UUV航跡跟蹤的雙閉環Term inal滑模控制
2015-09-01 05:29:58嚴浙平段海璞哈爾濱工程大學自動化學院黑龍江哈爾濱150001
中國艦船研究 2015年4期
嚴浙平,段海璞哈爾濱工程大學自動化學院,黑龍江哈爾濱150001
UUV航跡跟蹤的雙閉環Term inal滑模控制
嚴浙平,段海璞
哈爾濱工程大學自動化學院,黑龍江哈爾濱150001
針對模型參數不確定及存在外界海流擾動情況下全驅型無人水下航行器(UUV)的航跡跟蹤問題,提出了一種雙閉環Terminal滑模控制方法。首先,為了防止UUV位置和姿態跟蹤控制出現超調量過大的問題,在外環中引入位置和姿態負反饋,設計了UUV的參考速度作為鎮定UUV位置和姿態跟蹤誤差的虛擬控制律。然后,在內環中將虛擬控制律作為跟蹤目標。考慮到傳統滑模控制會出現“抖振”現象,采用Terminal滑模控制方法,在消除“抖振”的同時,使滑模面上的速度跟蹤誤差在有限時間內收斂到穩態。最后,運用Lyapunov穩定性理論證明了該雙閉環Term inal滑模控制系統的穩定性。仿真結果表明,該控制方法能夠實現UUV對空間航跡的精確跟蹤。
無人水下航行器;雙閉環控制;非奇異Term inal滑模控制;Lyapunov穩定性;空間航跡
0 引言
隨著近幾年科學技術的不斷發展,使無人水下航行器(UUV)在海洋資源開發方面獲得了越來越多的應用,航跡跟蹤在UUV完成水下作業的過程中更是扮演著舉足輕重的作用。然而UUV的動力學方程是強耦合、非線性的,水動力系數不易確定且容易受到水下環境(尤其是海流)中各種干擾力的影響,難以獲得UUV精確的動力學模型[1],從而設計具有魯棒性的UUV航跡跟蹤控制器就顯得尤為重要。
目前關于UUV的航跡跟蹤控制,出現了諸如PID、反步、神經網絡、模糊等各種控制方法,而其中滑模控制由于對模型的不確定性和未知的外界擾動有著天然的魯棒性,而且計算過程簡單,因此逐漸成為一種被廣泛采用的航跡跟蹤控制方法。然而,傳統滑模控制器中的不連續項會導致“抖振”現象。雖然有人提出在開關面附近引入一個邊界層,在邊界層內用飽和函數代替符號函數[2-3],進而平滑掉控制器中的不連續項,消除“抖振”現象。但是這將導致邊界層內總是存在較大的穩態誤差,為了提高邊界層內的跟蹤特性,必須采用一些自適應策略來補償不確定項和干擾項。
非奇異的Terminal滑模控制器不僅具有傳統滑模控制器的優點,而且克服了它的缺點,即能夠有效消除傳統滑模控制器中因不連續項所引起的“抖振”問題,從而實現系統的全局漸近穩定。同時,其在傳統的線性滑模面中引入非線性項,使得滑模面上的跟蹤誤差能夠在有限時間內收斂到穩態[4-6]。
在UUV的航跡跟蹤控制中,實現對期望位置和姿態的精確跟蹤至關重要,而傳統的UUV位置和姿態跟蹤控制過程中常出現控制超調現象。超調量如果過大會導致航跡跟蹤偏差急劇增大,甚至無法跟蹤上期望航跡。而包含速度負反饋的雙閉環系統[7-9]可以很大程度上削弱外界擾動對系統的影響,從而減小系統的超調量,使得系統既能穩定工作,又能精確地跟蹤期望航跡。
本文針對在外界擾動和模型參數不確定的情況下,UUV對空間航跡的跟蹤控制問題,提出一種雙閉環Terminal滑模控制的方法。仿真結果表明,該控制方法能夠保證UUV實現對期望航跡的精確跟蹤。
1 UUV動力學模型
描述UUV動力學特性必須建立一個包含UUV剛體動力學及其周圍流體動力學的合理模型,從而形成UUV的動力學模型。該動力學模型[10]通常在其空間慣性坐標系(E-ξηζ)和運動坐標系(O-xyz)下建立,其向量形式可以表示為:


