插秧機作業面積自動測量系統硬件電路設計
2015-09-09 09:41:12熊中剛賀娟曲祥君等
湖北農業科學 2015年14期
熊中剛 賀娟 曲祥君等
摘要:為實現對插秧機作業區域和作業邊界的自動識別以及作業面積的實時自動測量和其他相關數據采集,對插秧機作業面積自動測量系統電路進行了設計。系統主要由中央處理模塊、傳感器檢測模塊、GPS定位模塊、無線數傳模塊、U盤數據存儲模塊、電源模塊以及上位機遠程監控模塊等7部分組成。中央處理模塊的主控芯片采用STC12C5A60S2單片機,主要負責采集和處理GPS定位模塊以及傳感器檢測模塊對插秧機的定位軌跡信息、發動機其他工況參數信息,并通過對GPS定位信息的分析處理完成插秧機作業面積的自動計算;無線數傳模塊主要負責完成與上位機之間的通訊工作;上位機遠程監控模塊負責通過GPRS組網技術與PC機相連,并能實現對插秧機遠程啟停動作。結果表明,該系統能實現對插秧機作業面積的自動測量,并能實現對插秧機作業面積的遠程監測和啟停動作。
關鍵詞:插秧機;作業面積測量系統;電路設計
中圖分類號:TP277 文獻標識碼:A 文章編號:0439-8114(2015)14-3517-05
DOI:10.14088/j.cnki.issn0439-8114.2015.14.048
Hardware Circuit Design of Rice Transplanter Automatic Measurement
System of Working Area
XIONG Zhong-gang,HE Juan, QU Xiang-jun,CHEN Lian-gui,YE Zhen-huan, AO Bang-qian
(College of Engineering, Zunyi Normal University, Zunyi 563002, Guizhou, China)
Abstract: Aiming to achieve operation area and boundary recognition, operation area real-time automatic measurement and data collection on rice transplanter, an automatic measurement system of working area used in rice transplanter had been designed.The system was composed of the central processing module, the sensors detecting module, the GPS positioning module, the wireless data transmission module, the U disk data storage module, the power supply module and the upper-computer controlling module.The central processing module, using MCU