深入探討幾種可控節(jié)拍輸送鏈的動(dòng)力及傳動(dòng)選型的設(shè)計(jì)計(jì)算方法
2015-07-27 06:12:28齊力寧王立維承德市五一四地質(zhì)大隊(duì)河北承德067000唐山愛信齒輪有限公司河北唐山064099
山東工業(yè)技術(shù) 2015年16期
齊力寧,王立維(.承德市五一四地質(zhì)大隊(duì),河北 承德 067000;.唐山愛信齒輪有限公司,河北 唐山 064099)
深入探討幾種可控節(jié)拍輸送鏈的動(dòng)力及傳動(dòng)選型的設(shè)計(jì)計(jì)算方法
齊力寧1,王立維2
(1.承德市五一四地質(zhì)大隊(duì),河北 承德 067000;2.唐山愛信齒輪有限公司,河北 唐山 064099)
可控節(jié)拍輸送鏈大致有以下4種,倍速輸送鏈、側(cè)置滾輪輸送鏈、頂置滾輪輸送鏈、鏈?zhǔn)阶杂奢伒溃@些輸送鏈雖已廣泛應(yīng)用于工農(nóng)業(yè)自動(dòng)化中,但在目前可查閱文獻(xiàn)中關(guān)于基礎(chǔ)理論計(jì)算的內(nèi)容還不夠豐富,有些類別甚至少有論述。其實(shí)在此領(lǐng)域關(guān)于動(dòng)力選型計(jì)算尚有些很微妙的重要之處,因未有系統(tǒng)的論述總結(jié),容易被忽略,在實(shí)際應(yīng)用中可能出現(xiàn)重大失誤,造成損失,特以此文論述之,拋磚引玉,希望能引起同業(yè)的關(guān)注,共同討論完善。
可控節(jié)拍輸送鏈;倍速輸送鏈;側(cè)置滾輪輸送鏈;頂置滾輪輸送鏈;鏈?zhǔn)阶杂奢伒?理論計(jì)算;功率的計(jì)算;電機(jī)選型;連續(xù)工作變載荷;電機(jī)工作制S9;綠色環(huán)保;節(jié)能
1 引言
機(jī)器的動(dòng)力部分是機(jī)器的能量來源,它將各種能量轉(zhuǎn)變?yōu)闄C(jī)器能(又稱機(jī)械能)。所以在各種機(jī)器中,其所采用的動(dòng)力源的形式、大小直接關(guān)系到機(jī)器的運(yùn)行效能及穩(wěn)定性。在現(xiàn)代工業(yè)中,隨著技術(shù)進(jìn)步及工藝革新,采用電力作為動(dòng)力源進(jìn)行拖動(dòng)的應(yīng)用更加普遍,并且電力拖動(dòng)相較于其他動(dòng)力源的應(yīng)用比例也在不斷擴(kuò)大。所以在動(dòng)力選型上,因?yàn)槊鎸?duì)著更多更復(fù)雜的應(yīng)用環(huán)境,恰當(dāng)?shù)倪x型方法是至關(guān)重要的。我們?cè)谀彻こ痰木唧w運(yùn)用中,使用頂置滾輪輸送鏈時(shí)減速電機(jī)出現(xiàn)了問題,按照一般選型方法選出的減速電機(jī)在使用中出現(xiàn)了過載現(xiàn)象,我們?cè)卺槍?duì)這一問題的判定及解決問題的過程中,總結(jié)歸納了該類輸送機(jī)(可控節(jié)拍輸送鏈)的動(dòng)力及傳動(dòng)的選型方法。
2 可控節(jié)拍輸送鏈的結(jié)構(gòu)及特點(diǎn)
2.1 倍速輸送鏈。
倍速輸送鏈?zhǔn)怯蓛?nèi)鏈板、套筒、滾子、滾輪、外鏈板、銷軸和止鎖件等7種零件組成。如圖1所示:
