履帶機(jī)器人通用地面力學(xué)模型分析與底盤設(shè)計
2015-08-30 09:23:24李雨潭朱華高志軍程新景
哈爾濱工程大學(xué)學(xué)報 2015年8期
李雨潭,朱華,高志軍,程新景
(中國礦業(yè)大學(xué)機(jī)電工程學(xué)院,江蘇徐州221116)
移動機(jī)器人越來越多的被應(yīng)用在災(zāi)難救援、環(huán)境探測、反恐排爆等非結(jié)構(gòu)化地形中,其能否代替人很好地執(zhí)行任務(wù)取決于機(jī)器人是否能夠順利的進(jìn)入事故現(xiàn)場。因此,機(jī)器人行走機(jī)構(gòu)的設(shè)計在機(jī)器人的整體設(shè)計中具有十分重要的地位。對于三大行走機(jī)構(gòu),履帶式行走機(jī)構(gòu)具有結(jié)構(gòu)簡單、地面適應(yīng)性強(qiáng)、控制容易等優(yōu)點(diǎn)[1-2]。大多數(shù)移動機(jī)器人均采用履帶式行走機(jī)構(gòu)。但是,往往人們設(shè)計履帶式行走機(jī)構(gòu)時主要是側(cè)重在其結(jié)構(gòu)設(shè)計上,關(guān)注其結(jié)構(gòu)的強(qiáng)度、剛度能不能滿足設(shè)計需求[3-4],很少注重履帶地面力學(xué)性能的研究。而履帶地面力學(xué)性能往往影響著機(jī)器人的能量消耗、運(yùn)動靈活度甚至是否能夠順利行走[5]。通常,履帶的接地長度、寬度與兩側(cè)履帶中心距是構(gòu)成履帶地面力學(xué)的主要參數(shù)。并且可以知道,在履帶接地長度一定的情況下,存在一個最佳的履帶寬度使轉(zhuǎn)向阻力最小[6],履帶接地長度與履帶軌距之間的比值影響轉(zhuǎn)彎的靈活性[7]。因此,履帶地面力學(xué)對于履帶行走機(jī)構(gòu)的設(shè)計具有重要意義。履帶在硬路面上行走轉(zhuǎn)向主要克服履帶與地面間的摩擦力,在軟路面上行走轉(zhuǎn)向除了摩擦力還要克服履帶的側(cè)向推土阻力。目前,對于履帶行走轉(zhuǎn)向的力學(xué)模型分析并不全面,只分析了硬路面工況下履帶與地面間的摩擦力的求解[5],或只考慮了軟路面工況下推土阻力的求解[8],并沒有一個通用的數(shù)學(xué)模型。
本文旨在嘗試建立一個通用的履帶地面力學(xué)模型,并將此模型應(yīng)用到所研制的履帶式煤礦救援機(jī)器人的設(shè)計上,并根據(jù)設(shè)計的煤礦救援機(jī)器人驗(yàn)證理論結(jié)果。
1 物理模型的提出
