淺談汽車后視鏡視野測試方法
2015-07-27 06:12:31哈爾濱職業技術學院哈爾濱150081
山東工業技術 2015年16期
關鍵詞:方向
劉 軍(哈爾濱職業技術學院,哈爾濱 150081)
淺談汽車后視鏡視野測試方法
劉 軍
(哈爾濱職業技術學院,哈爾濱 150081)
本文從交通安全角度出發,探討了車輛駕駛過程中的后視鏡性能的局限性,提出了通過三維數字技術建模分析駕駛視野的研究思路。并根據研究結果提出了了系統與常規車輛匹配安裝的思路。可提高車輛和行人的安全性,獲得一定的社會效益。因此車輛行駛視野擴展技術的研究在車輛安全保障方面有存在的必要性。
盲區;駕駛視野;交通安全
在上世紀90年代前全國大多數城市增容效果還未凸顯,我國城鎮化剛剛起步不久,主要街路不多,且路面較窄,路面上行駛車輛也少,大多數時間里整條街路上在視野范圍內只有幾輛車,在此情況下行人的避讓和采取安全措施相對容易,車輛的駕駛過程中與其他車輛發生碰撞的幾率較低。路面承載能力亦可滿足車輛的需求。車輛上的盲區存在的危害在當時未能凸顯并引起重視。
隨著車保有量迅猛發展,道路情況變得日益復雜,道路上的車輛間距和人與車輛間距愈加縮小。現階段,無論在正常行車還是泊車過程中由于盲區存在已經極大危害到路上行人和車輛的安全。尤其在一些特殊情況下,如車輛通過狹窄路口時,前后車距可縮短至1m,左右車距可縮短至0.5m甚至更小的距離。在此情況下駕駛員掌握車輛周圍的情況已非常重要,視野范圍需進一步擴大才可能進一步保證交通安全。因此,需要從車輛出廠的國家標準、車輛上道的相關管理規定層面提出進一步消除盲區的概念。另一方面,應該從技術層面考慮消除盲區,也是一個應投入精力研究的重要方向。
1 現有的汽車駕駛盲區測量方法
1.1 目視法
目視法是在眼點的位置設置眼點的標記裝置,后視鏡視野測試人員于眼點標記位置通過內、外后視鏡觀察目標物來進行測試的方法。由于眼點的位置是測試的基準,因此該測試方法要求眼點位置準確。期中眼點的位置可通過幾種方法獲得:三坐標測量儀、三維掃描儀、三維H點人體模型。需要觀察的目標置于后視野范圍要求的地面上。要求目標高度不低于車上相關后視鏡的高度。優點是易行、簡單,缺點是人為因素的影響較大。
1.2 攝影法
攝影法是通過相機拍攝車外的物體在后視鏡中影像的方法。測試時,需要先確定眼點的位置,再將照相機的膠卷中心布置在的眼點位置上拍攝。是利用照相機來代替人眼的檢測視野方法。其優點是較適合單眼的情況,對所得的成像的比較相對直觀。缺點是難以確定照相機的位置,得到雙眼的測試結果,需要將兩個照片進行合成,而且這個過程易產生誤差。
1.3 燈光投影法
燈光投影法是在確定的眼點位置上放置模擬眼睛的點光源,通過后視鏡的反射光照到屏幕上,通過測量、計算對后視野進行評價的方法。
1.4 觀察法
觀察法是由燈光投影法發展來的。燈光投影法需要屏幕等裝置,測試結果需要作圖、計算,比較繁瑣,觀察法可省去部分步驟。觀察法是在眼點位置布置模擬眼睛的點光源。燈光通過左右外后視鏡反射到地面,在地面相關位置上放反射鏡,再通過反射鏡進行觀察。如果在反射鏡中看到點光源,則說明反射鏡在可視區域,否則不在可視區。對于整個后視野的狀況不能掌握;觀察法適合單眼和雙眼。直觀、簡單、易行;需要場地較大。
2 使用仿真軟件建立車輛三維空間模型并對形成的盲區進行分析
由于上述測試視野范圍的方法都受到場地設備等限制,在對與車輛駕駛視野相關的參數如后視鏡視野范圍、車身輪廓參數、后視鏡安裝角度、座椅調節范圍等進行研究時并不方便和快捷。因此將整個車輛外形參數和視野范圍制作成三維數據模型。產生了輔助設計,并使設計更加快捷和高效的效果。另外,方便更加直觀的進行與交通安全相關的研究。
2.1 建模軟件的簡介