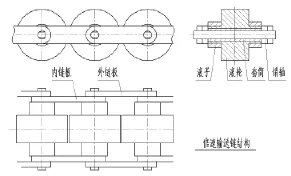
圖1
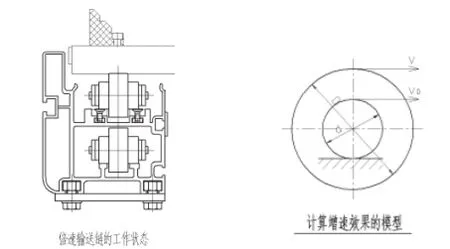
圖2
倍速輸送鏈工作時(shí)的狀態(tài)及增速原理如以下兩圖(與后文的動(dòng)力選型有關(guān))。如圖2
在工作時(shí),鏈條被牽引運(yùn)行,鏈條的滾子與承載軌道接觸滾動(dòng),同時(shí)帶動(dòng)鏈條滾輪轉(zhuǎn)動(dòng),從而使被運(yùn)送的工裝板不但會(huì)隨著鏈條運(yùn)動(dòng),還會(huì)受到滾輪轉(zhuǎn)動(dòng)的傳動(dòng),其實(shí)際被輸送的速度是二者之和。
2.2 側(cè)置滾輪輸送鏈、頂置滾輪輸送鏈、鏈?zhǔn)阶杂奢伒馈?/p>
側(cè)置和頂置滾輪輸送鏈都是由鏈條本體和側(cè)置(頂置)滾輪組成。形式多樣,但結(jié)構(gòu)雷同。如圖3。
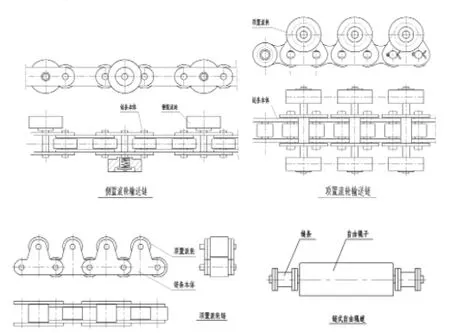
圖3
在工作時(shí),鏈條被牽引運(yùn)行,鏈條的承載滾子與承載軌道接觸滾動(dòng),而側(cè)置(頂置)滾輪處于自由狀態(tài),支撐被運(yùn)送的工裝板隨著鏈條運(yùn)動(dòng),當(dāng)工裝板被停止時(shí),鏈條與工裝板之間的側(cè)置(頂置)滾輪可以自由轉(zhuǎn)動(dòng),無須停止鏈條的運(yùn)動(dòng)。
鏈?zhǔn)阶杂奢伒琅c上述兩種鏈條工作原理上沒有區(qū)別,只是應(yīng)用場(chǎng)合不同而結(jié)構(gòu)有所差異。
3 可控節(jié)拍輸送鏈的動(dòng)力及傳動(dòng)選型計(jì)算方法
3.1 選型路線遵循以下主要步驟
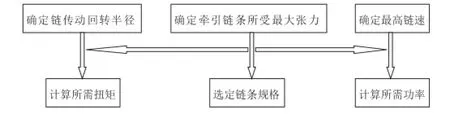
3.2 確定牽引鏈條所受最大張力
牽引鏈條所受的張力取決于拖動(dòng)負(fù)載需要克服的阻力,阻力越大,鏈條張力越大。形成阻力的主要因素有:?jiǎn)?dòng)阻力、拖動(dòng)負(fù)載運(yùn)行所做的功、機(jī)構(gòu)內(nèi)部阻力等。啟動(dòng)阻力對(duì)于啟停頻繁或者啟動(dòng)阻力很大的情況必須考慮,否則可忽略此因素,不必考慮。機(jī)構(gòu)內(nèi)部阻力是必須考慮的,一般根據(jù)機(jī)構(gòu)特征選定補(bǔ)償系數(shù)即可。拖動(dòng)負(fù)載運(yùn)行所做的功要考慮三方面,一為加速阻力,二為豎直提升所做的功,三為水平阻力。加速阻力沒有特殊需求的,一般不必考慮,對(duì)此本文不論述。對(duì)于節(jié)拍輸送鏈,因?yàn)槎际撬酵蟿?dòng)形式,所以主要考慮水平阻力。
節(jié)拍輸送鏈水平阻力的來源:鏈條自重的摩擦阻力(F1)、拖動(dòng)負(fù)載運(yùn)行的摩擦阻力(F2)、擋停負(fù)載后形成的摩擦阻力(F3)。
總的阻力F=F1+F2+F3
F1=(q1L1)*μ1μ1為摩擦系數(shù),q1為鏈條每米重量,L1為鏈條總長(zhǎng)度;
F2=(q2L2)*μ2μ2為摩擦系數(shù),q2為承載的負(fù)載每米重量,L2為帶負(fù)載正常運(yùn)行部分總長(zhǎng)度;