對于在復(fù)雜路面上行走的履帶機(jī)器人,在直行過程中,機(jī)器人驅(qū)動輪與履帶之間相互作用力只需要克服履帶與地面間的摩擦力,履帶與地面之間并無相對運(yùn)動。而在履帶轉(zhuǎn)彎過程中,履帶必須與地面產(chǎn)生相對滑動,因此履帶地面力學(xué)主要是針對機(jī)器人轉(zhuǎn)彎過程提出的。將履帶所能接觸的地面分為硬質(zhì)地面和軟地面,對于在軟地面行駛,履帶受力情況相對復(fù)雜更能符合履帶機(jī)器人的實(shí)際工況。履帶在軟路面轉(zhuǎn)彎過程中,主要克服其與地面間的摩擦力與推土阻力。
對于履帶機(jī)器人轉(zhuǎn)彎,可以抽象為如圖1所示的物理模型。
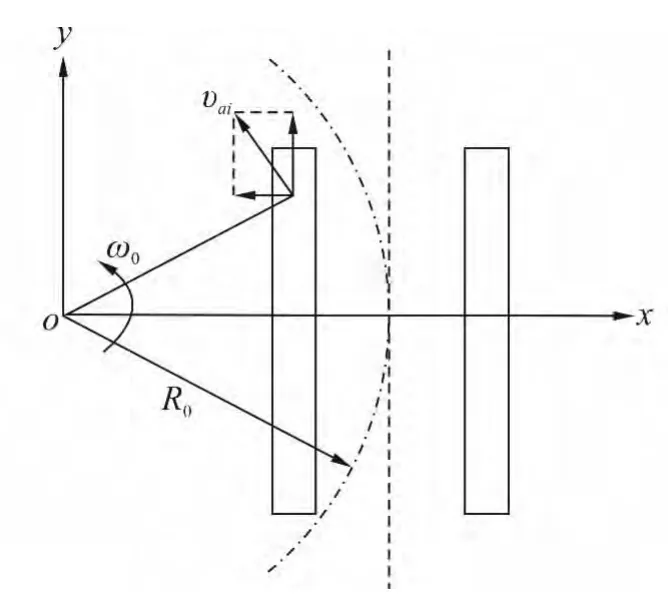
圖1 履帶理想轉(zhuǎn)彎模型Fig.1 Track ideal turning model
圖中轉(zhuǎn)彎半徑R0與角速度 ω0可由式(1)求解[9]:
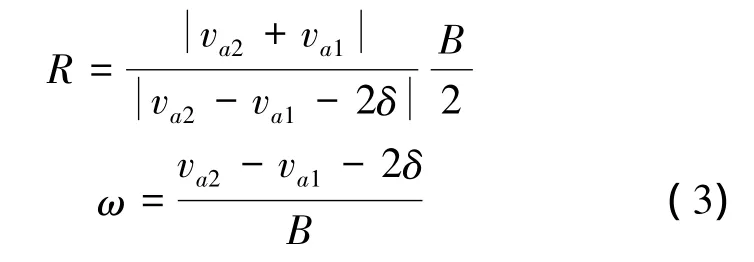
式中:B為兩條履帶的中心距,va1、va2分別為兩條履帶的速度。但是在實(shí)際過程中,因?yàn)槁膸Т嬖诨婆c滑轉(zhuǎn)[4,10-11],同時會發(fā)生側(cè)向與橫向偏移[12-13],所以轉(zhuǎn)彎過程并不是如圖1所示的理想情況,為了使模型更加接近實(shí)際,同時使推導(dǎo)的數(shù)學(xué)模型更加通用,對履帶轉(zhuǎn)彎物理模型進(jìn)行修正。
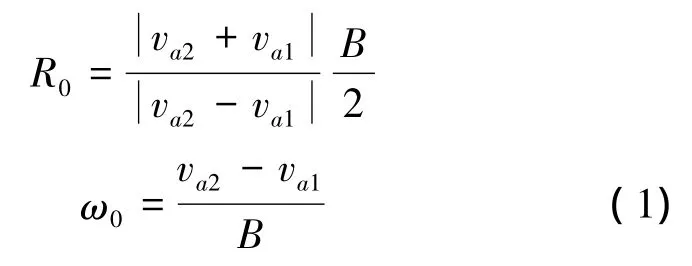
為了便于計算,引入打滑速度δi(i=1,2,i=1代表內(nèi)側(cè),i=2代表外側(cè))。由于滑轉(zhuǎn)率的存在,真實(shí)速度并不等于理論速度,二者之間存在如下關(guān)系:

簡化運(yùn)算,這里令履帶兩側(cè)打滑速度相同。均為δ,則
記履帶接地面速度瞬心產(chǎn)生的縱向偏移為Di(i=1,2,i=1代表內(nèi)側(cè),i=2 代表外側(cè))。這里令A(yù)1=A2=A,D1=D2=D。因此,可以得出履帶實(shí)際轉(zhuǎn)彎模型如圖2所示。
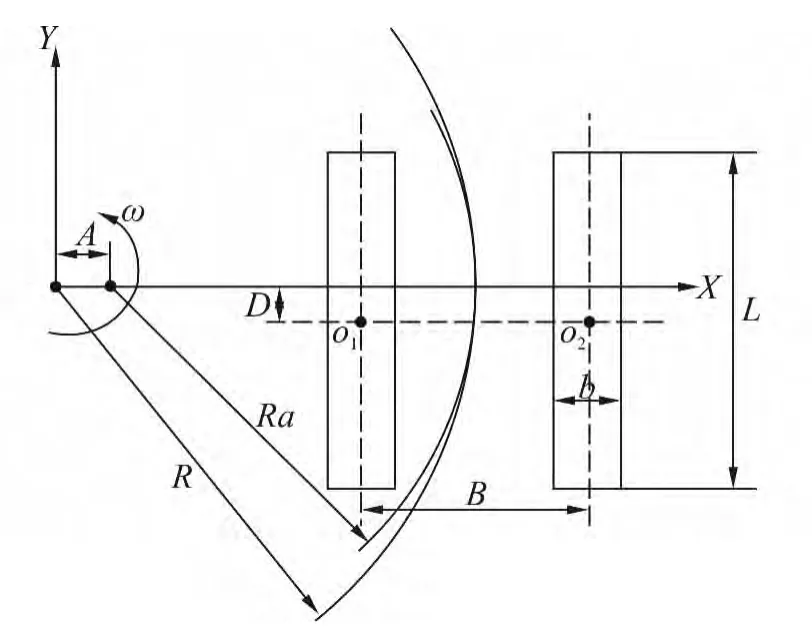
圖2 履帶實(shí)際轉(zhuǎn)彎模型Fig.2 Track real turning model
2 數(shù)學(xué)模型的建立
根據(jù)創(chuàng)建的履帶實(shí)際轉(zhuǎn)彎物理模型,建立履帶轉(zhuǎn)彎數(shù)學(xué)模型。