SolidWorks為達索系統(Dassault Systemes S.A)下的子公司,專門負責研發與銷售機械設計軟件的視窗產品。使用了直觀式設計技術、Windows OLE技術以及先進的parasolid內核還有良好的與第三方軟件的集成技術。
2.2 理論依據和數學工具
按照反求工程為指導思想,即“計算機三維造型技術和測量技術的支撐,工程技術人員可以通過實物樣件快速獲取工程設計概念和設計模型。再通過模型進行形體尺寸、布局和結構材料的選擇等的結構分析。再進行包括裝配工藝、加工工藝等制造工藝的分析”。通過空間點測量確定數據模型,逐步增加選取點滴密度,從而實現提高精度控制。
使用過的數學工具包括:
(1)坐標矩陣變換
新坐標軸在舊坐標系中的方向余弦:
九個方向余弦,實際上只有三個獨立參數。
矩陣表示法:
實際上就是空間向量的正交分解合成法。
反過來,求舊坐標軸在新坐標系中的方向余弦,只需求原方向矩陣A的逆矩陣A-1即可。
|A|=±1:|A|=1為同手系變換,|A|=-1為異手系變換。|A|表示矩陣A的行列式。
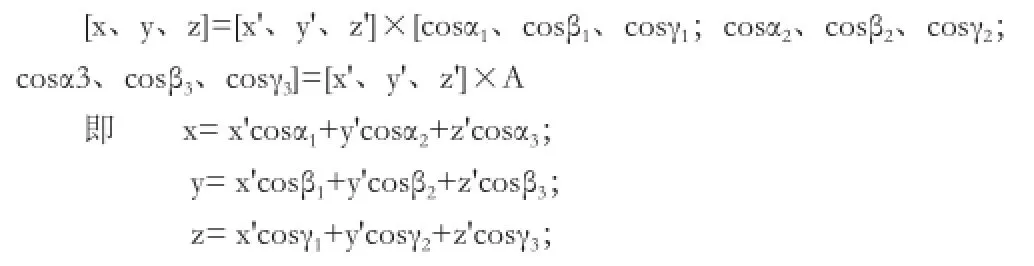
[x、y、z]=[x'、y'、z']×A
[x'、y'、z']=[x、y、z]×A-1.
當|A|=1時,A-1=AT(轉置矩陣),即A為正交矩陣。
(2)三維直角坐標系下法線平面、切平面確定
空間上一點(x0,y0,z0)的切平面方程為:

(3)使用matlab插值形成曲面和最小二乘法擬合曲面方法
插值和擬合都是數據優化的方法之一,實驗數據不夠多時常要用到這些方法來畫圖。在matlab中都有一些特定的函數來完成這些功能。這兩種方法的區別在于:測量值沒有誤差是準確的時,用插值法;測量值與真實值有誤差時用數據擬合法。一維曲線的插值,一般用函數yi=interp1(X,Y,xi,method) ,其中的method包括linear,nearst,cubic,spline。對二維曲面的插值,一般用函數zi=interp2(X,Y,Z,xi,yi,method),其中method常用的是cubic。對于一維曲線的擬合,一般用函數p=polyfi t(x,y,n)和yi=polyval(p,xi),是常用的最小二乘法的擬合方法。對二維曲面的擬合,可用Spline Toolbox里面的函數功能。
2.3 建模的方法和步驟
(1)坐標系的選取。依據ISO4130-1978《道路車輛三維參考系統和基準符號定義》和SAEJ182-2005《汽車基準符號和三維參考系統》確定坐標系。如圖1
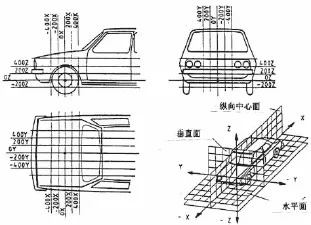
圖1 坐標系建立示意圖
在圖1中,使X為汽車的長度方向,Y為寬度方向,Z為高度方向 。
Z方向坐標零線——有車架的車,一般取沿車架縱梁上緣上表面平直且較長一段所在平面作為高度方向坐標的零平面;無車架的車輛可沿車身地板下表面平直且較長一段所在平面作為高度方向坐標的零平面。 當車身無較長直線段(多為曲線時),取前輪理論中心線的水平線。零平面上方為正,零平面下方為負。
X方向坐標零線——將通過汽車前輪理論中心線并垂直于高度方向零平面的平面作為長度方向坐標的零平面。零平面前方為負,零平面后方為正。
Y方向坐標零線——把汽車的縱向對稱中心平面作為寬度方向坐標的零平面。 零平面左側為正,零平面右側為負。
(2)通過三坐標測量儀的獲得車輛在不同水平界面上沿車身外輪廓x軸方向選取15個點,y軸方向選取10個點,按照50mm長度在z軸上升高獲得不同層的數據直到車輛頂部。輸入完成車輛外部輪廓的曲面的建立。