式中:v=[u v w p q r]T是運動坐標系下的廣義速度;η=[x y zφθψ]T是慣性坐標系下的位置和姿態向量;M∈R6×6是慣性矩陣,不僅包括剛體質量,而且包括流體的附加質量;J(η)∈R6×6是慣性坐標系和運動坐標系間的轉換矩陣;C(v)∈R6×6是科里奧利向心力矩陣;D(v)∈R6×6是UUV流體阻尼矩陣;g(η)∈R6×1是重力和浮力產生的恢復力(力矩)向量;τd∈R6×1表示外界海流干擾;B∈R6×p是關于推進器推力分配的一個先驗常值矩陣,且滿足BBT非奇異,p表示推進器的個數;u∈Rp×1表示由各個推進器的推力構成的向量;τ∈R6×1表示各個自由度上所需要的控制輸入。UUV動力學模型參數含義的具體說明如表1所示,空間慣性坐標系和運動坐標系如圖1所示。

表1 UUV的SNAM E符號表示Tab.1 The SNAM E notation for UUV
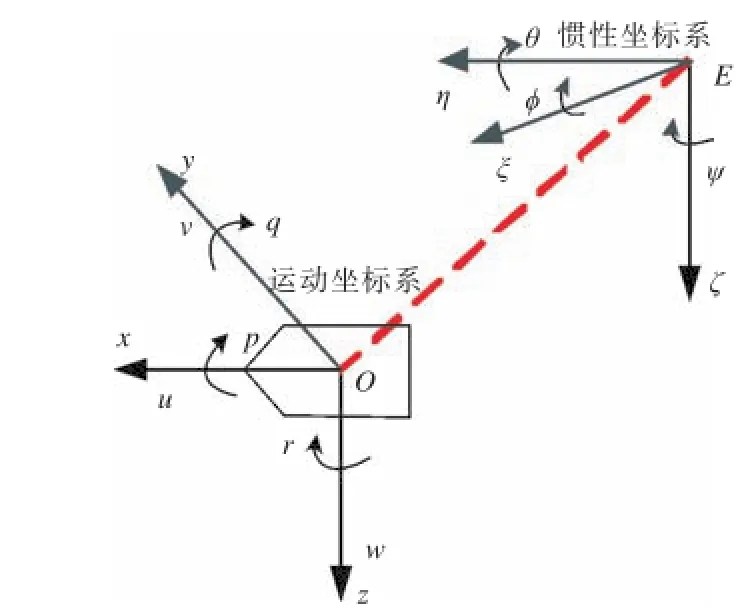
圖1 UUV慣性坐標系與運動坐標系Fig.1 UUV with inertialand body-fixed reference frames
令M=M^+D M,C(v)=C^(v)+D C(v),D(v)= D^(v)+D D(v),g(η)=g^(η)+D g(η),τd=τ^d+Dτd。其中M^,C^(v),D^(v),g^(η),τ^d為式(2)系數的估計值,D M,D C(v),D D(v),D g(η),Dτd為式(2)系數的估計偏差[6],從而式(2)又可表示為

且ρ=-D M v˙-D C(v)v-D D(v)v-D g(η)-Dτd,||ρ||<bτd
+bg(η)+(bC(v)+bD(v))||v||+bM||v˙||,bτd,bg(η),bC(v),bD(v),bM∈R+。
結合UUV的實際情況,做出如下假設:假設1:參數M滿足||M-M^||≤||D M||。假設2:參數C(v)滿足||C(v)-C^(v)||≤||D C(v)||。假設3:參數D(v)滿足||D(v)-D^(v)||≤||D D(v)||。假設4:參數g(η)滿足||g(η)-g^(η)||≤||D g(η)||。假設5:外部海流干擾τd是一個時變的向量。
2 控制器設計
假設6:η和η˙,ηd和η˙d,v和v˙都是有效的。
2.1外環控制器設計
定義線性滑模面如下:

式中:ηe=ηd-η為位姿跟蹤誤差;ηd表示UUV的期望位姿信息;η表示UUV的實際位姿信息;kI∈R6×6為正定常數對角陣。
設計的內環虛擬控制律[11-12]如下:

式中,ρ為一正常數,飽和函數的定義為
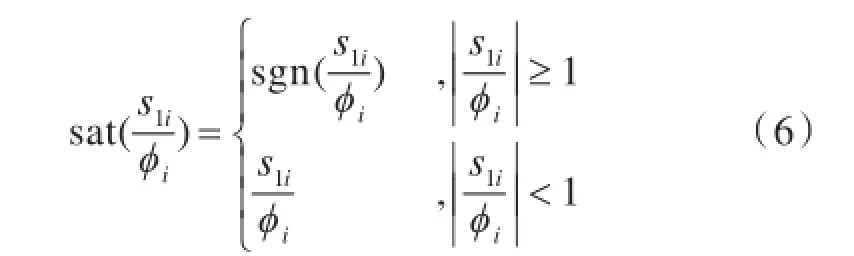
式中,φi為一個正常數,代表在滑模面附近形成的一個很薄的邊界層,i=1,…,6。
證明:構造Lyapunov函數