2.1 履帶與地面摩擦阻力的計算
以一條履帶作為分析對象,將履帶實(shí)際接地面速度瞬心為原點(diǎn),建立如圖3所示的坐標(biāo)系,取履帶接地面一微元dxdy,則有微量摩擦力dFi(其中i=1、2,分別代表內(nèi)、外側(cè)履帶)作用,方向與該點(diǎn)絕對速度相反,有

式中:p(x,y)為接地比壓函數(shù)。
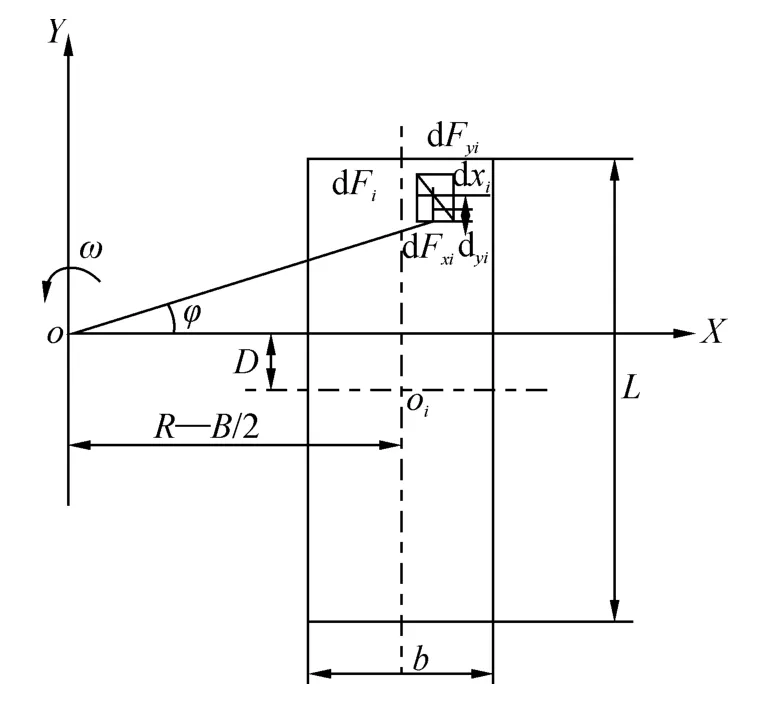
圖3 履帶接地面受力圖Fig.3 Force diagram of track by the ground
dFi在X軸和Y軸方向的分量為
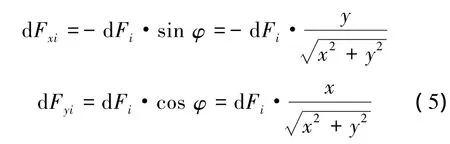
由此可得地面對履帶的轉(zhuǎn)向阻力Moi(繞履帶速度瞬心O)為
其中i=1,2。
當(dāng)i=1時為內(nèi)側(cè)履帶,此時的x、y的積分上下限分別為[R-B/2-0.5b,R-B/2+0.5b]、[-L/2-D,L/2-D]。
當(dāng)i=2時為外側(cè)履帶,此時的x、y的積分上下限分別為[R+B/2-0.5b,R+B/2+0.5b]、[-L/2-D,L/2-D]。
所以,履帶接地面與履帶間摩擦引起的總的轉(zhuǎn)向阻力為

2.2 履帶側(cè)面推土阻力計算
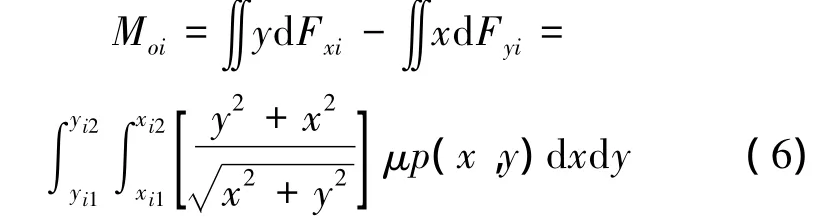
若忽略側(cè)面刮起土堆的質(zhì)量,履帶側(cè)面的受力如圖4所示。其中,Q為下部土壤對楔形土的反作用力,Cθ=ZC/sin θ為單位面積上的內(nèi)聚力,W為單位面積土壤重量,RB(θ)為單位長度推土阻力,φw為板壁摩擦角,θ為破壞面角度,φ為土壤內(nèi)摩角。
圖4 履帶側(cè)面受力圖Fig.4 Force diagram of track by side
根據(jù)Bekker推薦的載荷沉陷量的關(guān)系可以推出式(8)[9]:
式中:z為沉陷量,kc、kφ是土壤內(nèi)聚及摩擦變形模量,n是變形指數(shù)。
履帶兩側(cè)任一單位長度上的推土阻力RB可從力的平衡式中得到
式中:γs為土壤容重。

由于MTi只是θ的函數(shù),MTi的最小值對應(yīng)著一定的θ值,在此θ值下,地面被破壞,故側(cè)面推土阻力產(chǎn)生的轉(zhuǎn)向阻力矩為
將式(12)代入式(11),得
所以履帶側(cè)面推土引起的總的轉(zhuǎn)向阻力矩MT為

忽略履帶內(nèi)部摩擦阻力等因素,因此地面引起的總的轉(zhuǎn)向阻力矩M為

2.3 履帶地面力學(xué)數(shù)學(xué)模型