STC12C5A60S2, collected and processed data from GPS positioning module and sensor detecting module,and completed automatic calculation of transplanter working area by analyzing the GPS positioning information. The wireless data transmission module was used for communication with the upper-computer controlling module, which was connected to the host computer via GPRS network technology.And it can realize remote controlling start and stop action on rice transplanter. The result of the experiment showed that the automatic measurement of rice transplanter working area and start and stop action could be remote completed and remote drived by the system.
Key words:rice transplanter; operation area measurement system; hardware circuit design
隨著現代信息技術的不斷發展,插秧機、聯合收割機及旋耕機等農業機械已逐步成為現代農業生產中不可或缺的工具。特別是聯產承包責任制的實行,農戶購買大型農業機械的可能性越來越小,農業機械跨區作業將成為必然[1,2]。農業機械跨區作業中,作業面積是一個很關鍵的數據,時常會出現由于難以準確測量作業面積而引起糾紛,是農業機械進行跨區田間作業計算工時和收費的主要依據。同時田塊的大小直接決定了種子、化肥、農藥等生產資料的投入量[3-5]。傳統的農田面積大多使用皮尺、憑借經驗或采用產量計費的方式,簡單實用,但只適合于小面積的規則矩形田塊[6,7]。為解決傳統測量農田作業面積存在的問題,增強測量方式的普遍適應性,本研究設計了一套插秧機作業面積自動測量系統的硬件電路,能夠實現任意形狀插秧機作業面積的自動測量工作,并應用Visual Basic 6.0開發環境對插秧機遠程上位機監控模塊進行了開發[8],實現遠程參數的采集和控制機械的啟停動作。
1 系統總體方案設計
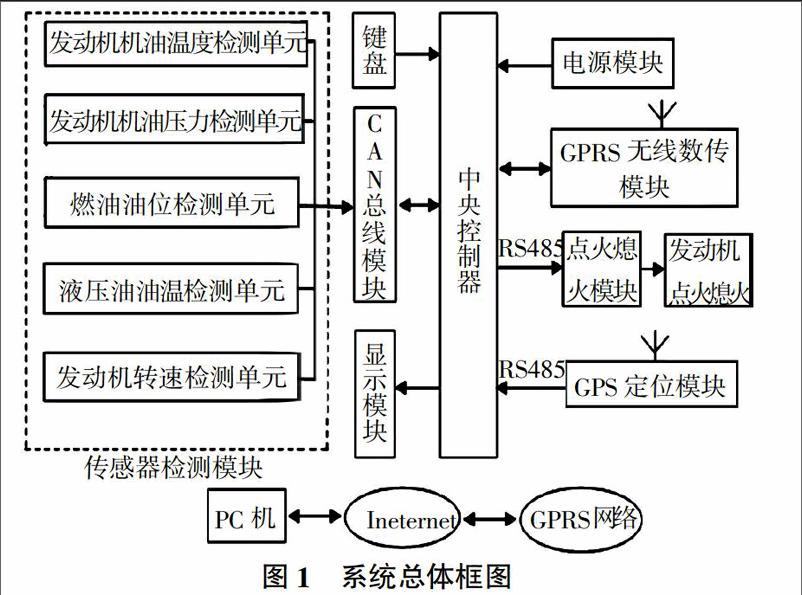