則V1關于時間的導數為
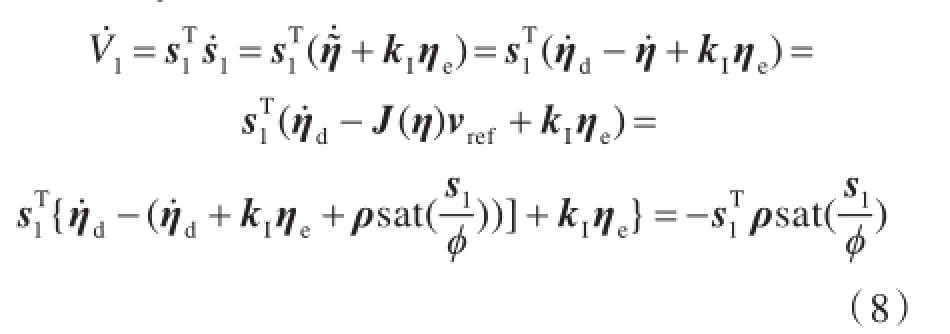
由式(6)可知


因此,可得經過上述證明分析,外環控制系統穩定。
2.2內環控制器設計
定義如下非線性滑模面

式中:速度跟蹤誤差ve=vref-v;m和n為正奇數,且1<mn<2;kI,kv∈R6×6為正定對角陣。
由式(11),得

結合式(2)、式(3)和式(11),設計控制律且






式中:Ψ∈R6×6為正定對稱常值矩陣;a為任意常數。
證明:構造Lyapunov函數

則V2關于時間的導數為
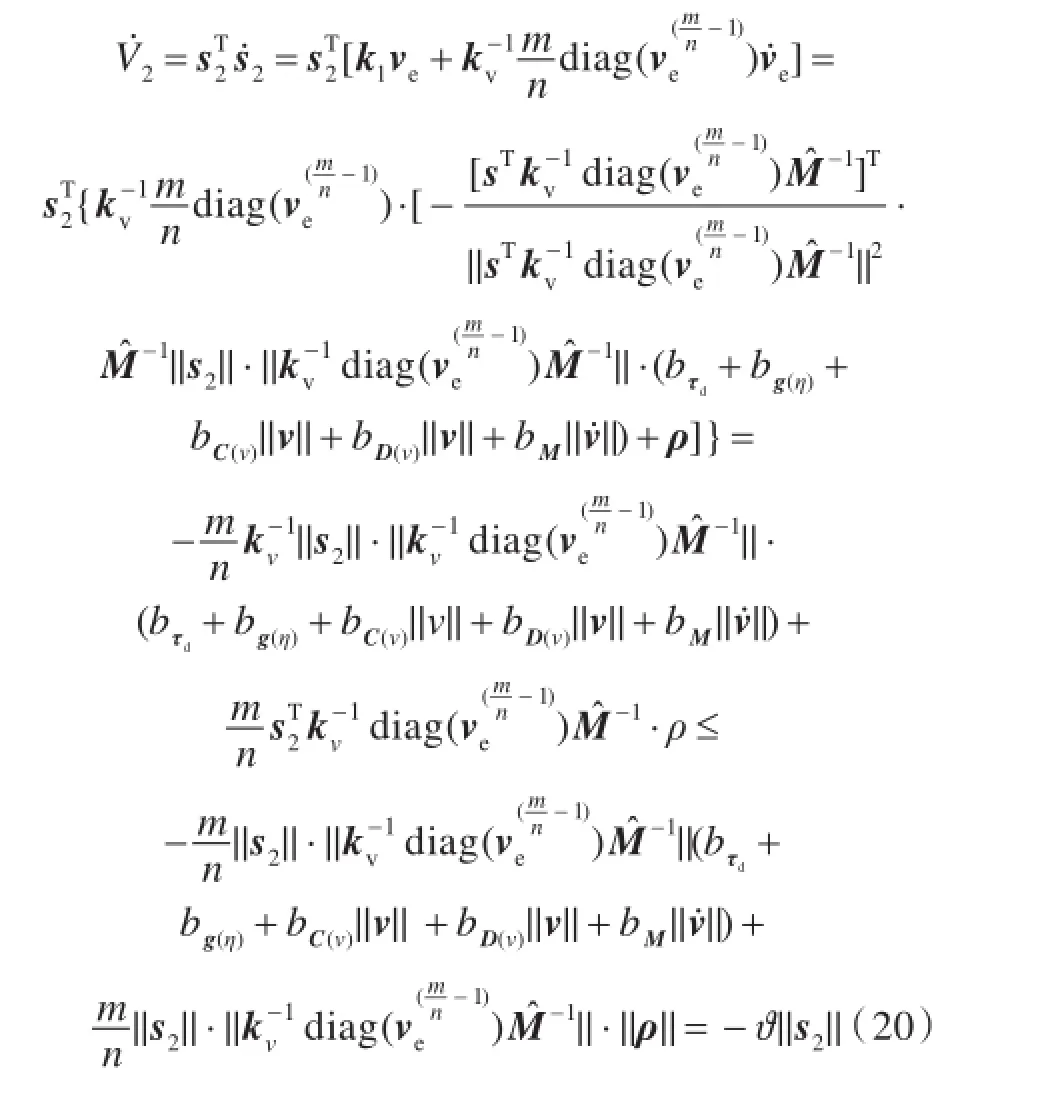
式中,?=mn||kv-1diag(ve(mn-1))M^-1||(bτ+bg(η)+(bC(v)+
dbD(v))||v||+bM||v˙||-||ρ||)>0。
從而可得