根據(jù)2.1與2.2節(jié)推導(dǎo)出的計算公式,可以得到通用的履帶地面力學(xué)數(shù)學(xué)模型,如式(16)所示,履帶在軟路面上的受力為兩部分力之和。
對于能夠正常行駛的履帶機(jī)器人,其履帶地面力學(xué)還必須能夠滿足履帶轉(zhuǎn)向條件,即對于勻速轉(zhuǎn)動,驅(qū)動力對旋轉(zhuǎn)中心的距大于阻止轉(zhuǎn)向的力[5]。針對本文中的模型,平行于Y方向摩擦力就是驅(qū)動力對回轉(zhuǎn)中心的力矩:
平行X軸方向摩擦力就是阻止轉(zhuǎn)向的力矩:
機(jī)器人能成功轉(zhuǎn)向的必要條件是驅(qū)動力對旋轉(zhuǎn)中心的距大于阻止轉(zhuǎn)向的力:

3 算例分析
根據(jù)所推導(dǎo)出的履帶地面力學(xué)模型,對正在研制的煤礦救援機(jī)器人履帶行走機(jī)構(gòu)進(jìn)行設(shè)計。煤礦救援機(jī)器人主要用于煤礦發(fā)生事故后,機(jī)器人代替人對事故現(xiàn)場第一時間進(jìn)行井下災(zāi)后環(huán)境探測[14],其工作環(huán)境為煤礦井下。為了使設(shè)計能夠更好地貼近實(shí)際,這里采樣了部分煤泥,依據(jù)土力學(xué)實(shí)驗(yàn)[15-16]測試出了計算所需的土壤力學(xué)參數(shù),包括土壤內(nèi)聚變形模量kc=0.805 kN/mn+1、摩擦變形模量kφ=21.36 kN/mn+2、變形指數(shù)n=0.3、土壤土壤內(nèi)摩擦角φ=30.93°和粘聚力C=11 610 Pa。根據(jù)實(shí)際情況,所設(shè)計的機(jī)器人其履帶接地長度L應(yīng)當(dāng)大于1 000 mm,履帶中心距B應(yīng)該大于700 mm才能滿足要求。根據(jù)需要令B∈[700,800]mm,b∈[80,120]mm。
設(shè)計思路是在履帶寬度b和履帶中心距B的變化范圍內(nèi),尋找轉(zhuǎn)彎阻力矩M最小的組合。因此將式(16)作為目標(biāo)函數(shù),將式(19)作為約束條件,進(jìn)行最優(yōu)化求解,其中機(jī)器人質(zhì)量M=300 kg,地面與履帶間摩擦系數(shù)μ=0.55,va1=0.4 m/s,va2=-0.4 m/s 。
在使用所推導(dǎo)出的數(shù)學(xué)模型進(jìn)行煤礦救援機(jī)器人設(shè)計優(yōu)化的時候,發(fā)現(xiàn)現(xiàn)有的數(shù)學(xué)軟件無法解決二重積分變上限的最優(yōu)化求解問題,因此使用了數(shù)值分析方法結(jié)合C語言編程,運(yùn)用遍歷求解的思想來尋找所設(shè)計煤礦救援機(jī)器人的履帶最優(yōu)參數(shù),最終得到計算結(jié)果如圖5所示。
