跨越式高壓輸電線路巡線機器人動力學研究
2015-08-26 06:38:14吳功平
電子設計工程 2015年21期
關鍵詞:機械
王 婷, 吳功平
(武漢大學 湖北 武漢 430072)
巡線機器人主要用于對輸電線路的故障巡檢, 以架空高壓輸電線路地線為行駛路徑,通過機器人所搭載的高清攝像機及手眼攝像機等設備代替人對線路、 桿塔及金具實施檢查。 針對高壓輸電線路的結構特征,本實驗室設計了一種雙臂滾輪跨越式高壓輸電線路巡線機器人,能夠跨越地線上諸如防震錘、懸垂線夾一類的障礙物,自主完成在線巡檢任務。
機器人的在線自主運行主要依靠機器人的實時控制系統, 通過實時控制給定機器人各關節運動相應的力矩或力,從而驅動各關節按照給定的曲線運動, 以完成在線巡檢任務。 為了實時控制的需要,利用動力學模型,進行動力學逆問題的求解具有十分重要的意義。 本文采用D-H 法[1]構建跨越式巡線機器人空間坐標,用Lagrange 方法[2-3]建立機械臂動力學模型, 推導了機器人多剛體動力學方程, 在此基礎上用ADAMS 對一種較復雜工況進行了機械臂各關節動力學仿真,通過給定各關節的位移、速度曲線,通過仿真確定各關節的有效驅動力或驅動力矩,從而為實時控制提供理論依據。
1 巡線機器人的結構分析
架空輸電線路主要由輸電導線及其金具 (包括防震錘、壓接管、懸垂線夾、耐張線夾等)等組成,根據220 kV 及以上線路地線及其橫擔塔頭結構,機器人的行駛路徑主要由直線有障礙段、直線無障礙段和變向行走段3 種不同的路徑段組成,如圖1 所示。

圖1 機器人行駛路徑分類Fig. 1 The classification of robot moving path
根據線路的結構,以及對作業任務的分解、巡線機器人設計成雙機械臂反對稱結構,通過雙臂懸掛在地線上,兩個機械臂的端部帶有滾輪,可使巡線機器人整機沿直線導軌移動;如圖2 所示,雙臂各有一個伸縮關節、一個俯仰關節、一個回轉關節,雙臂共用一個錯臂移動關節;每個臂的末端各有一個行走關節(行走輪)、一個夾緊關節(夾爪)、一個壓緊關節(壓緊輪),為了增強機構的自適應能力,壓緊輪鉸接在壓緊關節上,能夠繞著壓緊關節旋轉,在壓線過程中,自動調節以壓緊導線。
2 巡線機器人動力學模型
2.1 Lagrange 方法的動力學建模

圖2 巡線機器人機構示意圖Fig. 2 Structure diagram of line-inspection robot
機器人動力學建模的方法有很多, 常用的方法有牛頓-歐 拉(Newton-Euler)方 法、拉 格 朗 日(Lagrange)方 法、高 斯(Gauss)方法、凱恩(Kane)方法、旋量對偶數方法等[1-3]。 其中拉格朗日方法是一種基于能量的動力學方法, 不需要求約束反作用力,可避免方程中出現不必要的內力項,推導相對比較簡單。 本文通過該方法來推導巡線機器人系統的動力學模型。
用Lagrange 方法建立系統的動力學方程,首先構建拉格朗日函數,令系統總動能為Ek,系統總勢能為Ep,則拉格朗日函數為:

由于勢能Ep不含q˙i,則系統的動力學方程為:

式中:qi表示關節i 處的廣義坐標; q˙i表示關節i 處的廣義速度;τi表示關節i 處的廣義力。
用D-H 坐標表示機器人的動能與勢能,經推導簡化后的拉格朗日方程可寫成如下的形式:

式中:Ii為偽慣量矩陣;n 為機器人的桿件數;Trace 為方陣的秩;Dii為關節i 的有效慣量;Dij(i≠j)為關節j 對關節i 的耦合慣量;Dijj為關節j 的速度在關節i 處產生的向心力項系數;Dijk為關節j 和關節k 在關節i 處產生的哥氏力項系數;Gi為關節i 處的重力項系數。
2.2 巡線機器人動力學方程的推導
本文所研究的機器人共有7 個關節, 包括3 個移動關節和4 個轉動關節。其中關節0 是基坐標,關節2、4、1、5 是轉動關節,關節3、6 是移動關節(另一臂上與6 相對應的也是移動關節)。關節1、5 的軸線水平,分別與關節3 的軸線垂直,關節2、4 的軸線垂直,同樣與關節3 的軸線垂直。 機器人與障礙物精定位后, 機器人夾爪及一個移動關節分別采取夾緊和壓緊的方式將機器人與地線固連。 由此機器人還余下6 個活動關節, 將這6 個活動關節用D-H 法建立連桿坐標系如圖3 所示。 在該坐標系中,將{0}基坐標系視作抽象的零剛體,并認為該機器人系統以抽象的O1({0}基坐標系的原點)與零剛體相聯 系[4-7]。

圖3 機械臂連桿坐標系Fig. 3 Coordinate system of mechanical armlinkage
每一個連桿及相鄰桿間的關系用4 個參數表示: 相鄰兩連桿距離di,連桿長度為ai,連桿扭角為αi,兩連桿夾角為θi[3]。相應的連桿參數列于表1 機械臂連桿參數中。