F3=(q3L3)*μ3μ3為摩擦系數(shù),q3為承載的負(fù)載每米重量,L3為被擋停部分的帶負(fù)載部分之總長(zhǎng)度;
F1的計(jì)算模型直觀,方法簡(jiǎn)單,值得注意的是F2與F3的計(jì)算。
對(duì)于一般的不增速鏈條,比如頂置或側(cè)置滾輪鏈,托盤在被拖動(dòng)時(shí)與鏈條沒有相對(duì)運(yùn)動(dòng),所以只需考慮鏈條滾輪與軌道的摩擦力,此時(shí)μ2=μ1,此系數(shù)是鏈條滾子的轉(zhuǎn)動(dòng)摩擦系數(shù),其大小取決于其摩擦性質(zhì)。
而當(dāng)托盤被擋停時(shí),托盤與頂置或側(cè)置滾輪之間也有相對(duì)運(yùn)動(dòng),所以在頂置滾輪和托盤之間也有摩擦阻力,設(shè)為μd,此時(shí)μ3=μ1+μdμd的大小取決于其摩擦性質(zhì),當(dāng)μ1=μd時(shí),μ3=2μ1。
但是對(duì)于增速鏈條,情況有所不同,當(dāng)托盤不被擋停時(shí),托盤受到增速運(yùn)動(dòng),托盤比鏈條的運(yùn)動(dòng)速度快;此時(shí)不僅是鏈條滾輪與軌道之間有摩擦阻力,鏈條的承載滾輪與托盤間也有摩擦阻力,設(shè)其摩擦系數(shù)為μz,此時(shí)滿足

式(2)為力矩平衡
在此之所以特別考慮力矩平衡,是因?yàn)橐紤]增速效果,當(dāng)增速效果100%時(shí),意味著承載滾輪與鏈條滾輪之間沒有相對(duì)轉(zhuǎn)動(dòng)(模型參看上文);而一旦式②不滿足時(shí),增速效果就開始下降,承載滾輪與鏈條滾輪之間開始轉(zhuǎn)動(dòng),在這樣的情形下,就與托盤被擋停時(shí)的狀況相同了,所以我們也可以根據(jù)這一原理大致推算出增速的極限。
根據(jù)式(1)和式(2)可知,F(xiàn)2max=2(q2L2)*μ2
增速鏈條托盤被擋停時(shí),要克服鏈條滾輪與軌道、承載滾輪與鏈條滾輪之間產(chǎn)生的摩擦阻力,此時(shí)
F3=2(q2L2)*μ3, μ3=μ2
3.3 確定所需扭矩
在動(dòng)力選型中我們要有限考慮機(jī)構(gòu)的輸出扭矩是否足夠,來確保傳動(dòng)機(jī)構(gòu)的穩(wěn)定性。
Na=F*S,其中F為阻力之和,S為轉(zhuǎn)動(dòng)半徑(一般就是鏈傳動(dòng)的回轉(zhuǎn)半徑)
3.4 確定所需功率
P=F*v,其中v為鏈條的運(yùn)行速度。
μz是一個(gè)滾動(dòng)摩擦系數(shù),值很小,
3.5 安全系數(shù)及工況對(duì)選型的影響
以上的計(jì)算只是考慮了理想狀態(tài),而實(shí)際應(yīng)用中我們還需要根據(jù)具體環(huán)境、傳動(dòng)機(jī)構(gòu)特點(diǎn)和工作制對(duì)選型結(jié)果進(jìn)行修正。要正確選型,我們至少要考慮這些因素:傳動(dòng)效率、輸送系統(tǒng)的平順性、工作制、必要的安全系數(shù)。