程序共求解出189組值,每組值對應(yīng)一個B與b。根據(jù)計算的數(shù)據(jù),所設(shè)計煤礦探測機(jī)器人在B=700 mm,b=120 mm時轉(zhuǎn)向阻力矩最小,其值為314.08 N·m。
因?yàn)楝F(xiàn)階段所設(shè)計的煤礦救援機(jī)器人還未取得煤礦安全標(biāo)志許可,故無法在井下煤泥地面進(jìn)行試驗(yàn)。因此選擇與煤泥相近的地面,進(jìn)行原地轉(zhuǎn)向試驗(yàn),可以測出在此狀態(tài)下機(jī)器人的總電流為25 A。根據(jù)電機(jī)特性計算出扭矩約為293 N·m,與理論值相近。
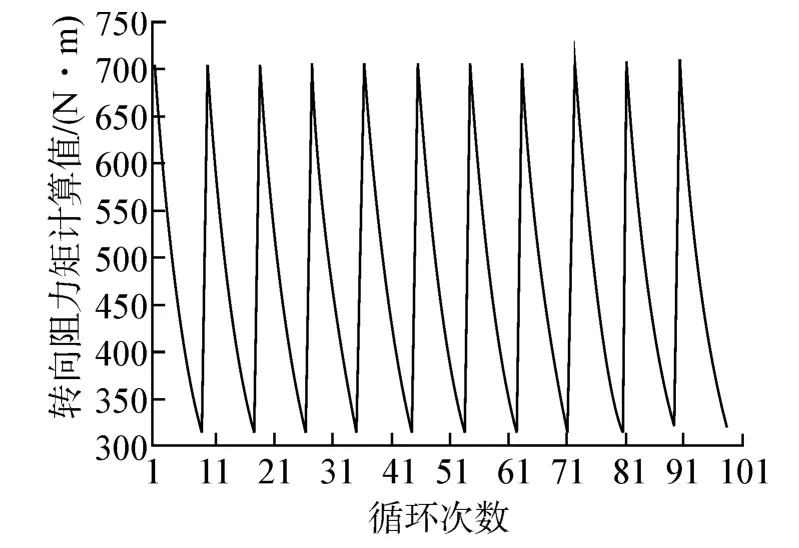
圖5 轉(zhuǎn)向阻力矩圖Fig.5 Steering resistance torque

圖6 機(jī)器人原地轉(zhuǎn)彎試驗(yàn)Fig.6 Experiment of turning about the center
4 結(jié)束語
本文主要推導(dǎo)出了履帶式移動機(jī)器人地面力學(xué)的通用數(shù)學(xué)模型,為設(shè)計優(yōu)化履帶式移動機(jī)器人底盤提供了理論依據(jù)。通過尋找轉(zhuǎn)彎阻力矩的最小值,可以得出履帶的寬度、接地長度與兩條履帶的中心距的最佳值,與此同時還可以理論計算出所需要的最小驅(qū)動力矩,從而為原動機(jī)選型提供理論依據(jù),通過此公式計算出的理論值與實(shí)際測試的結(jié)果相近。
[1]KWON H J,SHIM H,KIM D,et al.A development of a transformable caterpillar equipped mobile robot[C]//IEEE International Conference on Control,Automation and Systems.Seoul,Korea,2007:1062-1065.
[2]FRACZEK J,SUROWIEC M,WOJTYRA M,et al.Multibody modelling of a tracked robot's actuation system[J].Geoplanet Earth and Planetary Sciences,2013:75-93.