系統主要由中央處理模塊、傳感器檢測模塊、GPS定位模塊、GPRS無線數傳模塊、U盤數據存儲模塊、電源模塊以及上位機遠程監控模塊等部分組成,其總體結構框圖如圖1所示。傳感器檢測模塊主要由發動機機油溫度檢測單元、發動機機油壓力檢測單元、燃油油位檢測單元、液壓油油溫檢測單元和發動機轉速檢測單元等組成,主要用于采集插秧機工作時對發動機工況相關數據;中央處理模塊以STC12C5A60S2為控制核心,主要對傳感器檢測模塊和GPS定位模塊采集來的信息進行分析處理后,通過GPRS無線數傳模塊將相關信息傳到上位機,并將有效信息存儲到U盤數據存儲模塊;遠程監控管理者通過自主開發的上位機操作界面觀察插秧機的作業面積、運行參數和作業位置等實時信息,并針對緊急情況下的需求發送機械啟停命令。
2 下位機硬件電路設計
下位機硬件電路主要包括中央控制核心模塊、傳感器檢測模塊、GPS定位模塊、GPRS無線通信模塊、發動機點火/熄火模塊、CAN總線模塊以及電源模塊。傳感器檢測模塊主要完成插秧機發動機工況數據采集,GPS定位模塊主要完成車體的運動軌跡定位工作,中央控制模塊負責進行信息處理與分析,并完成機械作業區域的識別和面積計算工作,同時兼顧實現有效數據的遠傳工作。
2.1 核心模控制塊電路設計
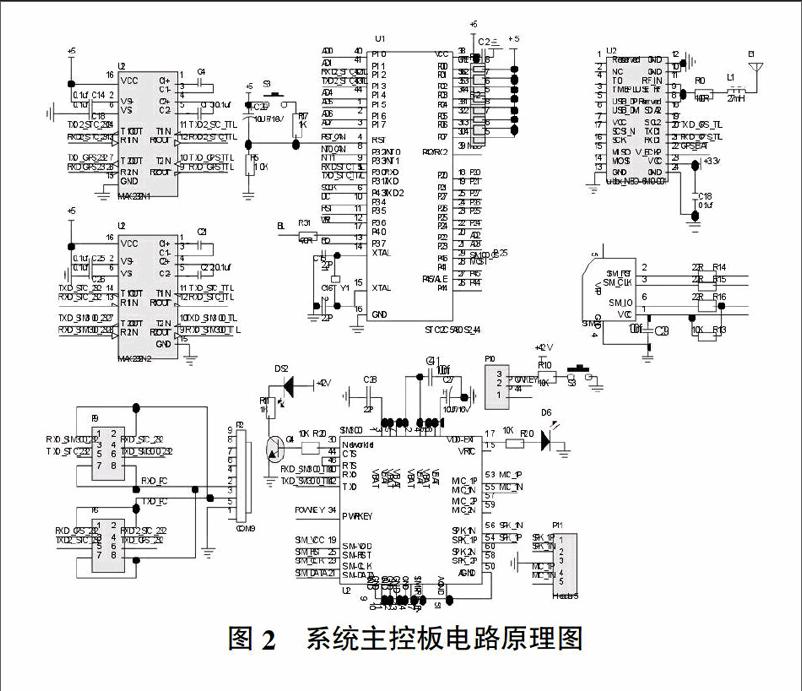
該系統主控電路如圖2所示,包括中央控制單元、GPRS無線數傳單元、GPS定位單元。該系統采用的是STC12C5A60S2單片機,是由宏晶科技(深圳)有限公司生產的一款增強型8051 CPU,1T單時鐘/機器周期,工作頻率是0~35 MHz,相當于普通8051單片機的0~420 MHz,即比普通單片機處理速度快8~12倍;單片機上集成了1 280字節RAM,60 kb的FLASH程序存儲器空間,4個十六位定時器,2路十六位PCA和PWM,共有8路10位精度的ADC,轉換速度高達50萬次/s。系統由STC12C5A60S2單片機與各個硬件模塊連接,控制各自工作,傳感器模塊將檢測到的數據信息經由CAN總線傳送到中央控制單元,與此同時,與GPS定位模塊采用RS485進行通信,讀取相關定位信息,然后經過相應坐標轉換和處理后,完成相關區域識別和面積計算工作,并將定位信息、作業面積和傳感器檢測信息經由GPRS無線通信模塊遠程傳輸到上位機,同時通過單片機U盤數據存儲模塊完成有效信息的存儲和讀取工作。
2.2 傳感器檢測模塊電路設計
傳感器檢測模塊主要用來采集插秧機工作時發動機的相關工況參數。傳感器檢測模塊采集的數據主要包括發動機機油溫度、發動機機油壓力、燃油油位、液壓油油溫和發動機轉速等參數。中央主控芯片STC12C5A60S2通過下發采集命令采集各個傳感器通過CAN總線上傳的數據。該系統設計中分別選用的是ZS-6-01-10L霍爾傳感器、半導體集成的兩端式機油溫度傳感器AD590、應變式機油壓力傳感器BP800。
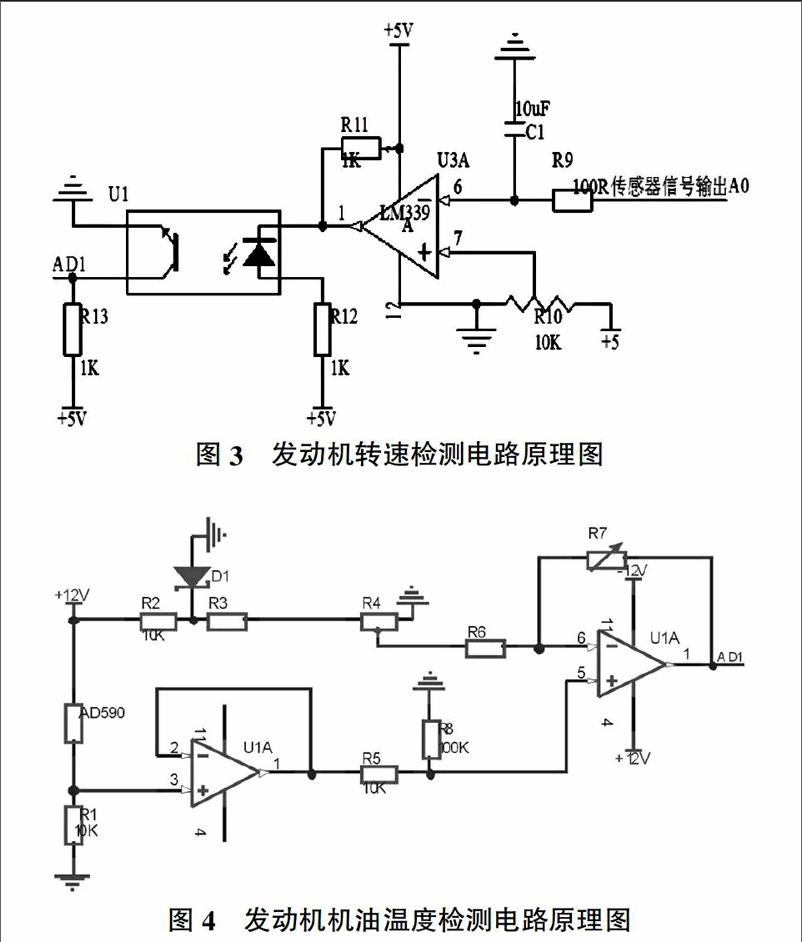
為得到更加準確的插秧機發動機轉速傳感器輸出脈沖信號A0,首先使電路中信號A0經過限流電阻R9和電容C1組成的低通濾波電路后,經由LM339比較電路整形出需要的標準矩形脈沖,R11上拉電阻有效保證了高電平時的電壓,整形電路輸出的矩形脈沖經由光耦作用將其輸入通道前端的現場的干擾信號和單片機隔離開,同時將信號轉換成單片機可以識別的高低電平后送入I/O口,即圖中的AD1端的網絡接點(圖3)。AD590溫度傳感器先將溫度變化轉換成電流變化,之后轉換成單片機容易處理的0~5 V電壓信號,具體電路如圖4所示。
