基于SolidWorks的轉(zhuǎn)向裝置的設(shè)計與強(qiáng)度分析
2015-08-06 23:57:46劉海張俊峰曾凡琮高星星龐雄斌
天津農(nóng)業(yè)科學(xué) 2015年8期
劉海 張俊峰 曾凡琮 高星星 龐雄斌
摘 要:轉(zhuǎn)向裝置是漁藥噴施機(jī)的關(guān)鍵工作部件,它直接影響噴施機(jī)的噴施效果。本文在目前國內(nèi)研發(fā)出的噴施機(jī)的基礎(chǔ)上,設(shè)計了一種新型的轉(zhuǎn)向器。為研究其強(qiáng)度特性,減少工作時的故障,應(yīng)用SolidWorks建立了轉(zhuǎn)向器的三維模型,用Simulation對其進(jìn)行了有限元分析,得到轉(zhuǎn)向器在工作時的變形和應(yīng)力大小,找出了其強(qiáng)度薄弱點。然后,對轉(zhuǎn)向器進(jìn)行了改進(jìn)設(shè)計,并應(yīng)用Simulation進(jìn)行靜態(tài)分析。結(jié)果表明,改進(jìn)后的轉(zhuǎn)向器的強(qiáng)度和剛度明顯提高,可為其優(yōu)化設(shè)計提供參考依據(jù)。
關(guān)鍵詞:轉(zhuǎn)向裝置;漁藥;噴施機(jī);轉(zhuǎn)向器;有限元分析
中圖分類號:TP391 文獻(xiàn)標(biāo)識碼:A DOI 編碼:10.3969/j.issn.1006-6500.2015.08.008
漁藥的使用是水產(chǎn)養(yǎng)殖中一個必不可少的環(huán)節(jié)[1]。國內(nèi)目前研究出了一種無線遙控漁藥噴施機(jī),該噴施機(jī)噴灑漁藥時不僅可以減輕勞動強(qiáng)度,還可以保障操作人員的安全,其平均行駛速度為0.8 m·s-1 [2-3]。但是,該機(jī)仍然存在著速度不高、無法剎車、轉(zhuǎn)彎半徑大以及無法倒車等問題。
針對上述問題,筆者設(shè)計出了一種用于漁藥噴施機(jī)的新型轉(zhuǎn)向裝置,并且對其結(jié)構(gòu)進(jìn)行了有限元分析[4-5]。本研究利用Solidworks軟件中的Simulation對漁藥噴施機(jī)轉(zhuǎn)向裝置的結(jié)構(gòu)和強(qiáng)度進(jìn)行了分析,以為其優(yōu)化設(shè)計提供參考依據(jù)[6-7]。
