水下目標(biāo)回波幾何結(jié)構(gòu)的時(shí)頻域盲源分離
2015-08-30 09:23:04孫世鈞李秀坤孟祥夏
哈爾濱工程大學(xué)學(xué)報(bào) 2015年8期
關(guān)鍵詞:信號(hào)
孫世鈞,李秀坤,孟祥夏
(哈爾濱工程大學(xué)水聲技術(shù)國家級(jí)重點(diǎn)實(shí)驗(yàn)室,黑龍江哈爾濱150001)
主動(dòng)聲吶對(duì)水下目標(biāo)進(jìn)行探測(cè)時(shí),目標(biāo)的聲散射信號(hào)回波中攜帶著目標(biāo)的重要信息,如目標(biāo)的幾何形狀、尺度和材質(zhì)信息等,這些信息是對(duì)目標(biāo)進(jìn)行識(shí)別和作進(jìn)一步分析的基礎(chǔ)。湯渭霖[1]于1994年提出了聲吶目標(biāo)回波亮點(diǎn)模型,將水下目標(biāo)回波分解為多個(gè)亮點(diǎn)的線性疊加。1998-2000年,Azimi-Sadjadi[2-3]等人采用小波變換對(duì)水下沉底目標(biāo)進(jìn)行了分類與識(shí)別。2000年以來,李秀坤[4-6]等人運(yùn)用多種方法對(duì)水下目標(biāo)的亮點(diǎn)結(jié)構(gòu)進(jìn)行了特征提取,文獻(xiàn)[7-8]運(yùn)用盲源分離的方法將混響與目標(biāo)回波進(jìn)行分離。然而,在國內(nèi)外研究成果中,很少對(duì)于回波信號(hào)亮點(diǎn)之間的分離方法進(jìn)行論述。
盲源分離(blind sources separation,BSS)是20世紀(jì)80年代中后期迅速發(fā)展起來的一種信號(hào)處理方法。它可以在源信號(hào)及傳輸通道特性事先未知的條件下從若干觀測(cè)到的混合信號(hào)中提取、分離出無法直接觀測(cè)的各個(gè)原始信號(hào),只要源信號(hào)之間滿足相互獨(dú)立或不相關(guān)的條件。由于盲源分離算法的不確定性[9],將導(dǎo)致分離信號(hào)的幅度和排列順序與源信號(hào)不同,但這種不確定性不會(huì)影響對(duì)信號(hào)的分析。對(duì)于非平穩(wěn)源信號(hào)的分離問題,常采用時(shí)頻域盲源分離方法[10]。本文利用回波信號(hào)中的各個(gè)亮點(diǎn)結(jié)構(gòu)在時(shí)頻域上具有不同分布的特點(diǎn),采用時(shí)頻域盲源分離方法對(duì)回波信號(hào)進(jìn)行分離,可以很好地將各個(gè)亮點(diǎn)分離開。
1 目標(biāo)回波的亮點(diǎn)模型