機油壓力的檢測采用應變式壓力傳感器BP800,通常是輸出標準的電流信號,其電流信號范圍為4~20 mA[9]。這種標準的接口,一般可以采取精密電阻轉換成電壓信號,然后直接送入中央處理單元的A/D轉換端口,I/V轉換電路如圖5所示。
2.3 CAN總線模塊電路設計
插秧機車載終端根據需求,需要具有與車載各發動機工況檢測傳感器進行可靠通信的功能,故通過擴展CAN總線接口實現該功能要求,從而達到雙方數據和控制指令的傳輸。其接口的硬件電路主要由CAN總線控制器SJA1000T和CAN總線收發器PCA82C250組成,考慮到插秧機作業環境的復雜多變,為進一步增強總線的抗干擾能力,并沒有直接將CAN總線控制器的TX0和RX0與CAN收發器的TXD1和RXD1相連,而是通過在其中間增加一個高速光耦合器6N137,轉換速率高達10 Mbit/s,具體硬件電路如圖6所示。
2.4 GPS定位模塊電路設計
GPS定位模塊即GPS接收機,通過它來實現插秧機的定位功能,其電路設計如圖7所示。該系統設計中選用的是瑞士Ublox公司生產的NEO-6M-0-001的GPS接收機。該模塊能支持AssistNow Online和AssistNow Offline等A-GPS服務,供電電壓范圍為2.7~3.6 V,當電壓3.0 V時功耗小于120 mW,具有1個USB V2.0,全速12 Mbit/s,1個UART接口、1個DDC接口、1個SPI接口,跟蹤靈敏度為-147 dBm。如圖7中所示的引腳23是GPS定位模塊的電源輸入腳,與主控板中產生3.3 V電壓接口連接,引腳22接了一個備用電池,在系統啟動定位工作時,會立即給電池充電;為了增強GPS定位信號,外接了配套天線,當GPS接收到數據后通過解碼經由引腳20 TXD_GPS_TTL通過RS485通信送到STC12C5A60S 2的串口上。
2.5 發動機點火/熄火模塊電路設計
當檢測到發動機機油溫度和機油壓力對比正常預設值出現較大異常時,為及時保護發動機,可以對發動機進行熄火控制。本研究中插秧機采用的是電啟動風冷4沖程2氣缸OHV汽油發動機,發動機的啟停電路如圖8所示。
該模塊的整個電路主要包括STC單片機處理器、達林頓管陣列芯片ULN2003、74LS05集電極開路輸出的非門陣列、兩個繼電器、MAX485和MAX232通信芯片。采用RS485通信方式與下位機中央控制器進行連接,當在緊急情況下接收到來自上位機的點火/熄火命令后則完成相應動作。電路為提高單片機的驅動能力,采用非門電路以高電平的方式配合驅動ULN2003達林頓管陣列,這樣ULN2003的驅動能力可以達到500 mA,從而可以大大提高單片機的驅動能力[4-7]。
2.6 GPRS無線通信模塊
該系統主要通過GPRS無線通信模塊,接入GPRS無線數傳網絡,將日期、機械作業時間、作業位置、作業面積以及產量等信息傳送到上位PC機完成數據通信。本研究選擇SIMCOM公司生產的 SIM300作為無線遠程數據通信模塊,該無線通信模塊支持GSM和GPRS雙模式通信,內嵌TCP/IP協議棧,能夠在PCS1900、DCS1800和EGSM900 3個不同頻段下工作。具體工作狀態指示燈和通信硬件電路如圖9所示。