(3)駕駛員眼點確定。根據總體布置的要求所確定的駕駛員設計乘坐位置中心,作一平行于汽車縱向基準面的平面。從該平面內的駕駛員 R 點垂直向上 635 mm,作垂直于該平面的一條直線段。在直線段與該平面交點的兩側各 32.5 mm 處(總距離 65 mm)作兩個點,這兩點即為駕駛員的眼點。
(4)在裝配變曲率后視鏡時通過將使用點陣最小二乘法擬合的后視鏡鏡面進行構造和裝配。通過實體的移動和旋轉完成與三維直角坐標的矩陣變換的等效動作。
(5)通過放樣和延伸命令形成椎體與地面或屏幕相交確定駕駛視野范圍 。
(6)通過眼點向變曲率后視鏡做連線,確定視線的入射點,再通過入射點做后視鏡曲面的法線,通過鏡像命令構造反射光線。再將反射光線延長到投影屏幕中。形成視野范圍上的一點。
(7)通過在后視鏡輪廓線選取20樣本點,按照上一步驟做法,在投影區域內形成20點,再通平面上樣條曲線連接個點,完成投影區域輪廓。當樣本數量逐漸增大時,投影區域內個點連線形成的面接近真實投影面積。再通過曲面工具里的平面工具和測量命令可直接獲得投影面積具體數值。
(8)通過眼點與車輛擋風玻璃和側車窗進行放樣曲面操作,直接獲得駕駛員視野區域。
2.4 汽車駕駛視野范圍和盲區的確定
如圖2、3所示,根據生成的三維數據模型,通過觀察可知。車輛盲區的范圍主要分布在車輛下部的裙狀不規則區域和車頭、車尾以及A、B柱方向上。
圖2所示錐狀區域為車輛尾部的間接駕駛視野范圍和盲區范圍,其中尾部駕駛視野盲區是指車輛輪廓后部到車輛后視野與地平面相交線之間的一片立體區域與C柱盲區連為一體。
如圖3所示呈喇叭狀區域為車輛頭部直接視野范圍。車頭盲區是指前下方駕駛員視野與地平面相交的部分。車輛頭部盲區為車輛前下方駕駛員視線與地面交線之間圍成的區域。
可按照車輛不同的行駛狀態,劃分盲區的重要性。并針對該狀態下的重點隱患盲區選取排除方案。
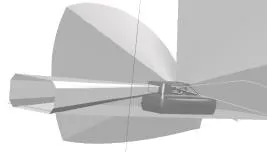
圖2 車輛尾部盲區范圍

圖3 車輛頭部盲區范圍
2.5 駕駛視野的分布和測量
通過數據生成駕駛視野立體區域,并向車輛前部、側面和車輛尾部方向上一定距離上投影,并對投影區域面積進行計算,并選取不同的角度按照不同的步長輸入系統進行表投影面積的大小。獲得最佳的布置角度。
使用曲面鏡外后視鏡駕駛視野分布。如圖4、5,后視鏡為曲面的前提下,在按照要求調整后視鏡角度后,獲得的視野區域為:左側車輛10m處視野寬度為5290mm,大于國家標準的2500mm。右側30m處寬度為9013.4mm大于3500mm的國家標準。通過模型的分析測量功能,可直接測量不同后視鏡加裝后的使用效果。
3 結論
本文的主要工作為,介紹在已有理論基礎上建立三維數據模型的方法和步驟,并將經過校驗的后視鏡成型曲面構造到三維模型中。并驗證通過三維數據模型進行測量和指導設備選取的功能。經過與以往的測試方法比較,使用仿真軟件建模的方法可以直觀測量不同后視鏡在車身后10m、20m等投影幕上的視野范圍。可以量化觀測到的路面寬度的具體數值,甚至可直接得出投影幕上的視野面積。
另外,從數據模型中可以看到視野范圍的三維形狀,通過調整后視鏡角度參數即可直接得出不同的視野范圍,具有直觀、方便的特點。有利于車身設計和安全分析。相對于傳統的后視野測試方法具有明顯的優勢。
[1]趙云,唐如亞,陳華杰.后視鏡布置與視野安全性分析[J].機電技術,2012,28(05):90-109.
[2]GB15084-2006,機動車輛后視鏡的性能和安裝要求[S].
[3]黃天澤,黃金陵.汽車車身結構與設計[M].北京:機械工業出版社,2006.
劉軍(1977-),男,東北林業大學,載運工具運用工程專業,哈爾濱職業技術學院機械工程學院講師。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50