嚴重的會使得轉子碰到保護軸承,從而造成轉子損壞,
基于FIR濾波器的白適應FxLMS算法由于結構簡單,算法本身只有乘加運算,易于與標準DSP硬件匹配,系統存在建模誤差時魯棒性強等特點,已經廣泛地應用與振動的主動控制和噪聲的消除.魏彤等將FxLMS應用于控制力矩陀螺的精確前饋控制中,仿真證明可以抑制由于框架位移引起的振動,梁青等對FxLMS算法進行改進,在具有帶通濾波器的系統上,在求出濾波器的輸出的基礎上,反解出電流值加入磁懸浮隔振器中,試驗證明對隔振器中7Hz到15Hz的振動很有效果.ZENGER等證明了在控制系統中增加FxLMS算法的前饋通道的數量可以抑制多個不同頻率的振動,但只有仿真缺乏實驗驗證.JIANG等利用頻域分塊LMS算法計算FIR濾波器權值,對多頻率振動的抑制可以實現算法復雜度的不增加,但算法本身較復雜,不利于工程應用.上述這些文獻里,著重描述了FxLMS算法的應用,欠缺對加入算法后對系統穩定性的影響,以及FIR濾波器長度和LMS算法步長等參數變化時不同控制效果的分析,
本文通過對FxLMS算法本身參數取值進行分析,并選擇理想的參數,應用于磁懸浮電機的對拖試驗平臺.
1 對拖系統磁軸承轉子模型
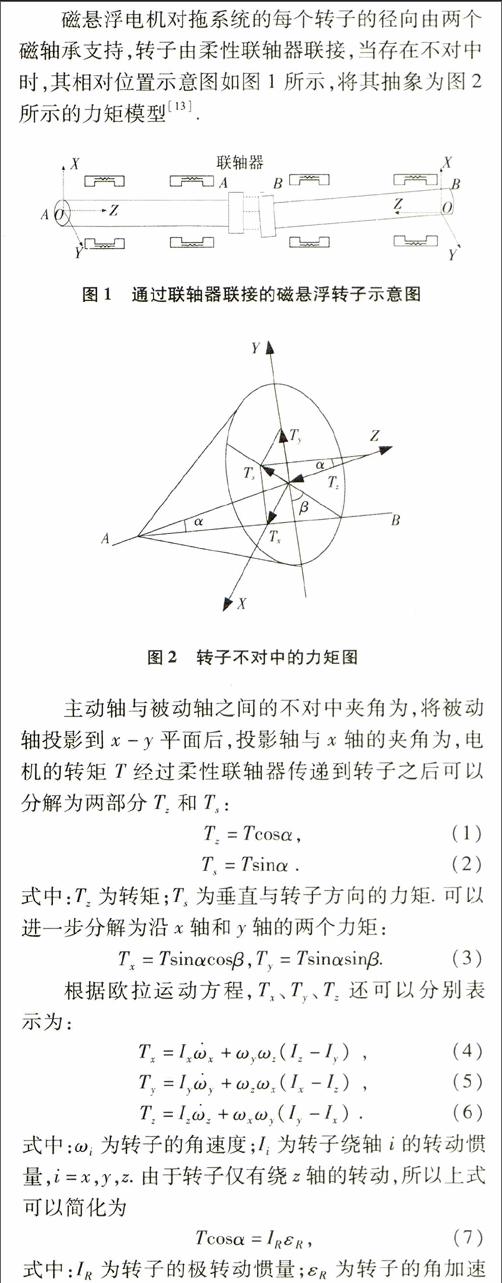
磁懸浮電機對拖系統的每個轉子的徑向由兩個磁軸承支持,轉子由柔性聯軸器聯接,當存在不對巾時,其相對位置示意圖如圖1所示,將其抽象為圖2所示的力矩模型.
主動軸與被動軸之間的不對中夾角為.將被動軸投影到x-y平面后,投影軸與x軸的夾角為,電機的轉矩T經過柔性聯軸器傳遞到轉子之后可以分解為兩部分T2和T3:式中:T2為轉矩;T3為垂直與轉子方向的力矩.可以進一步分解為沿X軸和y軸的兩個力矩:
Tx=Tsinacosp,Ty=Tsinasiβ.
(3)
根據歐拉運動方程,Tx、Ty、Tz還可以分別表示為:式中:ω為轉子的角速度;Ti為轉子繞軸i的轉動慣量,i=X,y,z.由于轉子僅有繞z軸的轉動,所以上式可以簡化為
Tcosa= /R8n,
(7)式中:IR為轉子的極轉動慣量;εR為轉子的角加速度,對于具有夾角α的對拖系統,其角速度滿足以下關系: 式中:ω為被動軸的角速度;ω為主動軸的角速度;θ為主動軸的轉角,式(8)可以展開為:式中,n=1.2. 3…其中,A,B、C、D均為只與α有關的常數,當夾角α不變時,其值也可以視為不變.將式(10)帶人式,并令θ=ΩT,可以得到輸入轉矩:可以看出,x、y方向上的轉矩頻率都為轉速的2n倍關系,故角度不對中產生2n倍轉頻的振動.
2 自適應前饋算法
3 穩定性分析
本文采用前饋控制器對磁軸承控制系統進行補償,其改變r原控制系統的前向通道,因此有必要對新的磁軸承控制系統的穩定性進行分析,單個的自適應濾波器輸出Y(z)和單個頻率誤差E(z)之間的關系為:式中:函可以取-90°<φ<90°,一般的,可以取A=l.在原系統為穩定的基礎上,加入前饋控制的主動控制系統的主導根軌跡圖如下所示,仿真時轉速設為0-500Hz,每次增加5Hz.圖5(a)、(b)中,FxLMS濾波器的階數為32,步長d分別為0.0001和-0.000I.從圖5(a)中可以看出,在低速時,系統極點息都存虛軸左側,說明系統穩定,而轉速達到200Hz以L的時候,系統就出現了不穩定極點,而圖5(b)中,在低速時,系統的根軌跡在虛軸右側,在轉速為250Hz時到達虛軸左邊,為了解決磁軸承系統到達高速不穩定的問題,在圖5(c)為根軌跡的系統中,將(a)、(1))兩圖的取值結合,在振動頻率為0-200Hz的時候取“為正值,200-250Hz時,取“為0.250-500Hz.時取為負值,系統的根全部位于左半平面,則在整個頻率范圍系統是穩定的.
4 算法仿真和性能分析
將自適應前饋控制器加入到主動磁軸承系統中,在外加多頻正弦信號作為振動的條件下,將其控制效果與未加前饋控制的原離散PID控制系統的控制效果作對比.仿真參數采用4kW磁懸浮電機樣機系統參數,如表1所示,前饋環節采用基于M函數的level2-S函數模擬.