SIM300要接入GPRS網絡進行工作,就必須使用到SIM卡,與其操作相關的信號被直接引出到SIM300的SIM卡接口上,其中SIM_DATA作為與SIM卡的串行數據線,用于數據的輸入輸出,SIM_CLK為SIM卡提供操作時鐘,SIM_RST引腳則用來輸出SIM卡的復位信號,整個SIM卡部分的電路如圖10所示。
2.7 電源模塊
電源在整個電路設計中扮演著一個重要角色,使用穩定電源能使電路性能更加穩定可靠,整個系統采用5 V供電,對于該重要部分設計必須考慮到硬件系統對電源具有穩壓和紋波小等要求,當然在有效保證電路電壓穩定輸入的前提下,低功耗也是現今設計非常關注的一個熱點話題。因而針對系統要求,系統得到5 V電源部分采用的是ZA3020芯片實現的。為了使電路中5 V輸出電源的紋波較小,因而在經過ZA3020轉換后的電壓輸出端采用了一個22 μF和0.1 μF的電容,另外芯片的電源輸入端也放置了一個10 μF和0.1 μF的濾波電容,從而有效減小輸入端受到的干擾,使信號穩定可靠的輸入。具體系統輸入電源電壓處理電路如圖11所示。
GPS定位模塊的工作電壓是3.3 V,為有效保證車載電源斷電后仍能正常工作,該設計中增加了一個備用充電電池,該備用電池充電所需電壓是3.3 V,所以先將車體上12 V電源電壓通過輸入電壓處理電路轉換為5 V,然后通過REG1117-3.3降壓芯片的處理,得到3.3 V電壓,具體硬件電路如圖12所示。
然而該系統設計中GPRS無線通信模塊工作所需要的電壓是4.2 V,選用的壓降芯片是MIC29302BU,其可以通過使能引腳端和反饋電阻進行輸出電壓的控制,本設計中通過將使能端置高,設置反饋端R16和R17兩個電阻比值來確定輸出電壓,具體硬件電路如圖13所示。
當芯片1腳使能端置高,芯片導通開始工作,經由公式可以計算出輸出端電壓約等于4.2 V,該電壓值即供給GPRS無線通信模塊工作。
3 上位機遠程監控模塊電路設計
上位機遠程監控模塊的控制單元是上位機和下位機連接的橋梁,此處上位機是采用Visual Basic 6.0開發的PC機監控平臺,另外主要應用單片機連接外設了U盤數據存儲模塊,主要通過GPRS無線組網技術實現數據交換和相應的控制命令,并通過AT指令發送相關控制和數據采集命令。相應的U盤數據存儲模塊電路設計原理圖如圖14所示。
信息的存儲是面積測量系統的重要組成部分,主要包括對日期、機械作業時間、作業位置、作業面積以及產量等信息進行記錄存儲。有效存儲這一系列信息可作為化肥、種子、農藥等生產資料投入量的依據及農業生產管理的參考依據。當系統運行時,由于需要的有效數據量比較大,故為方便定位作業區域及邊界等大量定位數據的存儲,系統采用了單片機U盤數據存儲模塊電路。模塊采用CH375單片機U盤讀寫芯片完成U盤到單片機的銜接,通過大容量RAM完成大容量數據緩存和傳輸,減少設備數據讀寫總時間,延長U盤壽命。
