自動(dòng)導(dǎo)引小車(AGV)運(yùn)動(dòng)學(xué)模型研究和動(dòng)力學(xué)仿真
2015-08-12 08:16:54陳卓
河南科技 2015年1期
陳 卓
(中國人民解放軍海軍七〇一工廠,北京 100015)
自動(dòng)導(dǎo)引小車(Automated Guided Vehicle 簡 稱AGV),是指裝備有電磁或光學(xué)自動(dòng)導(dǎo)引裝置,能夠沿規(guī)定的導(dǎo)引路徑行駛,具有編程與停車選擇裝置、安全保護(hù)以及各種移載功能的運(yùn)動(dòng)小車[1]。AGV 是一種具有復(fù)雜裝置和系統(tǒng)的自動(dòng)化機(jī)器人, 是現(xiàn)代制造和物流等企業(yè)中的重要設(shè)備,主要用來儲運(yùn)各類物料,為系統(tǒng)柔性化、集成化、高效運(yùn)行提供了重要而有效的保證[2]。 本文在AGV車體動(dòng)力學(xué)的基礎(chǔ)上,綜合考慮了電機(jī)的輸出轉(zhuǎn)矩、車體質(zhì)量分布和各種阻力對車速的影響, 最終可得到驅(qū)動(dòng)電機(jī)輸入轉(zhuǎn)矩與導(dǎo)向車輪轉(zhuǎn)速的非線性耦合關(guān)系, 這對指導(dǎo)車體的機(jī)械結(jié)構(gòu)設(shè)計(jì)和合理路徑規(guī)劃等相關(guān)研究有重要意義。
1 AGV 車體運(yùn)動(dòng)模型
1.1 車體運(yùn)動(dòng)建模
本文研究的AGV 采用三輪結(jié)構(gòu)形式,即兩后輪分別由獨(dú)立電機(jī)差速驅(qū)動(dòng),前輪為萬向輪。
AGV 車體部分的受力如圖1 所示。 A 為前輪與車架的連接點(diǎn),L、R 為左右后輪與車架的連接點(diǎn),C 為車架的質(zhì)心,通過質(zhì)心C 建立瞬時(shí)慣性坐標(biāo)系O—XYZ。

圖1 車體動(dòng)力學(xué)模型
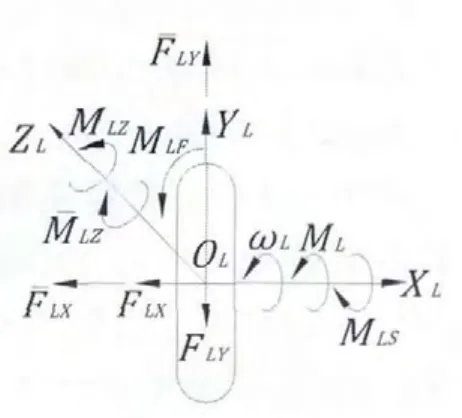
圖2 左后輪受力示意圖
可根據(jù)達(dá)郎貝爾原理列[3]出車體動(dòng)力學(xué)平衡方程:
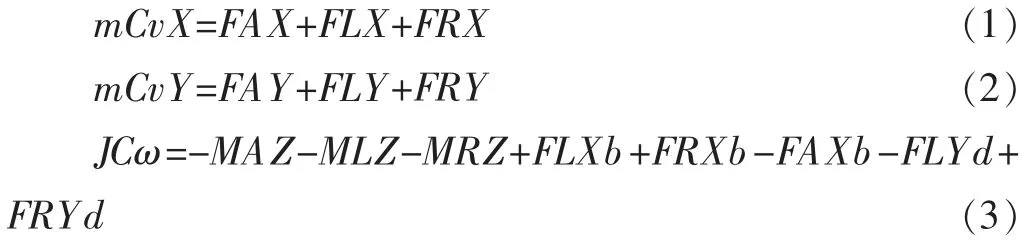
式中,mC—車體質(zhì)量;vX,vY—車體C 點(diǎn)沿X,Y 方向加速度;FAX,F(xiàn)AY—車體A 點(diǎn)沿X,Y 方向受力;FLX,F(xiàn)LY—車體L 點(diǎn)沿X,Y 方向受力;FRX,F(xiàn)RY—車體R 點(diǎn)沿X,Y 方向受力;JC—車體質(zhì)心C 繞Z 軸轉(zhuǎn)動(dòng)慣量;ω—車體質(zhì)心C 繞Z 軸角加速度;MAZ,MLZ,MRZ—車體A,L,R 點(diǎn)處所受轉(zhuǎn)矩。
車體A,L,R 點(diǎn)運(yùn)動(dòng)方程如下:

式 中,vAX,vAY—車 體A 點(diǎn) 沿X,Y 方 向 速 度;vAX,vAY—車體A 點(diǎn)沿X,Y 方向加速度;vLX,vLY—車體L 點(diǎn)沿X,Y 方向速度;vRX,vRY—車體R 點(diǎn)沿X,Y 方向速度;vLX,vLY—車體L 點(diǎn)沿X,Y 方向加速度;vRX,vRY—車體R 點(diǎn)沿X,Y 方向加速度。
1.2 車體左右后輪運(yùn)動(dòng)建模
車體左后輪的受力如圖2 所示。 圖中瞬時(shí)慣性坐標(biāo)系OL—XLYLZL 與圖1 中O—XYZ 方向一致。
左后輪運(yùn)動(dòng)方程如下:

式中,mL—左后輪質(zhì)量;RL—左后輪半徑;FLX—地面對左后輪側(cè)滑摩擦力;FLY—地面對左后輪滾動(dòng)摩擦力;MLZ—地面對左后輪扭轉(zhuǎn)摩擦力矩;ωL,ωLZ—左后輪繞XL,ZL 軸角加速度;JLX,JLZ—左后輪繞XL,ZL 軸的轉(zhuǎn)動(dòng)慣量;ML—左后輪驅(qū)動(dòng)電機(jī)傳遞給左后輪的轉(zhuǎn)矩;MLS,MLF—左后輪受到軸承的摩擦阻力矩和地面對左后輪的滾動(dòng)阻力矩。
同理右后輪運(yùn)動(dòng)方程如下:
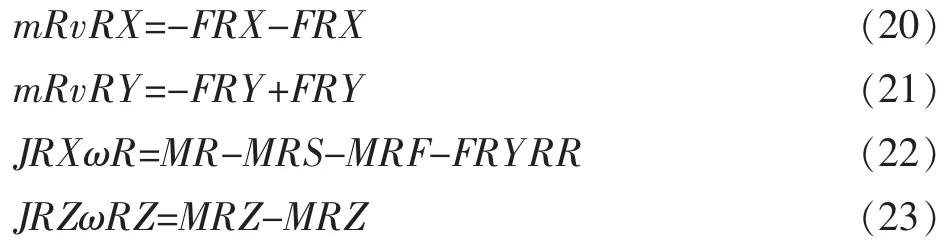
式中,mR—右后輪質(zhì)量;RR—右后輪半徑;FRX—地面對右后輪側(cè)滑摩擦力;FRY—地面對右后輪滾動(dòng)摩擦力;MRZ—地面對右后輪扭轉(zhuǎn)摩擦力矩;ωR,ωRZ—右后輪繞XL,ZL 軸角加速度;JRX,JRZ—右后輪繞XL,ZL 軸的轉(zhuǎn)動(dòng)慣量;MR—右后輪驅(qū)動(dòng)電機(jī)傳遞給右后輪的轉(zhuǎn)矩;MRS,MRF—右后輪受到軸承的摩擦阻力矩和地面對右后輪的滾動(dòng)阻力矩。
在實(shí)際工業(yè)應(yīng)用中,AGV 側(cè)向滑動(dòng)很小, 即可假設(shè):vLX=vRX=0(24)。 這樣車體將以位于左右輪軸線上的某一點(diǎn)O'為瞬時(shí)速度中心以角速度ω 轉(zhuǎn)動(dòng),如圖3 所示。
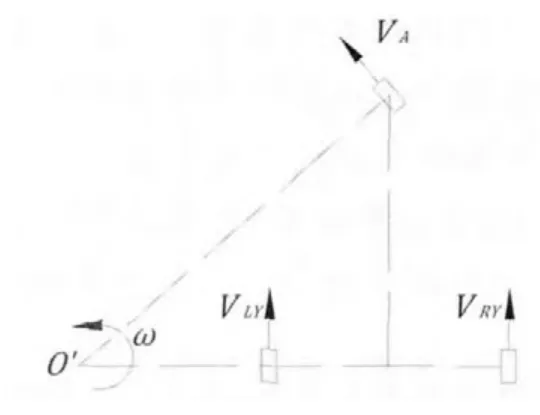
圖3 車體及車輪轉(zhuǎn)動(dòng)示意圖
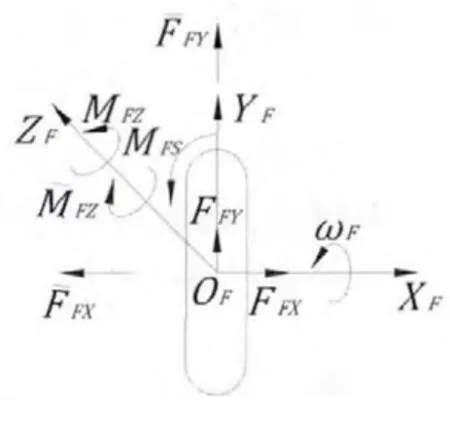
圖4 前輪受力示意圖