理論分析和實(shí)驗(yàn)都證明,在高頻情況下,任何一個(gè)復(fù)雜目標(biāo)的回波都是由若干個(gè)子回波疊加而成的,每個(gè)子回波可以看成是從某個(gè)散射點(diǎn)發(fā)出的波,這個(gè)散射點(diǎn)被稱為亮點(diǎn)。根據(jù)亮點(diǎn)的產(chǎn)生機(jī)理的不同,可以分為幾何亮點(diǎn)和彈性亮點(diǎn)2大類:1)幾何亮點(diǎn):由目標(biāo)幾何形狀決定的回波稱為幾何反射波,相應(yīng)的回波稱為幾何類亮點(diǎn)。這類亮點(diǎn)的聲中心就是幾何上的凸點(diǎn)、棱角等。2)彈性亮點(diǎn):當(dāng)入射聲波與目標(biāo)的本征頻率相吻合時(shí),目標(biāo)將產(chǎn)生共振振動(dòng)向周圍介質(zhì)輻射聲波,稱之為彈性再輻射回波或彈性類亮點(diǎn)。這些波的傳播速度、衰減及再輻射效率與材料參數(shù)及物體形狀有關(guān),由文獻(xiàn)[1]可知,這類亮點(diǎn)的聲中心并不對(duì)應(yīng)真實(shí)的幾何亮點(diǎn),而是根據(jù)波傳播的聲程確定的等效亮點(diǎn)。
當(dāng)回波信號(hào)中存在N個(gè)亮點(diǎn)時(shí)的系統(tǒng)函數(shù)為

式中:A(r,ω)是幅度因子,τ是時(shí)間延遲因子,φ是相位跳變因子。
2 基于亮點(diǎn)模型的時(shí)頻域盲源分離方法
假設(shè)發(fā)射信號(hào)為線性調(diào)頻信號(hào),回波信號(hào)中包含n個(gè)幾何亮點(diǎn)結(jié)構(gòu)。若將這n個(gè)幾何亮點(diǎn)視為源信號(hào),則

式中:f0是線性調(diào)頻信號(hào)的初始頻率,k是線性調(diào)頻信號(hào)的調(diào)頻斜率,An、τn、φn分別為源信號(hào)的幅度、相對(duì)于發(fā)射信號(hào)的時(shí)間延遲和相位變化。由線性調(diào)頻信號(hào)可知,n個(gè)亮點(diǎn)在時(shí)頻二維平面上可以由n條相互平行的斜線來表示。
n個(gè)源信號(hào)通過混合矩陣H混合后得到n個(gè)觀測(cè)信號(hào)(假定觀測(cè)信號(hào)與源信號(hào)的數(shù)目相同)x(t),則對(duì)x(t)進(jìn)行時(shí)頻域盲源分離的算法如下:
1)對(duì)觀測(cè)信號(hào)x(t)進(jìn)行白化處理,得到白化矩陣W,進(jìn)而得到白化信號(hào):

2)對(duì)白化信號(hào)z(t)進(jìn)行WVD時(shí)頻變換,得到白化信號(hào)的WVD時(shí)頻分布矩陣:

其中,U代表酉矩陣,Ds為源信號(hào)的WVD時(shí)頻分布矩陣,即
式中:

當(dāng)i=j時(shí),dij表示第i個(gè)源信號(hào)的WVD分布,稱為信號(hào)的自項(xiàng);當(dāng)i≠j時(shí),dij表示第i個(gè)源信號(hào)和第j個(gè)源信號(hào)的互WVD分布,稱為信號(hào)的互項(xiàng)。若Ds為一對(duì)角陣,則可以得到