存儲電路中采用5 V電壓工作,為了內部電源節點進行有效退耦,改善USB傳輸過程中的電磁干擾,故在V3引腳外接0.01 μF電容,將CH375的TXD引腳直接接地可使CH375實行并口方式工作。設計中在RSTI引腳與VCC之間跨接了一個0.47 μF的電容,是為了在電源上電時,系統電路能夠完成可靠復位并且有效減少外部產生的干擾。在U盤插入過程中,為了避免CMOS電路CH375出現大電流閂鎖效應而損壞芯片,故在USB插座的電源上并聯了儲能電容C31緩解瞬時壓降。
4 小結
整個系統設計為了具備強干擾性和可移植性,均采用模塊化設計。為對系統設計的可行性和穩定性進行驗證,進行了相關硬件測試工作,同時完成了基于Visual Basic 6.0開發的上位機遠程監控軟件,并結合硬件和軟件設計進行了實地試驗。插秧機在水泥地上模擬田間的作業軌跡,驗證前面系統設計的可行性。試驗結果表明,通過將系統顯示的自動測量面積值與人工實際測量面積值進行對比分析,系統能夠很好地完成作業區域自動識別和面積測量工作,并能遠程實時采集插秧機發動機相關工況參數和控制發動機的啟停。
參考文獻:
[1] 熊中剛,蔣 蘋,胡文武,等.基于STC單片機的智能遠程水塔集群監控系統設計[J].湖北農業科學,2013,52(14):3415-3419.
[2] 成躍樂,宋德平,霍仲芳.農機作業面積測量儀的研制[J].山東農機,2003(2):9-10.
[3] ZHANG N Q,WANG M H,WANG N. Precision agriculture-a worldwide overview[J]. Computers and Electronics in Agriculture,2002,36(2/3):113-132.
[4] ZHAO C J,HUANG W Q,CHEN L P,et al.A harvest area measurement system based on ultrasonic sensors and DGPS for yield map correction[J]. Precision Agriculture,2010,11(2):163-180.
[5] RAYMOND J G M F,ROELF L V,JOOST B. Spatial dimensions of precision agriculture:A spatial econometric analysis of millet yield on Sahelian coversands[J]. Agricultural Economics,2002, 27(3):425-443.
[6] 孫宇瑞,汪懋華,馬道坤,等.沖量法谷物流量測量系統的試驗研究[J].農業機械學報,2001,32(4):48-50.
[7] 胡均萬,羅錫文,阮 歡,等.雙板差分沖量式谷物流量傳感器設計[J].農業機械學報,2009,40(4):69-72.
[8] 熊中剛,賀 娟,羅素蓮.高速插秧機自動導航系統軟件設計[J].農機化研究,2014,36(8):82-86.
[9] 楊效軍.工程車輛運行參數無線遙測系統研究與開發[D].濟南:山東理工大學.2006.
[10] 李 彬,劉 榮,李江全.基于GPS/GPRS的大型農機具遠程監控系統設計[J].江蘇農業科學,2014,42(2):349-352.
