
基于輪胎標識點的輪胎分類系統研究
2015-07-28 12:10:38邢金鵬
橡膠工業 2015年12期
王 勇,郭 慧*,邢金鵬
(1.華東理工大學 機械與動力工程學院,上海 200237;2.聊城大學東昌學院 機電工程學院,山東 聊城 252000)
中國作為汽車保有量大國,輪胎的需求量隨汽車數量的增長與日俱增,然而輪胎的分類問題一直困擾輪胎生產廠家。現有文獻分析表明,目前我國絕大多數輪胎生產廠家仍然采用人工分類的方法,不僅效率低,而且易出現誤檢、錯分等現象[1]。
隨著工業自動化技術的發展,輪胎制造業也不斷地應用新技術,從而優化輪胎生產制造工藝過程[2-3]。機器視覺作為新興技術,在工業自動化中得到廣泛應用[4-6]。
為解決輪胎制造過程中的輪胎分類問題,本工作基于機器視覺的理論基礎和VC++開發平臺,依據工業輪胎分類的實際需求,研發一種基于輪胎標識點的輪胎自動分類系統。該輪胎分類系統主要由輪胎標識點圖像采集裝置、標識點圖像處理系統和輪胎分類執行系統組成,旨在實現輪胎的有效分類,提高輪胎制造業的效益。
1 工作原理
本工作研究的輪胎分類系統主要由硬件設備和軟件系統構成。硬件設備主要用于輪胎標識點圖像的采集。軟件系統由VC++開發平臺設計完成,主要用于輪胎標識點圖像的識別。輪胎標識點圖像如圖1所示。

圖1 輪胎標識點圖像
輪胎分類系統首先利用硬件設備采集圖1中的輪胎標識點圖像,然后將采集到的輪胎標識點圖像輸送到分類系統的軟件部分,識別出獲取的輪胎標識點圖像顏色和形狀信息。最后,分類系統將輪胎標識點圖像信息輸送給輪胎分類執行系統,依據輪胎標識點信息,驅動執行機構實現輪胎的分類。輪胎分類系統工作原理如圖2所示。
圖2 輪胎分類系統工作原理
2 硬件部分
輪胎分類系統的硬件設備主要由工業相機、工業電腦、照明裝置和支架組成,用于輪胎標識點圖像的采集。因此也可以將輪胎分類系統的硬件部分視為輪胎標識點圖像采集裝置,其結構如圖3所示。
由于打碼機在輪胎的側面印刷上標識點后,輪胎隨機掉落在輸送帶上,因此不能保證印有標識點的一側朝向一致。為保證能夠采集到所有的輪胎標識點圖像,設計了如圖3所示的上下光源和相機結構。
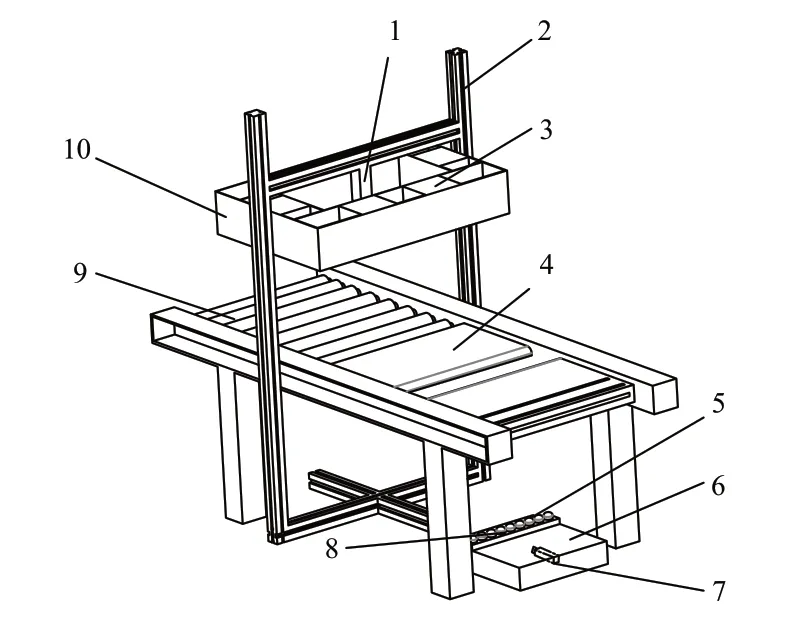
圖3 輪胎分類系統結構示意
2.1 硬件控制系統
輪胎標識點圖像采集裝置僅僅是圖像采集的硬件設備,要準確獲取輪胎標識點圖像,還需要驅動硬件設備的控制系統。本工作采用可編程控制器(PLC)結合光電開關和旋轉編碼器設計圖像采集控制系統。