式(7)說明:白化信號(hào)時(shí)頻分布函數(shù)矩陣可以被一個(gè)酉矩陣變換為對(duì)角陣,只要找到一個(gè)酉陣使分布函數(shù)矩陣Dz(t,f)對(duì)角化就實(shí)現(xiàn)了混合矩陣的盲辨識(shí)。
3)正確地選擇時(shí)頻點(diǎn)。因?yàn)樵谀承r(shí)頻點(diǎn)上Ds主對(duì)角線的元素值不大于其他位置元素的值,就不能認(rèn)為Ds近似為對(duì)角陣。例如由于WVD分布會(huì)引起交叉項(xiàng),對(duì)于交叉項(xiàng)能量集中的時(shí)頻點(diǎn),分布矩陣互項(xiàng)的元素值遠(yuǎn)大于在該時(shí)頻點(diǎn)上自項(xiàng)的元素值。所以正確地選擇時(shí)頻點(diǎn)對(duì)恢復(fù)源信號(hào)起到了關(guān)鍵性作用。時(shí)頻點(diǎn)的選擇方法如下:
首先,對(duì)于時(shí)頻面上每一個(gè)(t,f)點(diǎn)對(duì)應(yīng)的矩陣Dz(t,f)求跡,得到

通過上述選擇時(shí)頻點(diǎn)的方法,可以將亮點(diǎn)結(jié)構(gòu)所在的時(shí)頻點(diǎn)選出,而將其相互交叉項(xiàng)的時(shí)頻分布點(diǎn)去除。
4)采用以下時(shí)頻對(duì)角化對(duì)照函數(shù),運(yùn)用聯(lián)合對(duì)角化的方法求出酉矩陣。

其中,off()為非對(duì)角線元素的平方和。
5)通過式(10)求得各個(gè)亮點(diǎn)源信號(hào)的時(shí)域信號(hào)。

3 仿真分析
為了驗(yàn)證本文所述方法的有效性,下面對(duì)含有2個(gè)幾何亮點(diǎn)的信號(hào)進(jìn)行時(shí)頻域盲源分離仿真研究(對(duì)采樣頻率進(jìn)行歸一化處理)。
仿真1 假設(shè)主動(dòng)聲吶發(fā)射信號(hào)為線性調(diào)頻脈沖信號(hào),脈沖持續(xù)時(shí)間為1 000 s。回波信號(hào)中包含2個(gè)幾何亮點(diǎn)。模擬亮點(diǎn)源信號(hào)為2個(gè)線性調(diào)頻脈沖信號(hào),起始頻率和截至頻率分別為f1=0.04 Hz,f2=0.09 Hz,幅度分別為 1、0.2,2 個(gè)幾何亮點(diǎn)的時(shí)間延遲分別為200、400 s,信號(hào)的采樣頻率fs=1 Hz。假定源信號(hào)通過隨機(jī)混合矩陣A=rand(2,2)進(jìn)行混合,各傳感器得到的觀測(cè)信號(hào)及其Wigner-Ville時(shí)頻分布如圖1所示。運(yùn)用時(shí)頻域盲源分離方法對(duì)觀測(cè)到的混合信號(hào)進(jìn)行分離,得到的分離信號(hào)及其與發(fā)射信號(hào)的匹配濾波如圖2所示。
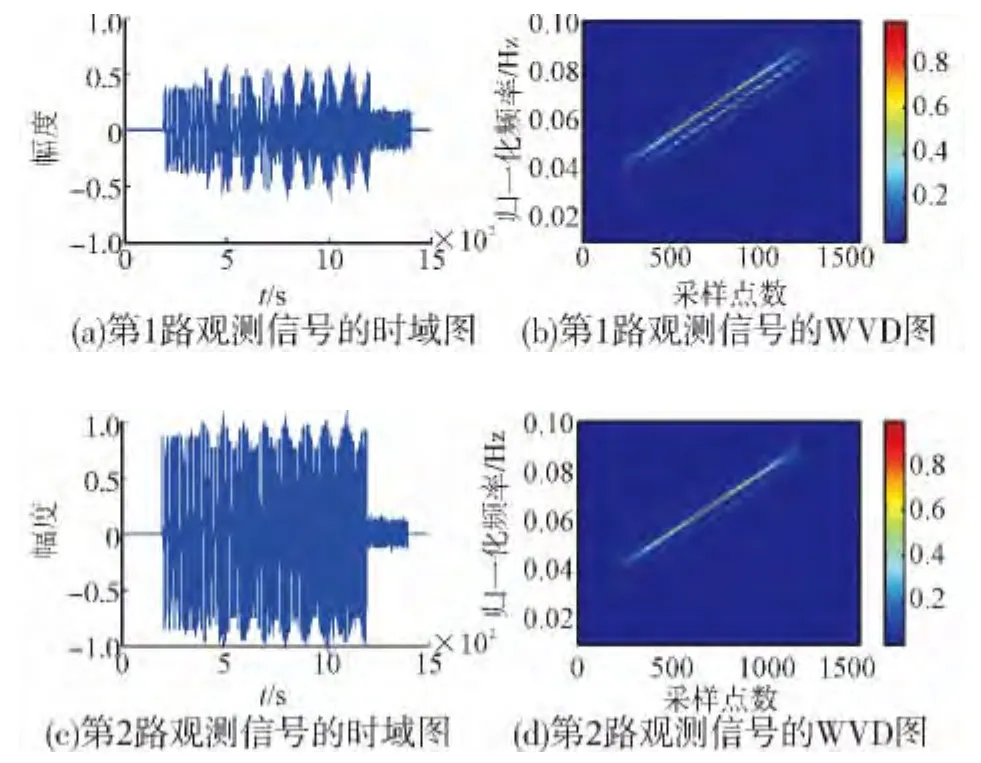