對式(21)兩邊同時積分,可得

從式(22)中可以看出,內環控制器可以保證系統狀態漸近收斂到滑模面[2-3]。
由以上分析可知,本文所提出的雙閉環控制系統具有穩定性。該雙閉環控制系統如圖2所示。
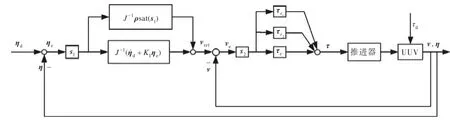
圖2 雙閉環Terminal控制系統框圖Fig.2 Block diagram of the double closed-loop Terminal controlsystem
3 仿真實驗與分析
設定的期望航跡為
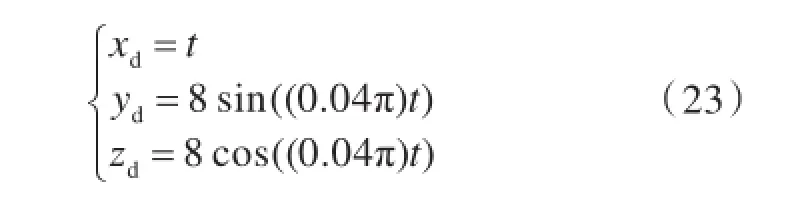
UUV初始位置:(xo,yo,zo)=(-10,7,5)m,初始姿態:(φo,θo,ψo)=(0,0,0)rad,初始航速:(uo,vo,wo)=(0,0,0)m/s,外界擾動為:τd= [30sin(0.01t) 10 sin(0.01t) 10 sin(0.01t) 0 0 0]T。
本文的仿真實驗對象為美國的ODIN[13-15],如圖3所示。該UUV推進器系統由8個推進器組成,動力學模型參數可參見文獻[13]。