由上述式可得:
1.3 車體前輪運(yùn)動(dòng)建模
車體前輪的受力如圖4 所示。 圖中瞬時(shí)慣性坐標(biāo)系OF—XFYFZF 與圖1 中O—XYZ 方向一致。左前輪運(yùn)動(dòng)方程如下:

式中,F(xiàn)FX,F(xiàn)FY—前輪連接點(diǎn)F 沿XF,YF 方向受力;mF—左前輪質(zhì)量;RF—左前輪半徑;MFZ―前輪連接點(diǎn)F處沿YF 軸所受轉(zhuǎn)矩;FFX—地面對前輪側(cè)滑摩擦力;FFY—地面對前輪滾動(dòng)摩擦力;MFZ,MFS—地面對前輪扭轉(zhuǎn)摩擦力矩和滾動(dòng)阻力矩;ωF,ωFZ—左前輪繞XF,ZF 軸角加速度;JFX,JFZ—左前輪繞XF,ZF 軸的轉(zhuǎn)動(dòng)慣量。
為求車體整體動(dòng)力學(xué)模型, 可根據(jù)實(shí)際情況作如下簡化:
1.3.1 車體幾何尺寸左右對稱, 即:RL=RR=R;mL=mR=m。
1.3.2 前輪同車體其他部分相比質(zhì)量和轉(zhuǎn)動(dòng)慣量可忽略,即:mF=0;JFX=JFZ=0。
1.3.3 車體運(yùn)動(dòng)時(shí)車輪不打滑,只作純滾動(dòng),即:

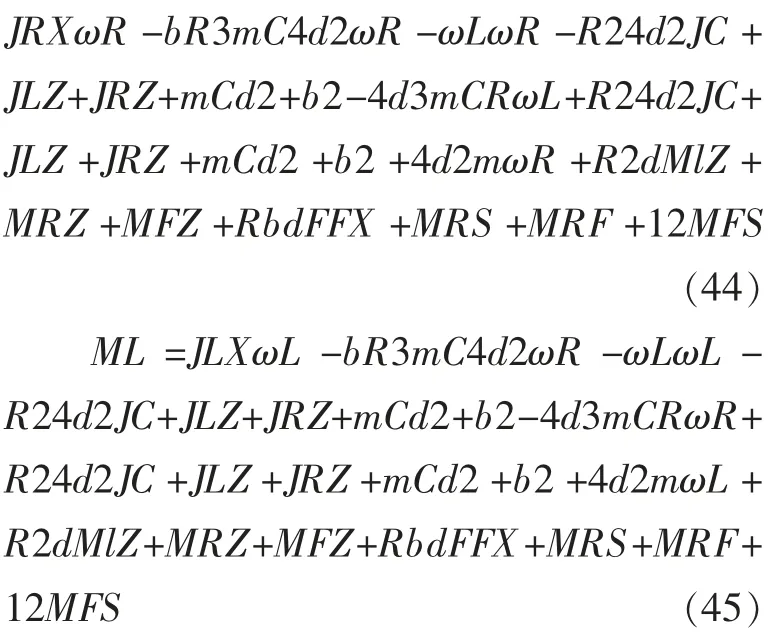
通過上述各式可得MR 和ML:MR=
1.4 車體參數(shù)設(shè)計(jì)
根據(jù)AGV 小車結(jié)構(gòu)尺寸和性能要求,設(shè)計(jì)并計(jì)算參數(shù):左、右后輪到質(zhì)心間距d=0.5m;前、后輪到質(zhì)心間距b=0.6m;車輪半徑R=0.1m;車體質(zhì)量mC=30kg;地面對前輪側(cè)滑摩擦力[4]FFX=fFN=13fmCg=13×0.8×30×10=80N;右后輪受到軸承的摩擦阻力矩[5]MRS=fFN=13fmCg=13×0.002×30×10=0.2Nm; 地面對右后輪的滾動(dòng)阻力矩MRF=Nk=13mCgk=13×30×10×0.01=1Nm; 地面對前輪滾動(dòng)阻力矩MRF=Nk=13mCgk=13×30×10×0.01=1Nm; 地面對左后輪、右后輪和前輪扭轉(zhuǎn)摩擦力矩,MlZ=MRZ=MFZfFN=13fmCg=13×0.002×30×10=0.2Nm。
2 車體動(dòng)力學(xué)方程仿真分析
為了研究后輪驅(qū)動(dòng)電機(jī)傳遞給后輪的轉(zhuǎn)矩與左右后輪轉(zhuǎn)速之間的關(guān)系, 假設(shè)小車平穩(wěn)運(yùn)行時(shí)左右后輪角加速度可忽略,即:ωR=ωL=0。
由式(44),式(45)和車體參數(shù)可得方程:

利用Matlab 軟件編程對式(46),(47)進(jìn)行仿真分析[6],其中設(shè)定ωR 取值范圍為0-10rad/s,ωL 取值范圍為0-10rad/s,結(jié)果如圖5、圖6 所示。
由圖5 可得出MR 與ωR 和ωL 之間的關(guān)系。 當(dāng)ωL偏小,ωR 偏大時(shí),MR 的變化起伏較大。 當(dāng)ωL 偏大,ωR偏小時(shí),MR 的變化趨于平緩。
由圖6 可得出ML 與ωR 和ωL 之間的關(guān)系。 當(dāng)ωL偏大,ωR 偏小時(shí),ML 的變化起伏較大。 當(dāng)ωL 偏小,ωR偏大時(shí),ML 的變化趨于平緩。
由圖5 和圖6 可以看出MR 與ML 和ωR 與ωL 之間的非線性耦合關(guān)系, 并可以通過Matlab 計(jì)算得到ωR 與ωL 在0—10rad/s 轉(zhuǎn)速下所對應(yīng)MR 與ML 值,從而通過控制左右后輪受到的驅(qū)動(dòng)電機(jī)輸出的轉(zhuǎn)矩得到想要的行走路徑。
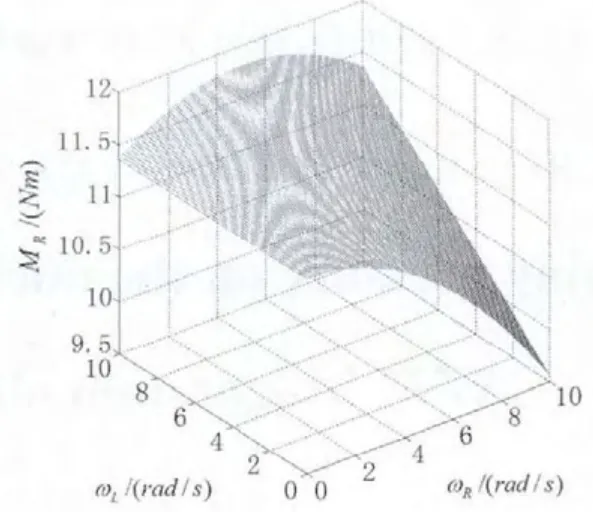
圖5 ωR,ωL 取不同值時(shí)MR計(jì)算結(jié)果示意圖

圖6 ωR,ωL 取不同值時(shí)ML計(jì)算結(jié)果示意圖
3 結(jié)論
AGV 的運(yùn)載車體部分是整個(gè)系統(tǒng)的承載基礎(chǔ), 路徑控制是實(shí)現(xiàn)車體運(yùn)行的重要途徑。 本文對兩后輪獨(dú)立驅(qū)動(dòng)差速轉(zhuǎn)向、前輪為萬向輪的三輪AGV 小車進(jìn)行了動(dòng)力學(xué)分析,考慮到車體質(zhì)量、摩擦阻力的影響,并建立了動(dòng)力學(xué)方程, 從而給出左右驅(qū)動(dòng)輪的驅(qū)動(dòng)轉(zhuǎn)矩和左右輪轉(zhuǎn)動(dòng)速度之間的非線性耦合關(guān)系。 并由此進(jìn)行Matlab 建模仿真分析,從而驗(yàn)證了動(dòng)力學(xué)方程的合理性和有效性,對AGV 小車的驅(qū)動(dòng)電機(jī)選擇和控制起步、直線行駛、轉(zhuǎn)彎行駛和停車等情況的參數(shù)設(shè)計(jì)有一定的理論指導(dǎo)意義。
[1]張正義.AGV 技術(shù)發(fā)展綜述[J].物流技術(shù)與應(yīng)用,2005(7):6-7.
[2]Sudha Arora,A K Raina,A K Mittal.Collision Avoidance among AGVS at Junctions [A]. Proceedings of the IEEE intelligent Vehicles Symposim[C].2000(1):31-33.
[3]王鐸.理論力學(xué)(Ⅰ)[M].6 版.北京:高等教育出版社2002:323-325.
[4]Bowden F P,Tabor D.The friction and lubrication of solids[M].Oxford:Clarendon Press,1954:450.
[5]王文斌.機(jī)械設(shè)計(jì)手冊.第1 卷[M].3 版.北京:機(jī)械工業(yè)出版社,2004:1-24.
[6]薛定宇,陳陽泉.基于MATLAB/Simulink 的系統(tǒng)仿真技術(shù)與應(yīng)用[M].北京:清華大學(xué)出版社,2002.