1 材料和方法
1.1 轉(zhuǎn)向裝置的設(shè)計、結(jié)構(gòu)及工作原理
轉(zhuǎn)向裝置的設(shè)計。轉(zhuǎn)向裝置是漁藥噴施機(jī)的關(guān)鍵部件,是直接與噴水推進(jìn)裝置配合使用的部件。噴水推進(jìn)是近20余年來快速發(fā)展成熟起來的一種特殊的推進(jìn)方式,它利用噴水推進(jìn)裝置中推進(jìn)泵噴出的高速水流的反作用力推動水中載體前進(jìn)[8]。噴水推進(jìn)作為一種特殊的船舶推進(jìn)裝置,具有保護(hù)性能好、噪音低、傳動機(jī)構(gòu)簡單、適應(yīng)變工況能力強(qiáng)、船舶操縱性能佳等特點[9]。噴水推進(jìn)裝置只能提供動力,噴施機(jī)的轉(zhuǎn)向及倒車則是通過轉(zhuǎn)向裝置實現(xiàn)的。轉(zhuǎn)向裝置的結(jié)構(gòu)不僅決定了噴施機(jī)的行進(jìn)速度,而且還影響著漁藥噴施的范圍、路線,進(jìn)而影響漁藥噴施的效果,從而導(dǎo)致水產(chǎn)養(yǎng)殖產(chǎn)量的減少,使養(yǎng)殖戶的收入減少。
在船舶操縱系統(tǒng)中,航向和航速控制是船舶控制最基本和最關(guān)鍵的[10-13], 而噴水推進(jìn)式船舶與普通船舶不同,其在航向和航速的控制上存在著較大難度。比如說因為噴水方向改變,不僅使推力產(chǎn)生的力矩比舵操縱船舶大,而且會給船舶的推進(jìn)力帶來損失。因此,本研究所設(shè)計的轉(zhuǎn)向裝置應(yīng)既能滿足該船的控制要求,又能達(dá)到倒車的目的。
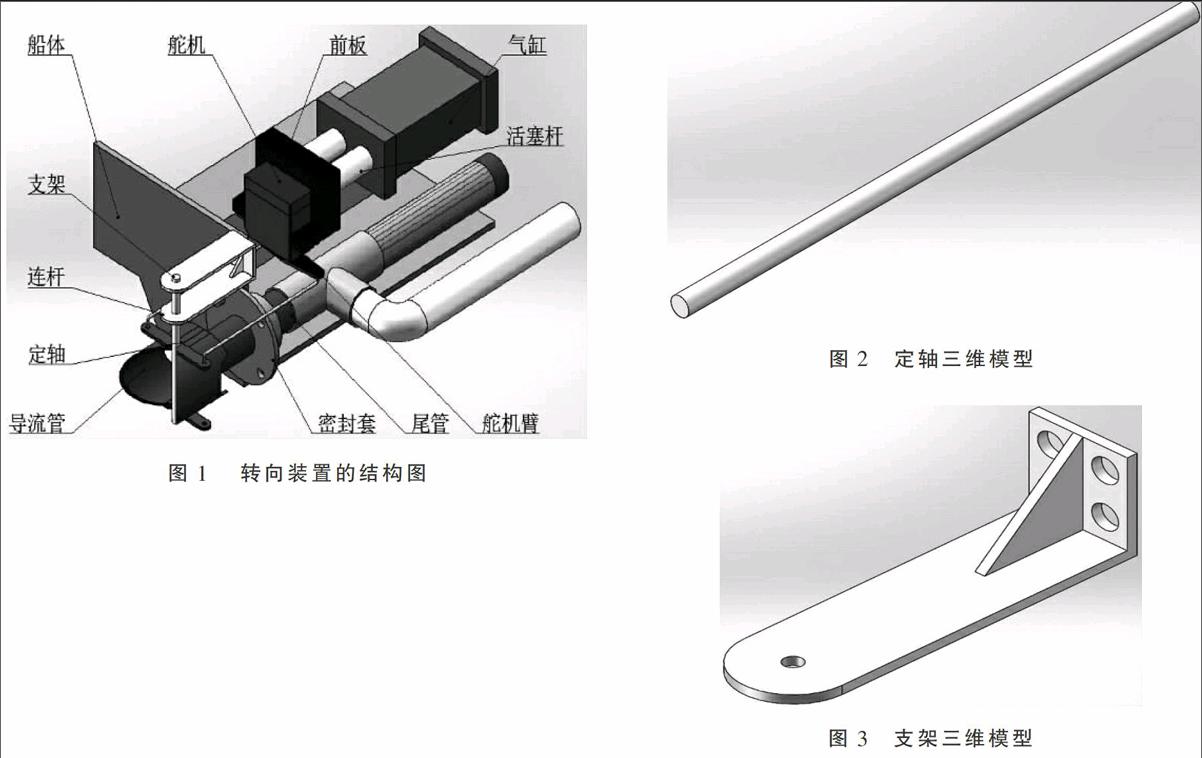
轉(zhuǎn)向裝置的結(jié)構(gòu):轉(zhuǎn)向裝置主要由氣缸、活塞桿、前板、舵機(jī)、舵機(jī)臂、連桿、導(dǎo)流管、定軸、尾管、支架組成,其結(jié)構(gòu)如圖1 所示。
轉(zhuǎn)向裝置的工作原理。轉(zhuǎn)向裝置安裝于船體上,氣缸通過螺栓固定在船上,為雙桿雙軸氣缸,其中兩個活塞桿用于平衡,并通過氣缸做往復(fù)直線運(yùn)動。前板與活塞桿相連,隨活塞桿做直線運(yùn)動。舵機(jī)用螺絲固定在前板上,舵機(jī)可以用相配套的控制器控制擺動。舵機(jī)臂與舵機(jī)相連,并可以圍繞軸擺動。