車載飛輪電池用無軸承永磁同步電動機神經(jīng)網(wǎng)絡(luò)控制
2015-07-25 03:36:02高海宇孫曉東楊澤斌
軸承 2015年2期
關(guān)鍵詞:系統(tǒng)
高海宇,孫曉東,楊澤斌
(1.意昂神州(北京)科技有限公司,北京 100085;2.江蘇大學(xué) a.汽車工程研究院;b.電氣信息工程學(xué)院,江蘇 鎮(zhèn)江 212013)
作為環(huán)境友好型的電動汽車,以節(jié)能優(yōu)勢很好地緩解了當(dāng)前世界面臨的環(huán)境污染與能源匱乏問題[1]。車載儲能電池技術(shù)作為電動汽車的能量來源,是促進(jìn)電動汽車產(chǎn)業(yè)不斷持續(xù)發(fā)展的關(guān)鍵技術(shù)之一。目前,在車載動力電池系統(tǒng)中,飛輪電池以其比能量高、比功率大、充電快、綠色環(huán)保等突出優(yōu)點受到了國內(nèi)外的高度重視[2]。
采用機械接觸式軸承支承車載動力電池系統(tǒng)中高速運行的電動機時,軸承磨損嚴(yán)重,使用壽命縮短,影響車載動力電池系統(tǒng)的性能。磁軸承具有無機械摩擦、無需潤滑、低噪聲、長壽命等優(yōu)點,可以很好地克服機械接觸式軸承的上述缺點[3-4]。將磁軸承技術(shù)與傳統(tǒng)電動機相結(jié)合,形成了無軸承電動機(也稱磁懸浮電動機)[5-7]。
常規(guī)的磁懸浮飛輪儲能電池系統(tǒng)由1個單自由度軸向磁軸承、2個二自由度徑向磁軸承以及1臺高速電動機組成,具有體積龐大、結(jié)構(gòu)復(fù)雜、成本較高等缺點。如果采用集徑向和軸承懸浮功能的三自由度磁軸承以及集自懸浮和旋轉(zhuǎn)功能的二自由度無軸承電動機共同構(gòu)成磁懸浮飛輪儲能電池系統(tǒng),不但可以節(jié)省磁軸承數(shù),降低功率損耗,而且可以大大提高轉(zhuǎn)子的軸向利用率及無軸承電動機的臨界轉(zhuǎn)速,從而進(jìn)一步增大磁懸浮飛輪儲能電池系統(tǒng)的比容量和比功率。
具有自學(xué)習(xí)功能的單神經(jīng)元PID可以克服常規(guī)PID控制方法的不足,使系統(tǒng)具有較強的魯棒性[8]。徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)(RBFNN)具有較快的收斂速度以及較強的全局逼近能力,在解決一般非線性的控制方面被廣泛應(yīng)用[9]。因此,以用于飛輪儲能電池系統(tǒng)的二自由度無軸承永磁同步電動機(BPMSM)為例,提出了一種RBFNN在線辨識的BPMSM單神經(jīng)元PID控制方法,在MATLAB仿真平臺上對該方法進(jìn)行仿真分析,將其與常規(guī)PID控制方法進(jìn)行了對比研究。