光電開關安裝在導軌的兩側,用于檢測輪胎到來的信號。旋轉編碼器置于輸送帶下側,且安裝在編碼器上的旋轉輪與輸送帶緊密貼合。旋轉編碼器安裝位置如圖4所示。

圖4 旋轉編碼器安裝位置示意
當光電開關檢測到輸送帶上有輪胎到來的信號時,光電開關將該信號輸送給PLC控制器,PLC隨即啟動旋轉編碼器的計數功能。當旋轉編碼器計數到設定值T1時,PLC啟動上相機對輪胎上側面進行拍攝;當旋轉編碼器計數到設定值T2時,PLC啟動下相機對輪胎下側面進行拍攝。圖像采集裝置控制系統工作原理如圖5所示。
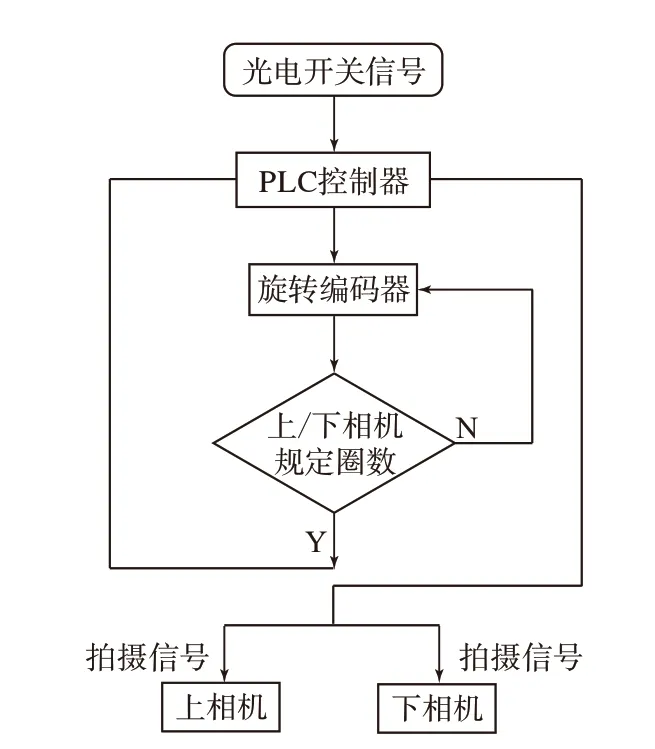
圖5 圖像采集裝置控制系統工作原理
2.2 上相機與光源
對于分布在輪胎上側面的標識點,可以采用一次拍照而獲取完整的標識點圖像。因此將上相機和光源設計成如圖6所示的相機外露式。同時,為消除外界光照對拍攝圖像質量的影響,采用光照均勻、工作壽命長且易于設計的發光二極管(LED)外加光源[7]。
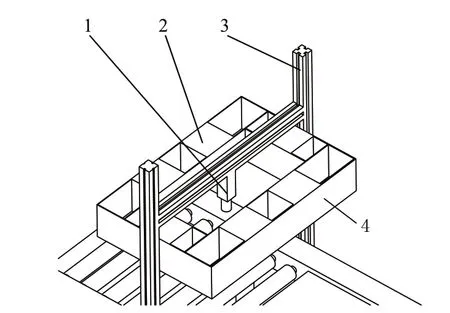
圖6 上相機和光源結構示意
2.3 下相機與光源
受圖像采集裝置結構設計和實際應用的限制,對分布于輪胎下側面的輪胎標識點拍攝一次不能采集完整的輪胎標識點圖像。通過設置相機拍攝的感興趣區域寬度,對同一輪胎進行多次拍照(一般拍攝6次),獲取條狀輪胎標識點圖像,最后通過圖像拼接技術,將其拼接成一幅完整的輪胎標識點圖像,如圖7所示。
下相機和光源結構如圖8所示。如果直接采用工業相機對輪胎下側面的輪胎標識點圖像進行拍攝,相機與輪胎之間的距離過小會導致景深不能滿足拍攝要求,因此在設計下相機圖像采集裝置時,利用鏡面反射原理,通過反光鏡的鏡面反射增大相機與輪胎下側面之間的距離,滿足下相機拍攝對景深的要求。
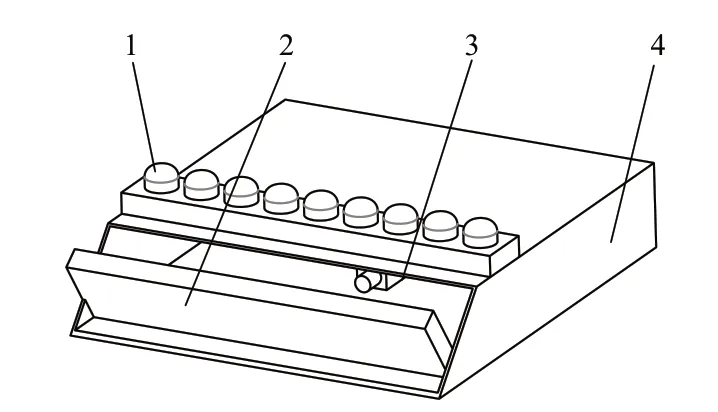
圖8 下相機和光源結構示意
3 軟件系統
圖像處理軟件是該輪胎分類系統的核心,軟件的設計主要包括輪胎標識點圖像降噪處理、標識點顏色和形狀特征向量的提取、標識點顏色識別器和形狀識別器的構建。在軟件設計時采用VC++軟件作為設計平臺,結合LIBSVM軟件包[8],設計了如圖9所示的輪胎分類系統可視化平臺。

圖9 輪胎分類系統可視化平臺
3.1 標識點圖像降噪
利用圖像采集裝置采集到的輪胎標識點圖像,在電路中傳輸時,會在圖像中引入噪聲,導致圖像質量降低。為消除圖像噪聲對標識點圖像識別的影響,在標識點識別前,采用中值濾波技術對圖像進行降噪處理。中值濾波能夠在去除圖像噪聲的同時,保護圖像邊緣信息不受破壞[9],為后續標識點識別奠定基礎。
3.2 標識點圖像顏色特征量提取