兩個連桿一端與兩相配合的導(dǎo)流管相連,另一端與舵機(jī)臂兩端相連,兩個連桿隨舵機(jī)臂運(yùn)動。導(dǎo)流管需要兩個配合使用,兩個導(dǎo)流管上各裝有一連桿,兩相配合的導(dǎo)流管通過定軸固定上下位置,而且可圍繞定軸擺動。定軸與上下兩支架相連。尾管與固定在船上的密封套配合,尾管軸線與兩相配合的導(dǎo)流管的中心線重合,并伸入兩相配合的導(dǎo)流管內(nèi)。支架用螺栓固定在船上,兩支架頂端與定軸固定。兩導(dǎo)流管通過各自的連桿靠舵機(jī)臂的帶動來改變方向。兩導(dǎo)流管靠氣缸推動活塞桿及舵機(jī)的回中固定進(jìn)行開閉,通過這種組合動作使船實現(xiàn)倒車或剎車。
1.2 轉(zhuǎn)向裝置支架有限元模型
轉(zhuǎn)向裝置中的定軸可以看做是懸臂梁,而兩支架由于水流沖擊導(dǎo)流管的原因會產(chǎn)生傾覆力,所以分別對兩構(gòu)件進(jìn)行分析。定義沿支架的基準(zhǔn)軸為Y方向,垂直于支架筋為X方向,平行于尾管方向為Z方向。
轉(zhuǎn)向裝置模型的建立:用SolidWorks軟件分別建立定軸與支架的三維模型,如圖 2和圖3 所示。為了研究兩者的強(qiáng)度特性,計算工作載荷下的變形,將模型進(jìn)行簡化和抽象,忽略一些圓角以及很小實體。
載荷的確定。定軸與導(dǎo)流管相連,根據(jù)在水中的試驗數(shù)據(jù)得知,噴施機(jī)的推進(jìn)力為42 N,噴施機(jī)空載時的平均速度約為1.46 m·s-1。當(dāng)導(dǎo)流管與噴水方向垂直時定軸受力最大。又因水流從噴口到導(dǎo)流管之間有一定距離會產(chǎn)生一定損失,根據(jù)孫存樓等人使用的噴水推進(jìn)器推力的動量計算法[14],取水力損失系數(shù)εn=0.025。則確定定軸載荷為4.2 N×(1-0.025)=4.095 N。
1.3 靜態(tài)分析
用Simulation對裝配的定軸及支架進(jìn)行靜態(tài)分析,目的是分析在作業(yè)載荷下的變形和應(yīng)力大小,校核定軸及支架的強(qiáng)度,以進(jìn)一步優(yōu)化轉(zhuǎn)向裝置的結(jié)構(gòu)。
設(shè)計裝配體材料屬性如表1 所示。根據(jù)試驗情況和計算結(jié)果,模擬以8個螺絲固定住兩個成對使用的支架,在距離定軸底部31 mm處均勻施加載荷4.095 N。