圖3 ODINUUVFig.3 ODIN UUV
假設推進器產生的推力能夠滿足需求,且推進器推力與各個自由度上的控制輸入滿足如下關系

式中:τ=[τuτvτwτpτqτr]T表示作用在UUV重心的控制輸入;BT(BBT)-1為矩陣B的廣義逆;
u=[u1u2u3u4u5u6u7u8]T表示各個推進器產生的推力。
推進器的推力分配矩陣B定義如下[13]
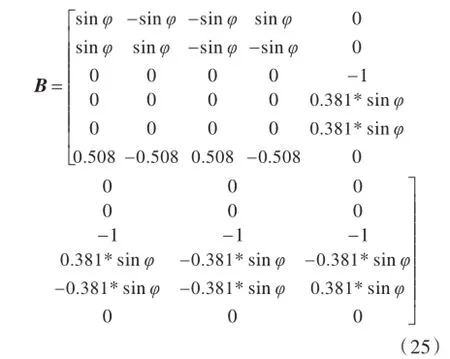
式中,φ=45o。圖4給出了UUV水平方向的推進器(HT)分布概略圖。
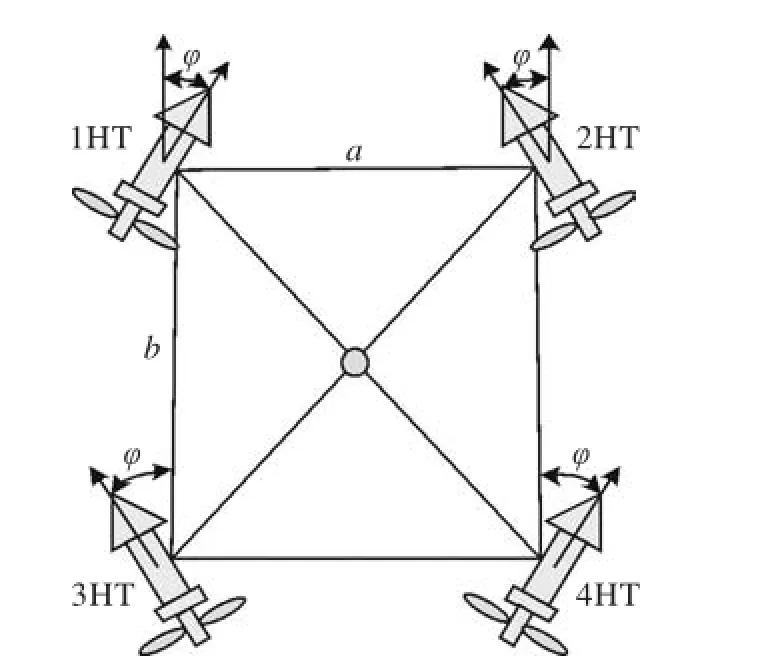
圖4 推進器分布圖Fig.4 Thruster distribution
假設系統模型參數存在-10%的偏差且有外界海流擾動,控制器參數設為m=5,n=3,bτ=9.5,bg(η)=1,bC(v)=1,bD(v)=2.2,bM=2.8,
d
kI=400,kv=50,φi=0.02,kl=1.2,Ψi=16,且
i
iii=1,…,6。
為驗證本文所設計的控制器在實現UUV航跡跟蹤控制方面的優勢,在同樣仿真實驗條件下分別采用改進前的單閉環非奇異Terminal滑模控制器(SCLNTSMC)與改進后的雙閉環非奇異Terminal滑模控制器(DCLNTSMC)進行空間航跡跟蹤控制,得到仿真結果。圖5~圖7給出了系統模型參數存在攝動以及有外界擾動的情況下,UUV分別采用SCLNTSMC和DCLNTSMC進行空間航跡跟蹤的位姿跟蹤曲線和誤差曲線以及空間航跡跟蹤的效果圖。
從圖5~圖6中可以看出,在2種控制器的作用下,UUV位姿跟蹤誤差最終均趨近于零,但在本文所設計的控制器作用下,UUV進行期望航跡跟蹤的起始階段波動幅度較小,且調節時間明顯減小,從而證明本文所設計的雙閉環Terminal滑模控制器有效減小了UUV位姿控制超調的問題,并且保證了位姿跟蹤誤差收斂時間的有限性。
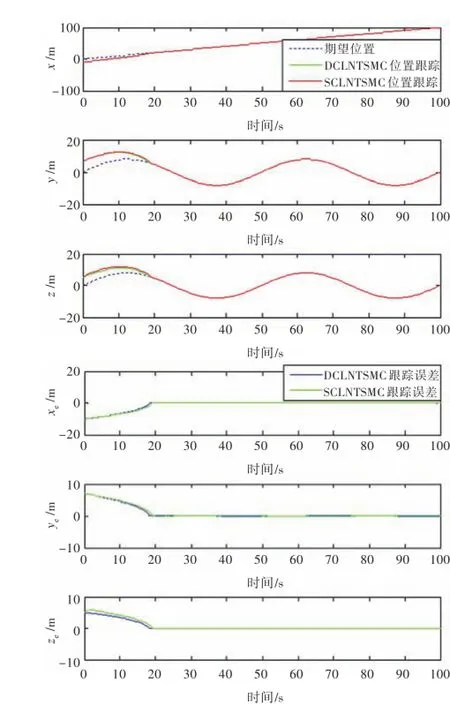
圖5 位置跟蹤及誤差曲線Fig.5 The position tracking and tracking error curves
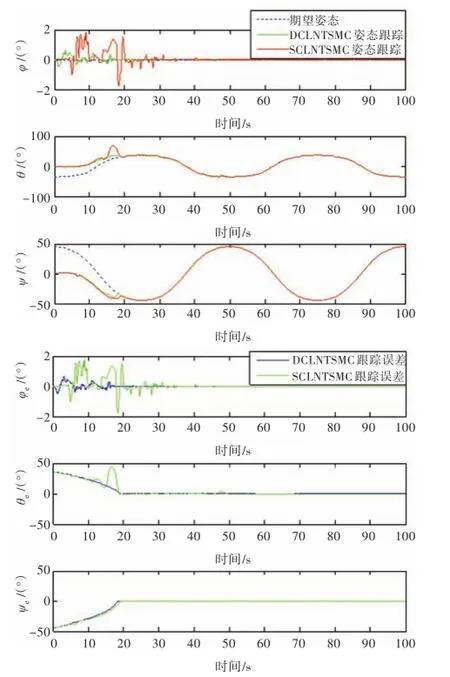
圖6 姿態跟蹤及誤差曲線Fig.6 The orientation tracking and tracking error curves
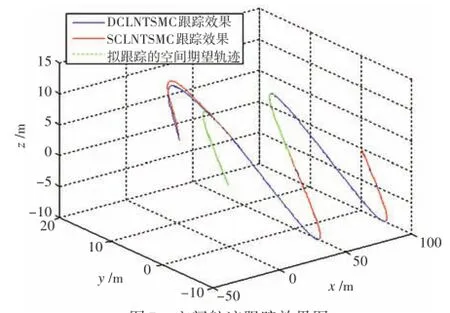
圖7 空間航跡跟蹤效果圖Fig.7 The spatial trajectory tracking effect picture
圖8和圖9分別給出了UUV在DCLNTSMC和SCLNTSMC這2種控制器作用下的控制輸入以及各個推進器的推力曲線。從圖中可以看出,當采用SCLNTSMC時,控制輸入在初始階段波動幅值較大且持續時間較長;而當采用DCLNTSMC時,控制輸入波動的幅值明顯減小,且持續時間較短。經過上述分析,充分說明了本文所設計的雙閉環Terminal滑模航跡跟蹤控制器能夠成功克服傳統滑模控制器中存在的“抖振”問題,實現對UUV的平穩控制。
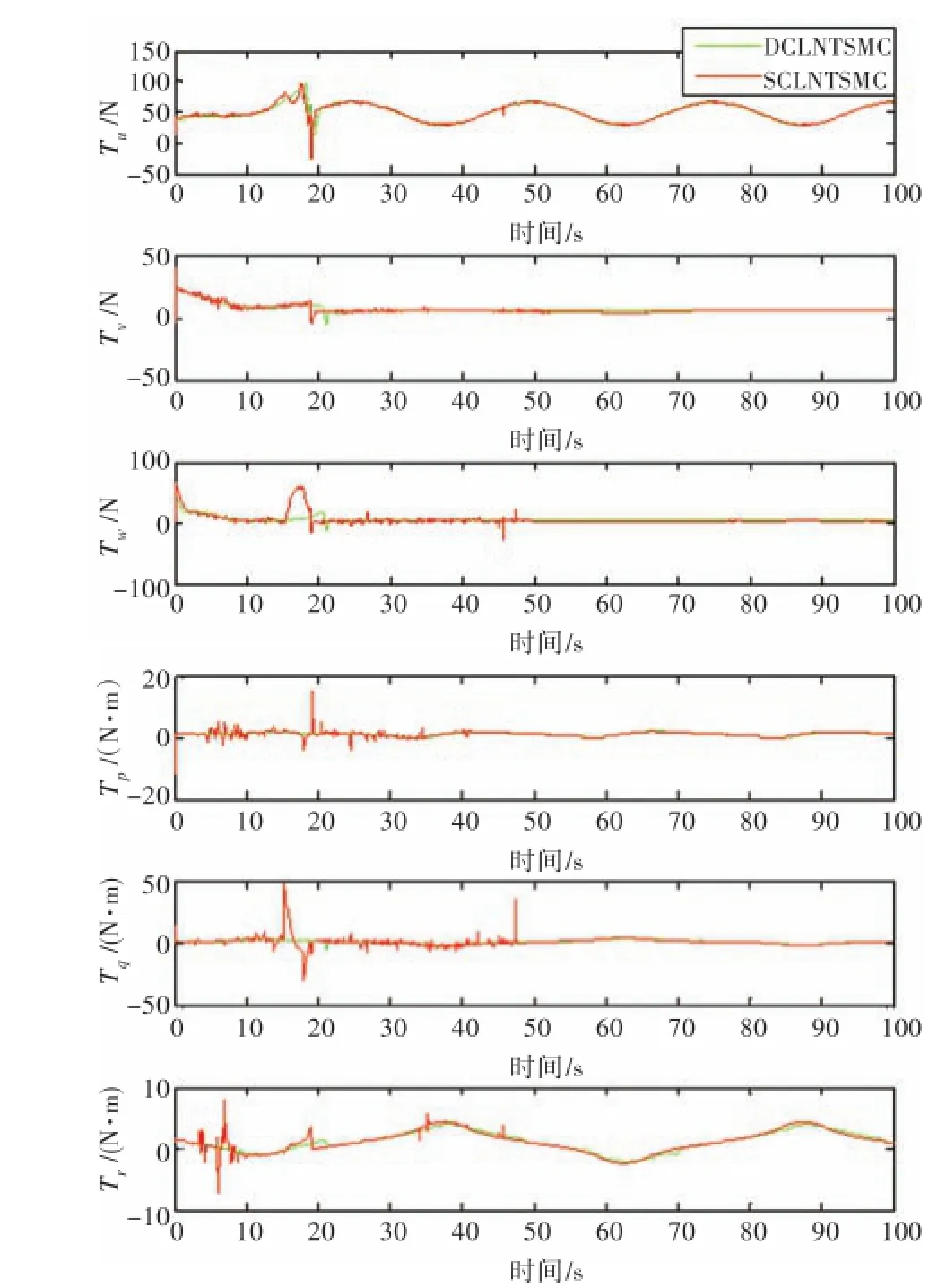
圖8 控制輸入Fig.8 The control input
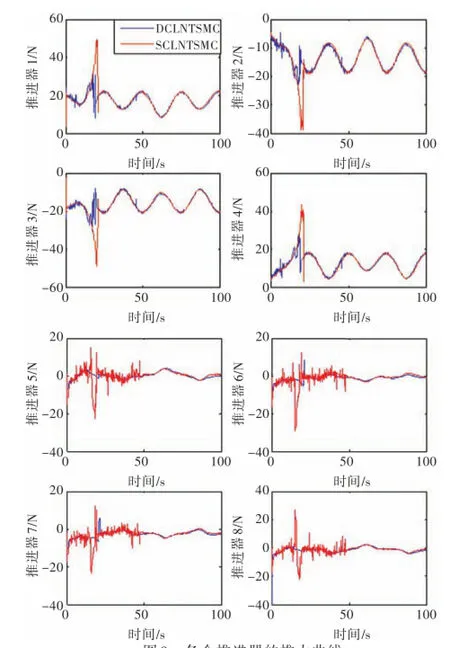
圖9 各個推進器的推力曲線Fig.9 The thrust curvesof each propeller