圖1 各路觀測(cè)信號(hào)的時(shí)域圖及其時(shí)頻分布Fig.1 The observed signals in time domain and time-frequency domain
從圖1、2中可見,觀測(cè)信號(hào)是2個(gè)亮點(diǎn)源信號(hào)在時(shí)域上的混合信號(hào),由于2個(gè)亮點(diǎn)的幅度相差較大,在觀測(cè)信號(hào)的時(shí)頻分布圖上僅能觀測(cè)到第1個(gè)亮點(diǎn)信號(hào)及其與第2個(gè)亮點(diǎn)信號(hào)的交叉項(xiàng),第2個(gè)亮點(diǎn)信號(hào)的時(shí)頻特性被淹沒。經(jīng)過時(shí)頻域盲源分離算法處理后,2個(gè)幾何亮點(diǎn)在時(shí)域上可以被分離。
仿真2 假設(shè)主動(dòng)聲吶發(fā)射信號(hào)為線性調(diào)頻脈沖信號(hào),脈沖持續(xù)時(shí)間為1 000 s。回波信號(hào)中包含2個(gè)幾何亮點(diǎn)。模擬亮點(diǎn)源信號(hào)為2個(gè)線性調(diào)頻脈沖信號(hào),起始頻率和截至頻率分別f1=0.04 Hz,f2=0.09 Hz,幅度均為1,2個(gè)幾何亮點(diǎn)的時(shí)間延遲分別為200、250 s,即亮點(diǎn)間的時(shí)間延遲為τ=50 s,信號(hào)的采樣頻率fs=1 Hz,假定源信號(hào)通過隨機(jī)混合矩陣A=rand(2,2)進(jìn)行混合,各傳感器得到的觀測(cè)信號(hào)及其Wigner-Ville時(shí)頻分布如圖3所示。運(yùn)用時(shí)頻域盲源分離方法對(duì)觀測(cè)到的混合信號(hào)進(jìn)行分離,得到的分離信號(hào)及其與發(fā)射信號(hào)的匹配濾波如圖4所示。改變第2個(gè)幾何亮點(diǎn)的時(shí)間延遲為230 s,各傳感器得到的觀測(cè)信號(hào)及其Wigner-Ville時(shí)頻分布如圖5所示,得到的分離信號(hào)及其與發(fā)射信號(hào)的匹配濾波如圖6所示。
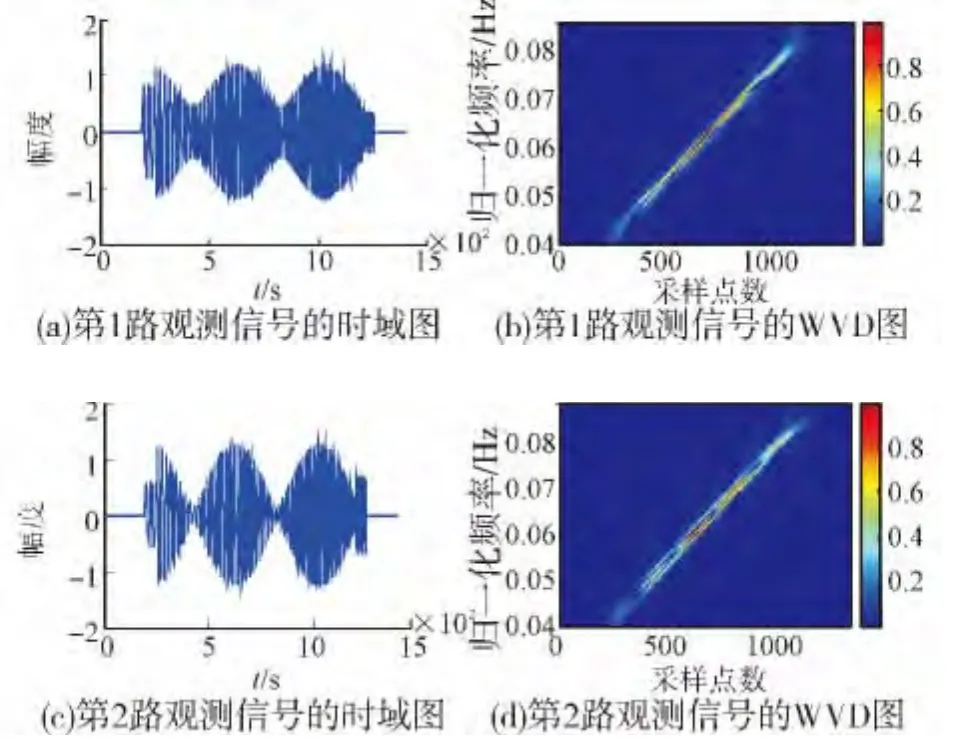
圖3 τ=50 s時(shí)觀測(cè)信號(hào)的時(shí)域圖及其時(shí)頻分布Fig.3 The observed signals in time domain and time-frequency domain when τ=50 s
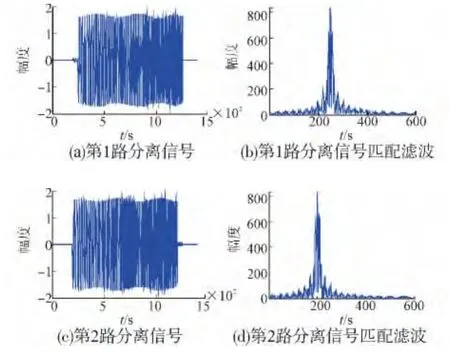
圖4 τ=50 s時(shí)分離信號(hào)的時(shí)域圖及其匹配濾波Fig.4 The separated signals in time domain and its matched filtering when τ=50 s
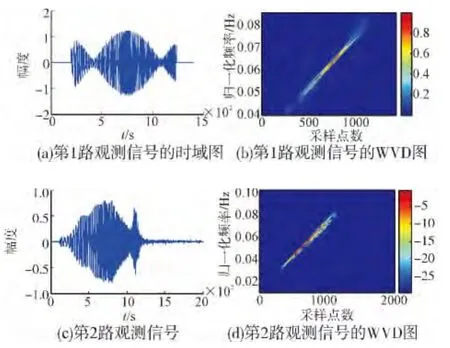