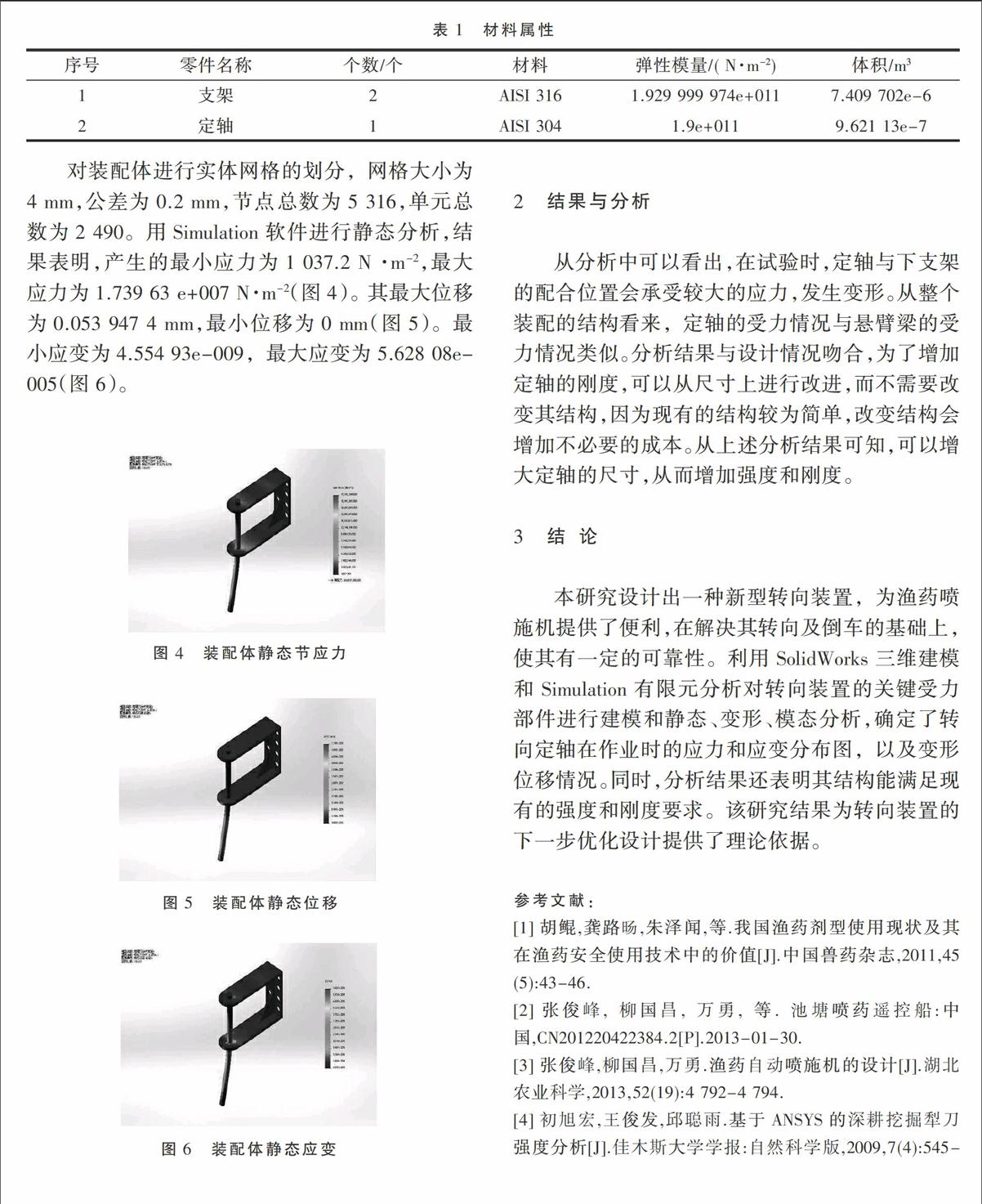
對裝配體進(jìn)行實體網(wǎng)格的劃分,網(wǎng)格大小為4 mm,公差為0.2 mm,節(jié)點總數(shù)為5 316,單元總數(shù)為2 490。用Simulation軟件進(jìn)行靜態(tài)分析,結(jié)果表明,產(chǎn)生的最小應(yīng)力為1 037.2 N ·m-2,最大應(yīng)力為1.739 63 e+007 N·m-2(圖4)。其最大位移為0.053 947 4 mm,最小位移為0 mm(圖5)。最小應(yīng)變?yōu)?.554 93e-009,最大應(yīng)變?yōu)?.628 08e-005(圖6)。
2 結(jié)果與分析
從分析中可以看出,在試驗時,定軸與下支架的配合位置會承受較大的應(yīng)力,發(fā)生變形。從整個裝配的結(jié)構(gòu)看來,定軸的受力情況與懸臂梁的受力情況類似。分析結(jié)果與設(shè)計情況吻合,為了增加定軸的剛度,可以從尺寸上進(jìn)行改進(jìn),而不需要改變其結(jié)構(gòu),因為現(xiàn)有的結(jié)構(gòu)較為簡單,改變結(jié)構(gòu)會增加不必要的成本。從上述分析結(jié)果可知,可以增大定軸的尺寸,從而增加強(qiáng)度和剛度。
3 結(jié) 論
本研究設(shè)計出一種新型轉(zhuǎn)向裝置,為漁藥噴施機(jī)提供了便利,在解決其轉(zhuǎn)向及倒車的基礎(chǔ)上,使其有一定的可靠性。利用 SolidWorks 三維建模和 Simulation 有限元分析對轉(zhuǎn)向裝置的關(guān)鍵受力部件進(jìn)行建模和靜態(tài)、變形、模態(tài)分析,確定了轉(zhuǎn)向定軸在作業(yè)時的應(yīng)力和應(yīng)變分布圖,以及變形位移情況。同時,分析結(jié)果還表明其結(jié)構(gòu)能滿足現(xiàn)有的強(qiáng)度和剛度要求。該研究結(jié)果為轉(zhuǎn)向裝置的下一步優(yōu)化設(shè)計提供了理論依據(jù)。
參考文獻(xiàn):
[1] 胡鯤,龔路旸,朱澤聞,等.我國漁藥劑型使用現(xiàn)狀及其在漁藥安全使用技術(shù)中的價值[J].中國獸藥雜志,2011,45(5):43-46.