4 結語
針對模型參數不確定和存在外界海流干擾情況下的UUV航跡跟蹤問題,為了解決傳統控制方法在UUV進行位置和姿態跟蹤過程中出現的超調量過大以及“抖振”等問題,引入過程控制的思想,提出了一種雙閉環Term inal滑模控制方法。首先,在外環中設計了UUV的參考速度,作為鎮定UUV位置和姿態跟蹤誤差的虛擬控制律,同時將外環中設計的參考速度作為內環中的虛擬跟蹤目標,設計了非奇異Terminal滑模控制器。該控制器不僅可以消除傳統滑模控制器的“抖振”問題,而且通過在傳統線性滑模面內引入非線性項,保證了系統的跟蹤誤差可以在有限的時間內收斂到穩態。最后通過Matlab軟件進行仿真,證明了本文所設計的控制器能夠在模型參數不確定及存在外界擾動的情況下,實現UUV對期望航跡的精確跟蹤。
[1]賈鶴鳴.基于反步法的欠驅動UUV空間目標跟蹤非線性控制方法研究[D].哈爾濱:哈爾濱工程大學,2012:7-12.
[2]BESSAW M,DUTRA M S,KREUZER E.Depth control of remotely operated underwater vehicles using an adaptive fuzzy sliding mode controller[J].Robotics and Autonomous Systems,2008,56(8):670-677.
[3]BESSAA W M,DUTRAB M S,KREUZERC E.An adaptive fuzzy sliding mode ontroller for remotely operated underwater vehicles[J].Robotics and Autonomous Systems,2010,58(1):16-26.
[4]LI J,YANG L.Finite-time terminal sliding mode tracking control for piezoelectric actuators[J].Abstract and Applied Analysis,2014(Supp):1-9.
[5]TANG Y.Term inal slidingmode control for rigid robots [J].Automatica,1998,34(1):51-56.
[6]FENG Y,YU X H,MAN ZH.Non-singular terminal sliding mode controlof rigid manipulators[J].Automatica,2002,38(12):2159-2167.
[7]王敏,杜克林,黃心漢.機器人滑模軌跡跟蹤控制研究[J].機器人,2001,23(3):217-221. WANG Min,DU Kelin,HUANG Xinhan.Research on tracking control of robotic sliding mode trajectory [J].Robot,2001,23(3):217-221.
[8]徐亮,邊宇樞,宗光華.水下機器人路徑控制與仿真[J].北京航空航天大學學報,2005,31(2):162-166. XU Liang,BIAN Yushu,ZONGGuanghua.Path track-ing control and simulation of underwater vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics,2005,31(2):162-166.