1 BPMSM數(shù)學(xué)模型
BPMSM定子槽內(nèi)疊繞著極對數(shù)相差為1的徑向力繞組與轉(zhuǎn)矩繞組,其中由徑向力繞組產(chǎn)生的氣隙磁場改變了原先由轉(zhuǎn)矩繞組建立的氣隙磁場分布,使得電動機一側(cè)的氣隙磁密增強而相對的一側(cè)氣隙磁密變?nèi)酰瑥亩a(chǎn)生了方向朝磁密增強一側(cè)的麥克斯韋力[10],BPMSM徑向力在旋轉(zhuǎn)d-q坐標(biāo)系下可表示為
(1)
式中:Fα和Fβ分別為α和β方向的徑向力;is2d和is2q分別為d-q坐標(biāo)系下的徑向力繞組電流分量;Ψ1d,Ψ1q分別為d-q坐標(biāo)系下轉(zhuǎn)矩繞組的氣隙磁鏈分量;KM為麥克斯韋力常數(shù);KL為洛侖茲力常數(shù);l為電動機定子鐵芯長度;r為電動機定子內(nèi)徑;μ0為空氣磁導(dǎo)率;Lm2為徑向力繞組互感;PM,PB分別為2套繞組的極對數(shù);W1,W2分別為2套繞組的匝數(shù);kW1,kW2分別為2套繞組的系數(shù)。
BPMSM電磁轉(zhuǎn)矩和轉(zhuǎn)速方程為
(2)
式中:T和TL分別為電磁轉(zhuǎn)矩和負(fù)載轉(zhuǎn)矩;ω為轉(zhuǎn)速;is1d和is1q分別為d-q坐標(biāo)系下BPMSM轉(zhuǎn)矩繞組電流分量;Jz為轉(zhuǎn)動慣量。
2 單神經(jīng)元PID
3輸入單神經(jīng)元PID控制器的結(jié)構(gòu)示意圖如圖1所示,其中PID控制器的比例、積分、微分3個系數(shù)分別采用單神經(jīng)元的3個連接權(quán)系數(shù)代替[11];xi(i=1,2,3)表示輸入變量;wi和K分別為輸入變量xi的權(quán)系數(shù)和神經(jīng)元的比例系數(shù);u為輸出變量。

圖1 單神經(jīng)元PID控制器結(jié)構(gòu)示意圖
取神經(jīng)元的輸入為
(3)
式中:r(k),y(k)和e(k)分別表示輸入量、反饋量和誤差。神經(jīng)元輸出量為
u(k)。
(4)
系統(tǒng)誤差的二次性能指標(biāo)函數(shù)定義為
(5)
對權(quán)系數(shù)wi(k)沿著二次性能指標(biāo)函數(shù)J的遞減方向進(jìn)行調(diào)節(jié),使J取最小值。J關(guān)于wi(k)的梯度為
(6)
由此可得
(7)
式中:ηi(i=1,2,3)為比例、積分、微分的學(xué)習(xí)率。
3 RBFNN結(jié)構(gòu)