圖5 τ=30 s時(shí)觀測(cè)信號(hào)的時(shí)域圖及其時(shí)頻分布Fig.5 The observed signals in time domain and time-frequency domain when τ=30 s

圖6 τ=30 s時(shí)分離信號(hào)的時(shí)域圖及其匹配濾波Fig.6 The separated signals in time domain and its matched filtering when τ=30 s
由圖3~6可見,當(dāng)2個(gè)幾何亮點(diǎn)之間的時(shí)間延遲較小時(shí),由于Wigner-Ville分布時(shí)頻分辨率的限制,不能在時(shí)頻圖上將2個(gè)亮點(diǎn)區(qū)分開。當(dāng)時(shí)間延遲為50 s時(shí),通過時(shí)頻域盲源分離算法可以將2個(gè)亮點(diǎn)分離開。當(dāng)2個(gè)幾何亮點(diǎn)之間的時(shí)間延遲減小為30 s時(shí)則不能通過該算法將2個(gè)亮點(diǎn)在時(shí)域上進(jìn)行分離。2個(gè)幾何亮點(diǎn)之間不同時(shí)間延遲下的相關(guān)系數(shù)如圖7所示。
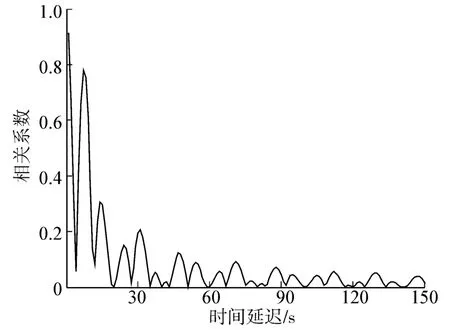
圖7 2個(gè)亮點(diǎn)不同時(shí)延下的相關(guān)系數(shù)Fig.7 Correlation coefficient of highlights with different time delays
由圖7可見,隨著2個(gè)亮點(diǎn)之間時(shí)間延遲的增大,其相關(guān)系數(shù)逐漸減小。當(dāng)相關(guān)系數(shù)小于0.2時(shí),2個(gè)亮點(diǎn)可以通過時(shí)頻域盲源分離方法在時(shí)域上分離開來,當(dāng)相關(guān)系數(shù)大于0.2時(shí)則不能分離。
4 實(shí)驗(yàn)數(shù)據(jù)處理分析
實(shí)驗(yàn)環(huán)境:實(shí)驗(yàn)在某消聲水池中進(jìn)行,將圓柱形目標(biāo)用吊繩懸浮在水池中,如圖8所示,用發(fā)射換能器發(fā)射線性調(diào)頻脈沖信號(hào),發(fā)射信號(hào)歸一化頻率范圍為0.02~0.08 Hz,脈沖寬度為 1 000 個(gè)采樣點(diǎn)。采用2陣元組成的線陣進(jìn)行信號(hào)接收。轉(zhuǎn)動(dòng)目標(biāo),得到不同掠射角下接收到的觀測(cè)信號(hào),并采用本文所述方法對(duì)觀測(cè)信號(hào)進(jìn)行分離。