[9]吳曉鵬,趙祚喜,張智剛,等.基于雙閉環控制的拖拉機車輪轉向控制系統設計[C]//2010國際農業工程大會現代農機新技術應用研討會分會場論文集.上海,2010:11-65.
[10]FOSSEN T I.Handbook of marine craft hydrodynamics and motion control[M].New York:John Wiley and Sons Incorporation,2011.
[11]YU R,ZHU Q,XIA G,et al.Sliding mode tracking control of an underactuated surface vessel[J].Control Theory and Applications,2012,6(3):461-466.
[12]朱齊丹,于瑞亭,夏桂華,等.風浪流干擾及參數不確定欠驅動船舶航跡跟蹤的滑模魯棒控制[J].控制理論與應用,2012,29(7):959-964. ZHU Qidan,YU Ruiting,XIA Guihua,et al.Sliding-mode robust tracking control for underactuated surface vessels with parameter uncertainties and external disturbances[J].Control Theory and Applications,2012,29(7):959-964.
[13]PODDER T K,SARKAR N.Fault-tolerant control of an autonomous underwater vehicle under thruster redundancy[J].Robotics and Autonomous Systems,2001,34(1):39-52.
[14]LIU S Y,WANG D W,POH E K,et al.Nonlinear output feedback controller design for tracking control of ODIN in wave disturbance condition[J].IEEE Oceans,2005,2:1803-1810.
[15]DO K D,JIANG,Z P,PAN J,et al.Global output feedback universal controller for stabilization and tracking of underactuated ODIN-an underwater vehicle[C]//Proceedings of the 41st IEEE Conference on Decision and Control,2002:504-509.
[責任編輯:胡文莉]
A double closed-loop Terminalsliding mode controller for the trajectory tracking of UUV
YAN Zheping,DUAN Haipu College of Automation,Harbin Engineering University,Harbin 150001,China