表1 機械臂連桿參數Tab. 1 Parameter of mechanical armlinkage
連桿變換公式為(其中cθ 代表cosθ,sθ 代表sinθ):

利用公式(8)及表1 所列的連桿參數可以算出各個連桿變換矩陣,將各個連桿變換矩陣相乘,即得到機器人的“越障臂變換矩陣,
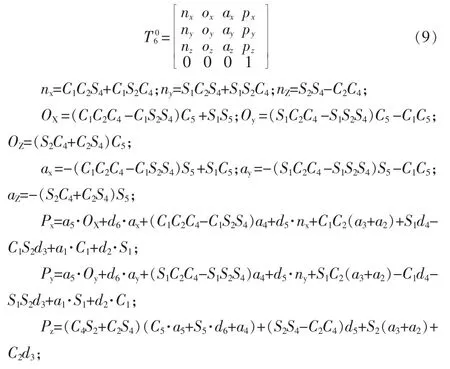
方程式(9)表示機器人的末端連桿坐標系{6}相對于基坐標系{0}的位姿。 為校核所得結果準確性,計算當θ0=0°,θ2=90°,d3=664,θ4=90°,θ5=90°,d6=750 時,手臂變換矩陣的值,利用MATLAB 計算結果為:

與圖3 所示的情況完全相符。
由式(7)可得各連桿的偽慣量矩陣,將式(10)和偽慣量矩陣代入式(4)、(5)、(6),得Dii,Dijj,Dij,Dijk,將Dii,Dijj,Dij,Dijk代入式(3),即可得到巡線機器人的完整動力學方程。
3 機械臂動力學數值仿真及動態響應計算
3.1 機械臂動力學數值仿真
機械人的爬行工況有多種,其中有無障直線線段的滾動/壓緊輪加壓滾動爬坡、無障礙大坡度直線段的攀爬、錯臂跨越雙懸垂線夾、越過耐張桿塔等多種工況,本文選取工況錯臂跨越雙懸垂線夾,其運動規劃圖4 所示。 當機器人檢測到前進方向上有懸垂線夾時, 會在距離懸垂線夾一定距離的地方停止,并且偶臂夾緊,奇臂伸長并轉開使行走輪脫離導線如圖(a)所示;移動機構運動使兩臂交錯,通過俯仰機構擺開奇臂如圖(b)所示;奇臂縮短到一定距離找線落線如圖(c)所示;偶臂俯仰機構擺開并伸長,機器人向前移動,使奇臂有擺回空間后,奇臂擺回夾緊如圖(d)所示;偶臂伸長后擺回,回轉錯臂,回轉找線落線,完成跨越雙懸垂線夾,如圖(e)、(f)所示。

圖4 機器人跨越雙懸垂線夾圖Fig. 4 Diagram of crossing double hanging clip
其中,奇臂為圖3 中{0}基坐標系所在臂,偶臂為{6}坐標系所在臂。 由于兩個臂為反對稱布局,故只需研究一個臂的力或力矩隨時間的變化情況。 通過ADAMS 仿真平臺對機械臂各關節進行動力學仿真,在仿真以前,已經根據操作臂的運動學方程確定機器人越障各個關節所需的位移或速度,通過對機械臂各關節加載位移、速度曲線,如圖5 所示,機械臂各關節的運動規律均通過STEP 函數獲得, 在仿真過程中沒有考慮摩擦力。

圖5 各關節位移、角速度曲線圖Fig. 5 Displacement or angular velocity curve diagram of each joint
3.2 動態響應計算
對跨越雙懸垂線夾工況下,跨越式巡線機器人機械臂進行動力學逆問題仿真計算,得到機器人機械臂各運動關節的驅動力或驅動力矩,如圖6 所示。
由圖6 可以看出各關節的驅動力及力矩變化趨勢,以及所需的最大驅動力或力矩,可以以此為依據確定所需電機型號以及控制方案的選擇。
4 結 論

圖6 關節驅動力/力矩圖Fig. 6 Joint driving force or torque diagram
用D-H 法構建跨越式巡線機器人空間坐標構,并以此坐標為基礎,采用Lagrange 方法建立了機器人的動力學模型,得到了機器人各關節轉角和連桿結構參數表示的動力學方程,并對機器人跨越雙懸垂線夾此爬行工況進行了動態數值仿真及動態響應計算。 計算結果表明該跨越式巡線機器人系統的動力學模型是有效的。 同時給機械臂的驅動系統的設計提供了理論依據與參考,可用于該跨越式巡線機器人的控制。
[1] 蔡自興. 機器人學[M]. 北京: 清華大學出版社,2000.
[2] 熊友倫. 機器人技術基礎[M]. 湖北:華中科技大學出版社,1996.
[3] 美克萊格. 機器人學導論[M]. 北京:機械工業出版社,2006.
[4] Huston R L,劉又午. 多體系統動力學[M]. 天津:天津大學出版社,1991.
[5] 韓清凱,羅忠. 機械系統多體動力學分析、控制與仿真[M].北京:科學出版社,2010.
[6] 肖曉輝,史鐵林,杜娥. 高壓輸電線路巡線作業機器人的動力學建模[J]. 機械與電子,2004(10):45-47.
XIAO Xiao-hui,SHI Tie-lin,DU E. Dynamic modeling of overhanging transmission-line inspection robot[J]. Machinery& Electronics,2004(10):45-47.
[7] Huston R L,PasserelloCE. Multi body structural dynamics including translation between the bodies[J]. Computers and Structure,1980(11):713-720.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09