[2] 張俊峰,柳國昌,萬勇,等.池塘噴藥遙控船:中國,CN201220422384.2[P].2013-01-30.
[3] 張俊峰,柳國昌,萬勇.漁藥自動噴施機(jī)的設(shè)計[J].湖北農(nóng)業(yè)科學(xué),2013,52(19):4 792-4 794.
[4] 初旭宏,王俊發(fā),邱聰雨.基于ANSYS的深耕挖掘犁刀強(qiáng)度分析[J].佳木斯大學(xué)學(xué)報:自然科學(xué)版,2009,7(4):545-546.
[5] 何磊,曹衛(wèi)彬,李樹峰.基于SolidWorks的破茬開溝犁刀的設(shè)計與強(qiáng)度分析[J].安徽農(nóng)業(yè)科學(xué),2011,39(3):1 819-1 821.
[6] 曹鋒,馮如.SolidWorks 2007中文版從入門到精通[M].北京:人民郵電出版社,2008.
[7] SolidWorks公司.SIMULATION基礎(chǔ)教程[M].北京:機(jī)械工業(yè)出版社,2007.
[8] 王立祥.噴水推進(jìn)及噴水推進(jìn)泵[J].通用機(jī)械,2007(10) : 12-15.
[9] 王立祥,王澤群.噴水推進(jìn)組合體—種新穎的船舶節(jié)能推進(jìn)操縱裝置[J].船舶, 1994(2): 11-16.
[10] 金鴻章,姚緒良.船舶控制原理[M].哈爾濱:哈爾濱工程大學(xué)出版社,2001.
[11] 吳秀恒,劉祖源,施生達(dá),等.船舶操縱性[M].北京:國防工業(yè)出版社,2005.
[12] 程啟明,萬德鈞.船舶操縱的控制技術(shù)發(fā)展綜述[J].東南大學(xué)學(xué)報,1999,1(1):10-17.
[13] Abkowitz M A. Lectures on ship hydrodynamics-steering and maneuverabolity[M]. Lyngby, Denmark:Hydro and Aerodynamics Laboratory, Report Hy-5, 1964.
[14] 孫存樓,王永生,丁江明,等.噴水推進(jìn)器推力的動量計算法[J].武漢理工大學(xué)學(xué)報:交通科學(xué)與工程版,2006,30(6):1 098-1 101.