當(dāng)掠射角分別為 0°、90°、180°時(shí),得到的觀測(cè)信號(hào)及其時(shí)頻分布圖、分離信號(hào)及其時(shí)頻分布圖如圖9~14所示。從圖9~14可見,當(dāng)掠射角為90°、180°時(shí),可以通過時(shí)頻域盲源分離方法將混合信號(hào)中的2個(gè)亮點(diǎn)進(jìn)行分離。當(dāng)掠射角為0°時(shí),從水聽器接收到混合的觀測(cè)信號(hào)的時(shí)頻分布圖上僅能觀測(cè)到一個(gè)亮點(diǎn),經(jīng)過時(shí)頻域盲源分離后,雖然不能夠在時(shí)域上將2個(gè)亮點(diǎn)進(jìn)行分離,但是可以從分離后一路信號(hào)的時(shí)頻分布上觀測(cè)到第2個(gè)亮點(diǎn),說明在這路分離信號(hào)中第2個(gè)亮點(diǎn)的相對(duì)能量被增強(qiáng)了。
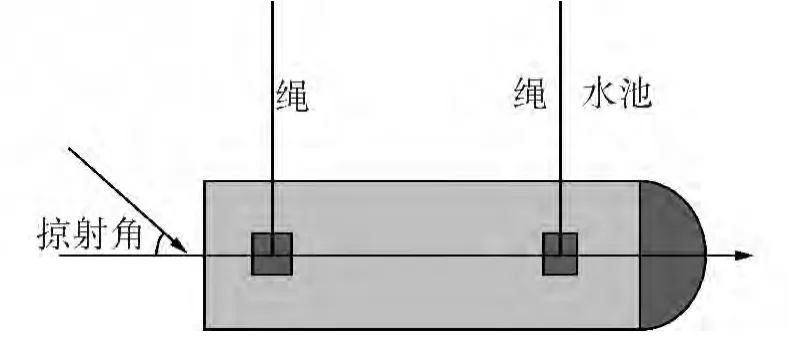
圖8 目標(biāo)模型圖Fig.8 Target model
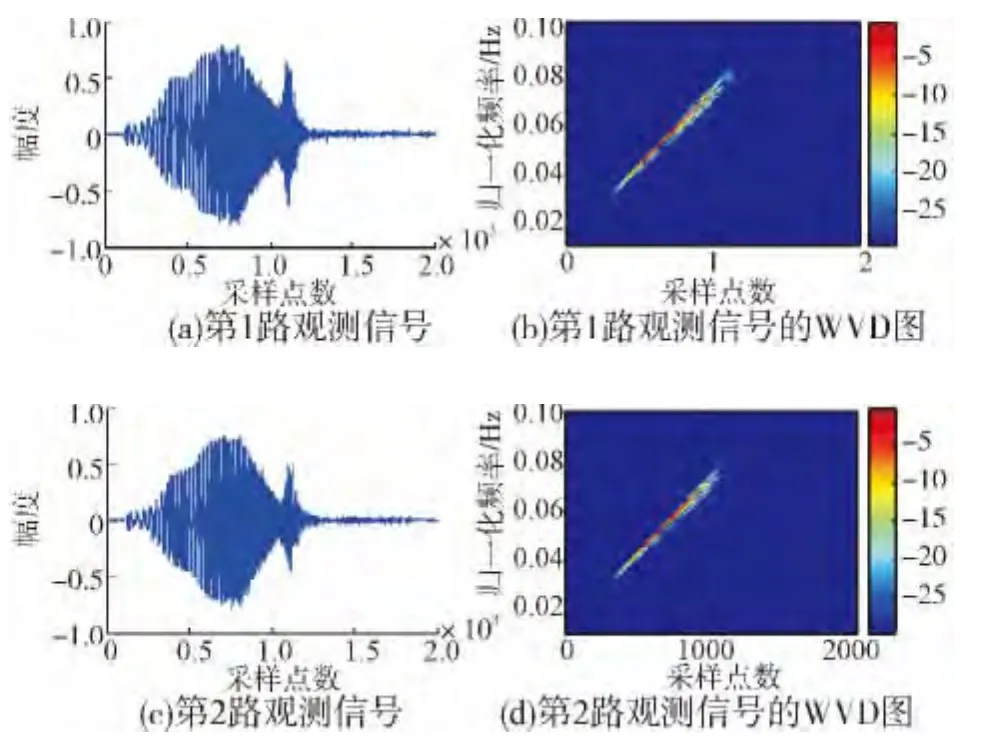
圖9 掠射角為0°時(shí)觀測(cè)信號(hào)及其時(shí)頻分布Fig.9 The observed signals in time domain and time-frequency domain with grazing angle 0°
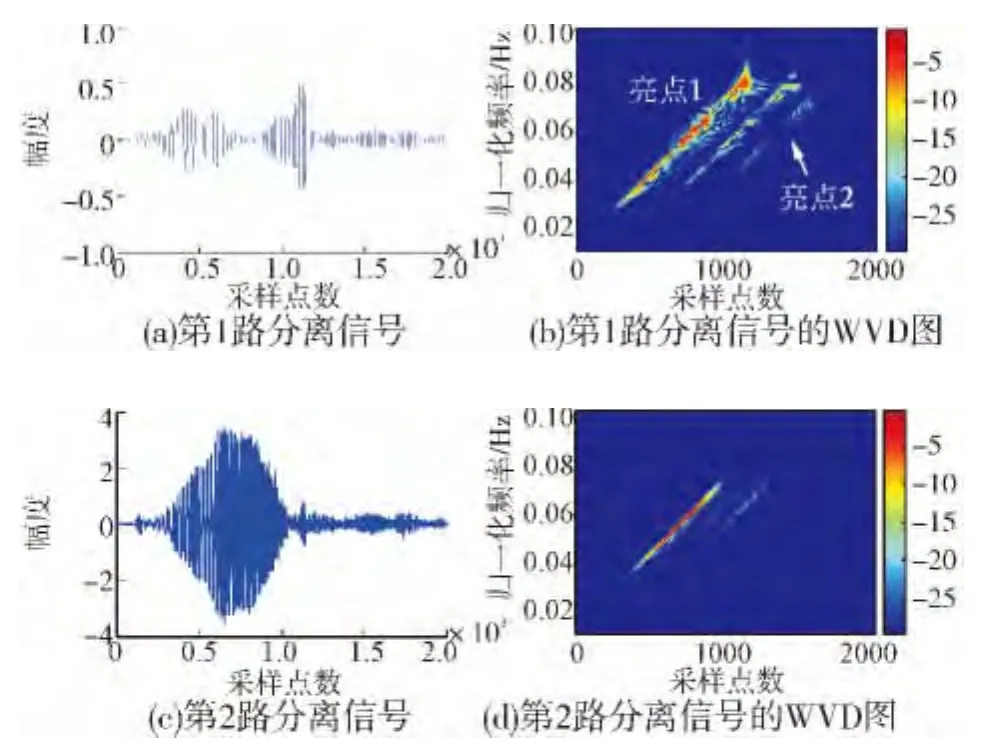
圖10 掠射角為0°時(shí)分離信號(hào)及其時(shí)頻分布Fig.10 The separated signals in time domain and time-frequency domain with grazing angle 0°
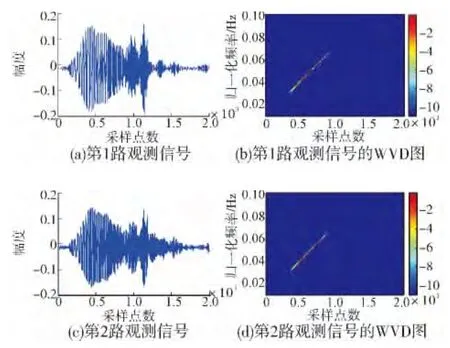
圖11 掠射角為90°時(shí)觀測(cè)信號(hào)及其時(shí)頻分布Fig.11 The observed signals in time domain and time-frequency domain with grazing angle 90°

圖12 掠射角為90°時(shí)分離信號(hào)及其時(shí)頻分布Fig.12 The separated signals in time domain and time-frequency domain with grazing angle 90°
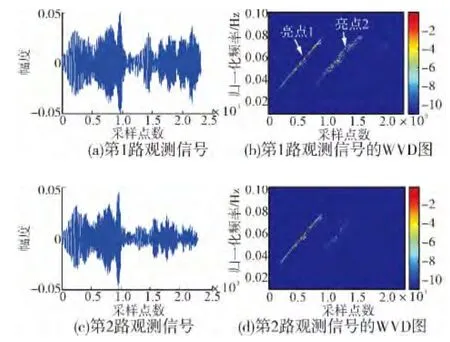
圖13 掠射角為180°時(shí)觀測(cè)信號(hào)及其時(shí)頻分布Fig.13 The observed signals in time domain and time-frequency domain with grazing angle 180°
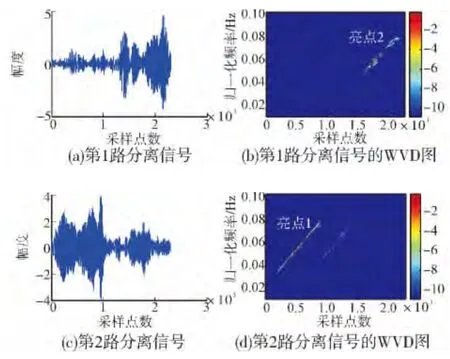
圖14 掠射角為180°時(shí)分離信號(hào)及其時(shí)頻分布Fig.14 The separated signals in time domain and time-frequency domain with grazing angle 180°