采用CCD工業相機獲取的輪胎標識點圖像存儲為RGB顏色空間,該空間的R,G和B三個顏色分量具有較高的相關性,不適于顏色識別研究。為此,本工作在進行標識點顏色識別前,將原始圖像從RGB顏色空間轉換到HLS顏色空間,HLS顏色空間中的色度向量能夠較為準確地區分不同種顏色特性。因此,在識別標識點顏色時,只需要識別不同顏色的色度向量即可,提高了顏色識別的效率。
3.3 標識點圖像形狀特征量提取
形狀識別是標識點識別的另一項重點研究內容。本工作采用復數傅里葉子系數描述作為輪胎標識點形狀識別的特征向量。在提取標識點形狀傅里葉描述子系數前,先要對降噪后的標識點圖像進行圖像分割、邊緣檢測和輪廓坐標提取等操作。然后,對標識點輪廓坐標進行傅里葉變換,獲取描述標識點形狀特征的傅里葉描述子系數。
3.4 標識點識別器的構建
采用機器視覺技術中較為常用的支持向量機(Support Vector Machine,SVM)人工智能算法,進行輪胎標識點識別器的構建。支持向量機是由V.Vapnik[10]提出的一種經典人工智能算法。由于典型的支持向量機僅適用于兩類分類問題,而本研究的輪胎標識點涉及紅、黃、藍、白4種顏色和方形、圓形、菱形、圓環、十字形5種形狀,屬于多類別分類問題,因此直接采用典型支持向量機算法不能達到有效分類的效果。
采用由J.C.Platt等[11]提出的導向無環圖多類支持向量,構建輪胎標識點識別器。應用J.C.Platt等提出的決策導向無環圖支持向量機分類算法,可有效解決多類別分類問題。該算法通過在N類樣本中構建N(N-1)/2個二值樣本分類器,并利用這N(N-1)/2個樣本分類器對每類樣本進行“淘汰”測試,以識別樣本種類。
4 輪胎分類執行系統
輪胎標識點識別器識別出輪胎標識的顏色和形狀信息后,將該信息輸送給輪胎分類執行系統。分類執行系統根據輪胎標識點信息,將輪胎分類至相應類別。輪胎分類執行系統實物如圖10所示。本工作依據實際要求,設計了3套輪胎分類機構,每套輪胎分類機構代表一種類型的輪胎。當輪胎在輸送帶上輸送到相應分類機構處時,分類器將其從輸送導軌上撥離至分類導軌,從而實現輪胎的分類輸送。

圖10 輪胎分類系統
5 結語
針對輪胎制造過程中輪胎分類入庫困難的問題,設計研制一種基于輪胎標識點的輪胎自動分類系統。該系統通過采集并識別打印在輪胎側面的輪胎標識點信息,依據輪胎標識點的顏色和形狀信息的不同,將輪胎劃分為相應種類,實現了輪胎的自動高效分類。應用該系統能夠有效地提高輪胎分類效率,顯著提高輪胎制造業的生產效益。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