3層RBFNN的結(jié)構(gòu)示意圖如圖2所示[12],其中輸入層的節(jié)點數(shù)為k=1,2,…,n,隱含層節(jié)點數(shù)j=1,2,…,m。在RBFNN結(jié)構(gòu)中,Z=[z1,z2,…,zn]T和H=[h1,h2,…,hm]T分別表示網(wǎng)絡(luò)的輸入向量和徑向基向量,V=[v1,v2,…,vm]T為網(wǎng)絡(luò)的權(quán)向量。hj高斯基函數(shù)為
(8)
式中:bj為網(wǎng)絡(luò)第j個節(jié)點的基寬參數(shù);cj為網(wǎng)絡(luò)第j個節(jié)點的中心向量。
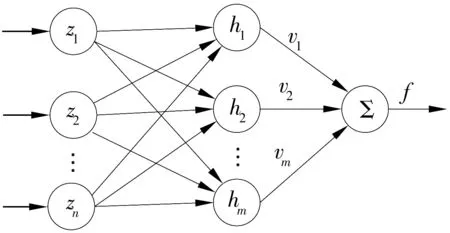
圖2 RBFNN結(jié)構(gòu)圖
RBFNN的輸出為
(9)
定義辨識網(wǎng)絡(luò)的性能指標(biāo)E為
(10)
通過動態(tài)遞推算法和遞歸最小二乘算法分別實現(xiàn)RBFNN中心向量的調(diào)整以及線性層連接權(quán)值的學(xué)習(xí),寬度可以采用直接計算的方法確定。
4 BPMSM的神經(jīng)網(wǎng)絡(luò)控制
車載動力電池系統(tǒng)用BPMSM神經(jīng)網(wǎng)絡(luò)控制的系統(tǒng)框圖如圖3所示。圖中,rα,rβ和rω分別表示BPMSM的3個輸入變量(α,β方向的徑向以及轉(zhuǎn)速);yα,yβ和yω分別表示BPMSM對應(yīng)的3個輸出變量。NNI和NNC分別表示BPMSM的RBFNN辨識網(wǎng)絡(luò)模型以及閉環(huán)單神經(jīng)元PID控制器;uα,uβ和uω分別表示NNC對應(yīng)的3個輸出變量;fα,fβ和fω分別表示NNI對應(yīng)的3個輸出變量。具體的控制算法如下(以一路為例):
(1)RBFNN的參數(shù)vj,cj和bj分別取[-1,1]之間的隨機數(shù)。
(2)對BPMSM進(jìn)行采樣,獲取系統(tǒng)k時刻的輸入r(k)與輸出y(k),由(3)式計算e(k),e(k-1)和e(k-2)。
(3)由 (4)式計算k時刻單神經(jīng)元的輸出u(k),同時傳送給被控的BPMSM系統(tǒng)與辨識的BPMSM模型,從而得到k+1時刻的實際輸出與辨識輸出。
(4)由 (9)式計算RBFNN的輸出,RBFNN的輸出為f(k+1),目標(biāo)值為實際輸出y(k+1)。
(5)將f(k+1)與y(k+1)進(jìn)行比較,利用得到的偏差調(diào)整RBFNN的權(quán)值系數(shù)閾值。