This paper proposes a double closed-loop Terminal sliding mode control methodology with model parameters uncertainty for the trajectory tracking of fully actuated unmanned underwater vehicles under external current disturbances.Firstly,to prevent the problem of large overshoot during the position and orientation control of UUV,the position and orientation negative feedback is introduced,and the reference velocities are defined in the outer loop,which serves as the virtual control law in stabilizing the tracking errors of position and orientation.With respect to the inner loop,the virtual control law is taken as the tracked target.Considering the undesirable chattering effects of conventional sliding mode control methods,a non-singular Terminal slidingmode controller is adopted,which eliminates the chattering effects as well as ensures the velocities'tracking error on the sliding surface to converge to a steady state within finite time.Finally,the stability of the proposed system is analytically proven using the Lyapunov stability theory,and the simulation results show that the control scheme guarantees precise spatial trajectory tracking of UUV. Key words:Unmanned Underwater Vehic le(UUV);double closed-loop control;non-singular Term inal sliding mode control;Lyapunov stability;spatial trajectory
U644.82
A
10.3969/j.issn.1673-3185.2015.04.017
2014-11-03網絡出版時間:2015-7-29 9:24:03
國家自然科學基金資助項目(51179038)
嚴浙平(通信作者),男,1972年生,教授,博士生導師。研究方向:無人水下航行器(UUV),智能控制。E-mail:yanzheping@hrbeu.edu.cn段海璞,男,1989年生,碩士。研究方向:無人水下航行器(UUV)的軌跡跟蹤控制。E-mail:duanhaipu@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