5 結(jié)論
本文采用一種基于時(shí)頻域盲源分離的方法對(duì)主動(dòng)聲吶回波信號(hào)中的亮點(diǎn)結(jié)構(gòu)進(jìn)行分離,通過理論推導(dǎo)、仿真分析及實(shí)驗(yàn)數(shù)據(jù)的處理,得到如下結(jié)論:
1)基于水下目標(biāo)的亮點(diǎn)模型,將每個(gè)亮點(diǎn)視為源信號(hào)的一個(gè)向量,然后采用時(shí)頻域盲源分離算法進(jìn)行分離,通過合理地選擇時(shí)頻點(diǎn),抑制了源信號(hào)的交叉項(xiàng),使信號(hào)的能量集中在其時(shí)頻分布矩陣的主對(duì)角線上。
2)在仿真分析中改變2個(gè)亮點(diǎn)間的時(shí)間延遲,當(dāng)2個(gè)亮點(diǎn)之間的相關(guān)系數(shù)小于0.2時(shí),可以通過時(shí)頻域盲源分離方法將其進(jìn)行分離,大于0.2時(shí)則不能分離。
3)在仿真分析中改變2個(gè)亮點(diǎn)間的相對(duì)幅度,當(dāng)2個(gè)亮點(diǎn)之間的的相對(duì)幅度差別較大時(shí),幅度較小的亮點(diǎn)在觀測(cè)信號(hào)的時(shí)頻分布圖中被淹沒,這時(shí)可以通過時(shí)頻域盲源分離方法將其進(jìn)行分離。
4)通過水池實(shí)驗(yàn),驗(yàn)證了該方法分離水下目標(biāo)回波亮點(diǎn)結(jié)構(gòu)的可行性。當(dāng)掠射角為90°、180°時(shí),可以將回波中的2個(gè)亮點(diǎn)分離開;當(dāng)掠射角為0°時(shí),提取到了被淹沒在混合信號(hào)中的第2個(gè)亮點(diǎn)的時(shí)頻特征。
[1]湯渭霖.聲吶目標(biāo)回波的亮點(diǎn)模型[J].聲學(xué)學(xué)報(bào),1994,19(2):92-100.TANG Weilin.Highlight model of echoes from sonar targets[J].Acta Acustica,1994,19(2):92-100.
[2]AZIMI-SADJADI M R,CHARLESTON S,WILBUR J,et al.A new time delay estimation in subbands for resolving multiple specular reflections[J].IEEE Transactions on Signal Processing,1998,46(12):3398-3403.
[3]AZIMI-SADJADI M R,YAO De,HUANG Qiang,et al.Underwater target classification using wavelet packets and neural networks[J].IEEE Transactions on Neural Networks,2000,11(3):784-794.