傳動(dòng)效率要考慮到是整個(gè)系統(tǒng)的,因?yàn)樗械臋C(jī)構(gòu)內(nèi)部阻力最后都會(huì)需要?jiǎng)恿磉M(jìn)行補(bǔ)償。輸送系統(tǒng)的平順性對(duì)整個(gè)系統(tǒng)的運(yùn)行影響最大,因?yàn)榧庸ぶ谱饔薪?jīng)濟(jì)性方面的考慮,出于現(xiàn)實(shí)因素常常不能保證較為理想的狀態(tài),當(dāng)狀態(tài)較差時(shí)會(huì)嚴(yán)重影響到電機(jī)拖動(dòng)的工作制,把一般視為平穩(wěn)拖動(dòng)的連續(xù)工作制S1的狀態(tài)變?yōu)樨?fù)載和轉(zhuǎn)速非周期性變化工作制S9,其對(duì)系統(tǒng)的平穩(wěn)運(yùn)行構(gòu)成較大挑戰(zhàn)。所以在考慮安全系數(shù)的時(shí)候,有必要充分考慮到以上所述各方面的影響。
4 結(jié)論
我們?cè)趯?shí)際應(yīng)用滾輪鏈輸送機(jī)的過程中,遭遇到了上述影響,因?yàn)橥斜P與鏈條間在運(yùn)行中不斷的相互撞擊,使得最終實(shí)際選取的動(dòng)力比按理想狀態(tài)計(jì)算的結(jié)果大了2.3倍左右,我們初次選型考慮了1.5倍的安全系數(shù),但是仍然不足,最終更換了動(dòng)力總成才保證了系統(tǒng)的穩(wěn)定運(yùn)行。
根據(jù)我們的實(shí)際經(jīng)驗(yàn),輸送系統(tǒng)平順、傳動(dòng)效率較高(90%以上)的,安全系數(shù)選取1.2~1.3左右比較合適;輸送系統(tǒng)平順稍差、傳動(dòng)效率較低(80~90%之間的)的,安全系數(shù)不應(yīng)低于1.5;輸送系統(tǒng)不平順、傳動(dòng)效率低(80%以下的)的,安全系數(shù)不應(yīng)低于2,復(fù)雜狀況應(yīng)仔細(xì)分析,必要時(shí)采取實(shí)測(cè)的手段也是不得已的。
綜上所述,因?yàn)檫@類輸送機(jī)的差異性,所以選型計(jì)算較為復(fù)雜,當(dāng)應(yīng)用規(guī)模較小時(shí),可以考慮比較大的安全系數(shù),即便因此造成能耗浪費(fèi)較多,但因?yàn)閿?shù)量少,又多為小功率,在節(jié)能環(huán)保方面綜合考慮還是可以接受。但是對(duì)于大規(guī)模應(yīng)用,耗能巨大時(shí),就應(yīng)該認(rèn)真計(jì)算,仔細(xì)核實(shí),甚至結(jié)合實(shí)際測(cè)量來選擇恰當(dāng)?shù)囊?guī)格,以免造成能源的巨大浪費(fèi)。
以上是我們?cè)趯?shí)際應(yīng)用中的經(jīng)驗(yàn),歡迎各位同業(yè)指出文中的有不足及謬誤之處。
[1]蘇州特種鏈條廠,中國(guó)機(jī)械工程學(xué)會(huì),鏈傳動(dòng)專業(yè)委員會(huì),et al.輸送鏈與特種鏈工程應(yīng)用手冊(cè)[M].北京:機(jī)械工業(yè)出版社,2000.59-62、68、74、78.
[2]馮畹芝.電機(jī)與電力拖動(dòng)[M].北京:中國(guó)輕工業(yè)出版社,1993.472-473.
[3]運(yùn)輸機(jī)械設(shè)計(jì)選用手冊(cè)編輯委員會(huì).運(yùn)輸機(jī)械設(shè)計(jì)選用手冊(cè)[M].下冊(cè),北京:化學(xué)工業(yè)出版社,1999.
[4]SEW,工程師手冊(cè)[Z].第一冊(cè),天津:SEW.