(6)將r(k+1)與y(k+1)進(jìn)行比較,利用得到的偏差調(diào)整單神經(jīng)元的權(quán)值。先計算?y(k+1)/?u(k),取f(k+1)≈y(k+1),則有
(11)
權(quán)值調(diào)整公式為
wi(k)。
(12)
(7)令k=k+1,返回(2)繼續(xù)計算。
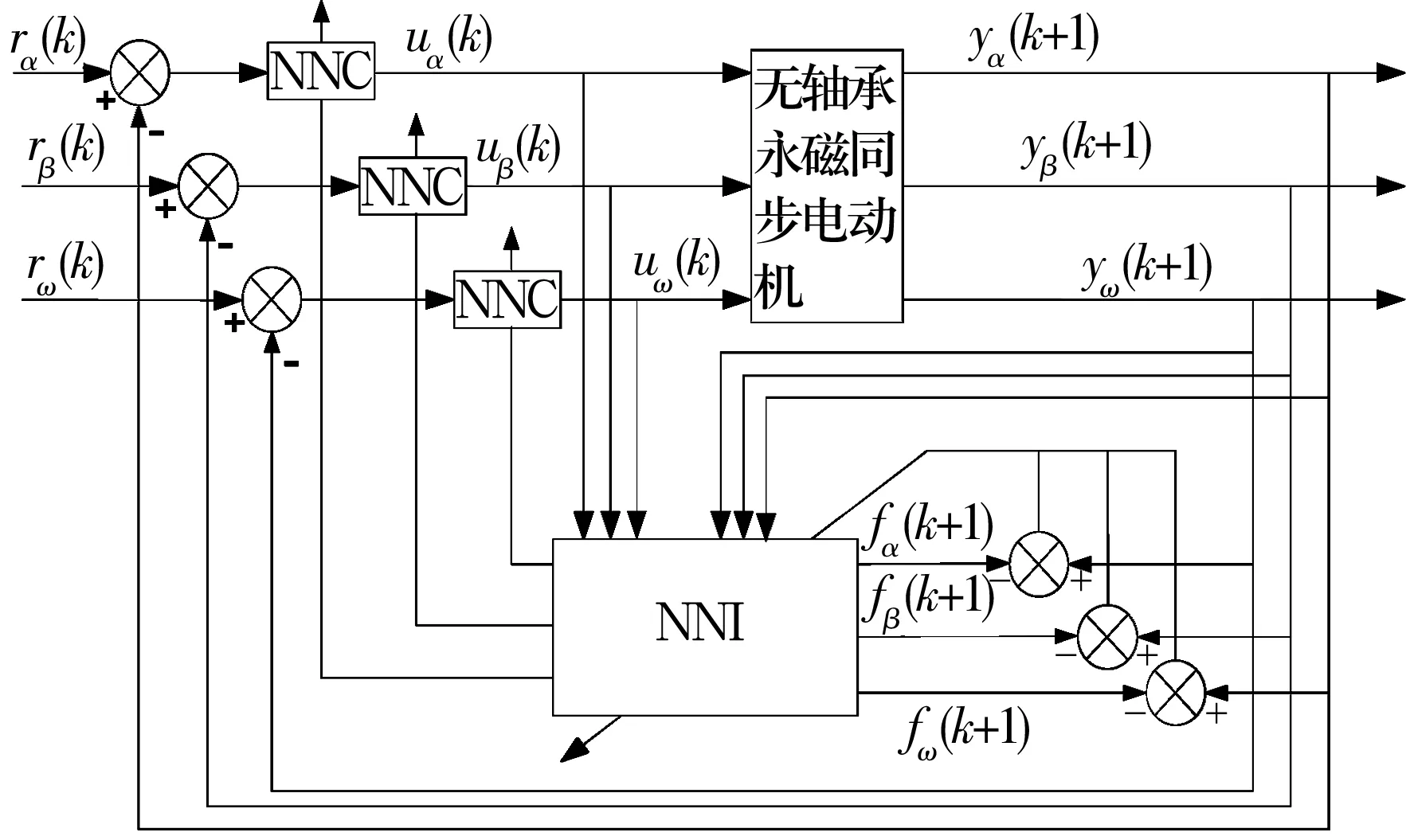
圖3 BPMSM神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)結(jié)構(gòu)圖
5 仿真研究
為了驗證控制策略的有效性,在MATLAB/Simulink仿真環(huán)境下構(gòu)建BPMSM神經(jīng)網(wǎng)絡(luò)的仿真系統(tǒng)進(jìn)行仿真研究,仿真參數(shù)采用試驗樣機參數(shù),以1臺功率為2 kW,PM=1,PB=2的表貼式BPMSM為例,具體參數(shù)見表1。

表1 電動機主要參數(shù)
傳統(tǒng)PID及RBFNN控制的仿真結(jié)果如圖4和圖5所示。其中圖4a與圖5a分別為采用2種控制方法的速度響應(yīng)曲線,圖4b與圖5b分別為采用2種控制方法的轉(zhuǎn)子質(zhì)心從開始起浮直至穩(wěn)定懸浮的運動軌跡曲線。對比可知,采用RBFNN控制策略時,BPMSM速度響應(yīng)變快,調(diào)節(jié)時間從原來的0.28 s降低為0.13 s,縮短了50%以上,且轉(zhuǎn)速超調(diào)量幾乎為零;轉(zhuǎn)子的運動軌跡以內(nèi)螺旋狀更快地逼近平衡中心點,α和β方向徑向位移的峰峰值從0.2 mm下降為0.15 mm,降低了25%。由此可見,RBFNN控制策略可以顯著改善RPMSM系統(tǒng)的動、靜態(tài)特性。

圖4 PID控制的仿真結(jié)果

圖5 RBFNN控制的仿真結(jié)果
6 結(jié)束語
針對車載磁懸浮飛輪儲能電池用BPMSM這個多變量、非線性、強耦合的時變系統(tǒng),提出了新型BPMSM系統(tǒng)神經(jīng)網(wǎng)絡(luò)控制方法。通過RBFNN辨識BPMSM輸入輸出的映射關(guān)系,建立了BPMSM系統(tǒng)的在線模型,同時為單神經(jīng)元PID閉環(huán)控制器提供了梯度信息,實現(xiàn)了BPMSM系統(tǒng)參數(shù)的在線辨識和調(diào)整。對二自由度表面貼裝式車載磁懸浮飛輪儲能電池用BPMSM進(jìn)行了仿真分析,結(jié)果表明,該控制策略能夠顯著提高BPMSM系統(tǒng)的靜態(tài)和動態(tài)性能。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32