[4]李秀坤.水雷目標(biāo)特征提取與識(shí)別研究[D].哈爾濱:哈爾濱工程大學(xué),2000:1-120.LI Xiukun.Research on extracting and recognizing of mine character[D].Harbin:Harbin Engineering University,2000:1-120.
[5]李秀坤,李婷婷,夏峙.水下目標(biāo)特性特征提取及其融合[J].哈爾濱工程大學(xué)學(xué)報(bào),2010,31(7):903-908.LI Xiukun,LI Tingting,XIA Zhi.Feature extraction and fusion based on the characteristics of underwater targets[J].Journal of Harbin Engineering University,2010,31(7):903-908.
[6]LI Tingting,LI Xiukun,XIA Zhi.Classification of underwater mines by means of the FRFT and SVM[C]//Proceedings of the 2010 IEEE International Conference on Information and Automation.Harbin,China,2010:1824-1829.
[7]LI Xiukun,WANG Qiyong.Blind separability of reverberation and target echo based on spatial correlation[C]//4th International Conference on Measuring Technology and Mechatronics Automation.Sanya,China,2012:538-543.
[8]李雯雯.混響背景下盲分離方法的研究[D].哈爾濱:哈爾濱工程大學(xué),2013:1-59.LI Wenwen.Research on blind source separation in reverberation background[D].Harbin:Harbin Engineering University,2013:1-59.
[9]馬建倉,牛奕龍,陳海洋.盲信號(hào)處理[M].北京:國防工業(yè)出版社,2006:23-24.
[10]BELOUCHRANI A,AMIN M G.Blind source separation based on time-frequency signal representations[J].IEEE Transactions on Signal Processing,1998,46(11):2888-2897.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