[3]趙文生.履帶式行走機(jī)構(gòu)設(shè)計分析[J].湖北農(nóng)機(jī)化,2010(4):56-58.
[4]趙瑜,閆宏偉.履帶式行走機(jī)構(gòu)設(shè)計分析和研究[J].新技術(shù)新工藝,2010(5):50-53.ZHAO Yu,YAN Hongwei.Design analysis and research on tracked walking mechanism[J].New Technology& New Process,2010(5):50-53.
[5]劉國民,黃海東,張萃.履帶底盤轉(zhuǎn)向解析[J].中國工程機(jī)械學(xué)報,2010,8(3):309-313.LIU Guomin,HUANG Haidong,ZHANG Cui.Analysis on turning mode for crawler chasses[J].Chinese Journal of Construction Machinery,2010,8(3):309-313.
[6]MARSILI A,SERVADIO P.Compaction effects of rubber or metal-tracked tractor passes on agricultural soils[J].Soil&Tillage Research,1996,37(1):37-45.
[7]BODIN A.Development of a tracked vehicle to study the influence of vehicle parameters on tractive performance in soft terrain[J].Journal of Terramechanics,1999,36(3):167-181.
[8]孫海濤,王國強(qiáng),王良,等.軟路面履帶轉(zhuǎn)向阻力的研究[J].建筑機(jī)械,1995(9):23-26.SUN Haitao,WANG Guoqiang,WANG Liang,et al.Study of turning resisting moment of tracked vehicles on soft ground[J].Construction Machinery,1995(9):23-26.
[9]劉國民,黃海東.履帶底盤轉(zhuǎn)向軌跡的研究[J].水利電力機(jī)械,1998(5):18-21.LIU Guomin,HUANG Haidong.Study on turning track of caterpillar base plate[J].Water Conservancy & Electric Power Machinery,1998(5):18-21.
[10]WONG J Y.Development of high-mobility tracked vehicles for over snow operations[J].Journal of Terramechanics,2009,46(4):141-155.
[11]YAMAKAWA J,WATANABE K.A spatial motion analysis model of tracked vehicles with torsion bar type suspension[J].Journal of Terramechanics,2004,41(2/3):113-126.
[12]程軍偉,高連華,王紅巖,等.基于滑動及計履帶寬的條件車輛轉(zhuǎn)向負(fù)荷的計算[J].車輛與動力技術(shù),2007(1):40-44.CHENG Junwei,GAO Lianhua,WANG Hongyan,et al.Calculation of tracked vehicle steering-load based on conditions of tracks’slip and track-width considered[J].Vehicle& Power Technology,2007(1):40-44.
[13]史力晨,王良曦,張兵志.履帶車輛轉(zhuǎn)向動力學(xué)仿真[J].兵工學(xué)報,2003,24(3):289-293.SHI Licheng,WANG Liangxi,ZHANG Bingzhi.Dynamic simulation of tracked vehicle steering performance[J].Acta Armamentarii,2003,24(3):289-293.
[14]王勇,朱華,王永勝,等.煤礦救災(zāi)機(jī)器人研究現(xiàn)狀及需要重點(diǎn)解決的技術(shù)問題[J].煤礦機(jī)械,2007,28(4):107-109.WANG Yong,ZHU Hua,WANG Yongsheng,et al.Current status and technical problems in research of coal[J].Coal Mine Machinery,2007,28(4):107-109.
[15]孟為國,趙又群.田間土壤力學(xué)參數(shù)測定方法研究[J].農(nóng)業(yè)開發(fā)研究,2009(1):8-10.MENG Weiguo,ZHAO Youqun.Research for method of testing soil mechanics parameters[J].Research in Agriculture Development,2009(1):8-10.
[16]王文隆,王修斌.地面力學(xué)中土壤參數(shù)的選定及測量方法和儀器[J].農(nóng)業(yè)機(jī)械學(xué)報,1983(4):1-5.WANG Wenlong,WANG Xiubin.The study of soil parameter standard in the terramechanics and the instrument for parameter measuring[J].Transactions of the Chinese Society for Agricultural Machinery,1983(4):1-5.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
工業(yè)設(shè)計(2016年4期)2016-05-04 04:00:23
現(xiàn)代企業(yè)(2015年8期)2015-02-28 18:55:34
現(xiàn)代企業(yè)(2015年6期)2015-02-28 18:51:50
