基于機器視覺的前照燈拐點檢測與研究
2015-09-13 11:44:08顧啟民
制造業自動化 2015年19期
關鍵詞:檢測
崔 明,顧啟民
(1.常熟理工學院 電氣與自動化工程學院,常熟 215500;2.中國礦業大學 信息與電氣工程學院,徐州 221116)
0 引言
前照燈是夜間行車照明的主要電氣設備,對行車安全有著重要作用,其中前照燈的光束照射位置是車輛安全檢測的必檢項目[1]。前照燈的光束照射位置又稱近光圖像的拐點,其測量精度將影響前照燈技術參數的確定。我國采用歐洲的ECE標準,使用具有明暗截止線的非對稱近光前照燈[2]。
典型的前照燈近光配光特性如圖1所示,幾何形狀不規則,并具有模糊的明暗截止線。明暗截止線分水平軸和傾斜軸兩部分,其中傾斜軸與水平軸有約15°的夾角,在明暗截止線的右下方有一個亮區。近光檢測的關鍵是明暗截止線的檢測以及拐點的定位[3,4]。
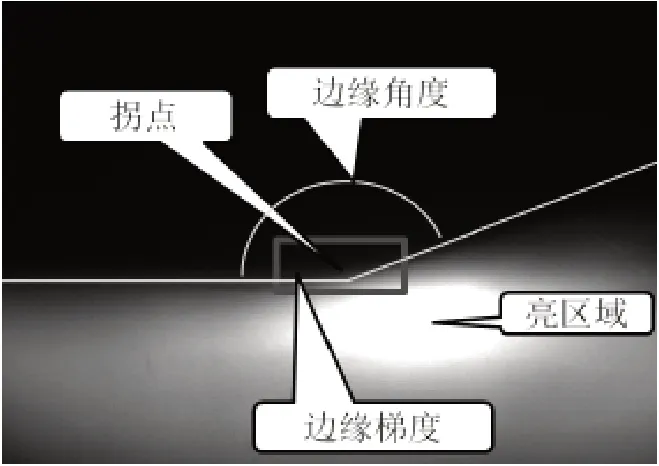
圖1 近光配光特性圖
1 前照燈檢測的硬件系統設計
汽車前照燈檢測技術,從早期的屏幕觀察法發展到現在的CCD感光檢測法。隨著汽車前照燈逐漸由雙光束單光軸向雙光束雙光軸發展,傳統的前照燈檢測方法逐漸被取代,CCD感光檢測法成為前照燈檢測的主流。CCD感光檢測法是利用CCD的感光技術,將采集到的光信號轉化為電信號,然后通過圖像采集卡對模擬的電信號進行模數轉換,將數字信號輸出到計算機,由計算機進行數據處理,就可測出前照燈的拐點信息[5,6],硬件結構如圖2所示。
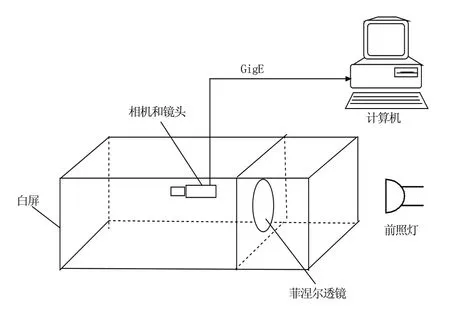
圖2 檢測系統硬件組成
1)CCD攝像機及鏡頭。根據實際檢測需求,選用Basler型號為acA1300-30gm的工業相機以及一個焦距為12mm的computar攝像頭,相機接口為Gige,采用千兆以太網通訊協議進行圖像傳輸。其中鏡頭焦距的選擇是由實際工作距離決定的。
2)菲涅爾透鏡。菲涅爾透鏡是個薄透鏡, 對前照燈發出來的光線進行聚焦,極大地縮短了近光圖像的成像距離。
3)白屏。是近光燈發出來的光線經過菲涅爾透鏡聚焦之后的成像面。
4)計算機。快速處理圖像信息,控制外圍設備,輸出檢測結果等,一般采用高性能的工控機。
2 前照燈拐點的檢測算法
由于制造工藝外界環境等因素的影響,實際采集得到的近光圖像明暗截止線比較模糊。如何快速準確地完成邊緣點的檢測和拐點的定位,是檢測算法的主要工作。針對近光燈配光特性的特點和實際的硬件環境,采取圖像采集、提取ROI、圖像預處理、邊緣檢測、線性擬合等步驟對近光燈圖像進行處理和拐點檢測,具體過程如圖3所示。
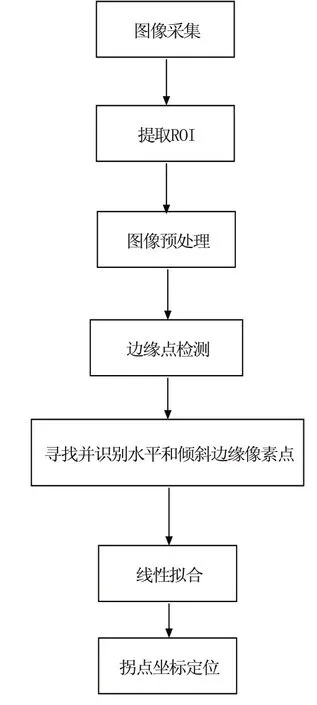
圖3 檢測算法流程圖
2.1 圖像采集
圖像采集是進行圖像處理的前提,在LabVIEW的視覺函數模塊里,提供了低速采集模式和高速采集模式[7],為了實現前照燈拐點的實時快速檢測,本系統采用高速采集模式。LabVIEW視覺子模塊NI-IMAQdx中提供了圖像采集的各種子VI,包括相機的打開和配置、采集圖像、關閉相機等子VI模塊。
2.2 提取ROI
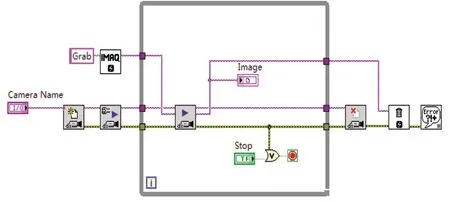
圖4 圖像采集程序
ROI(Region of interesting)是指感興趣區域,一般用于獲取圖像中的特定區域,以便后續的圖像處理和分析。理論上相機和鏡頭的選型是由視場和工作距離決定的,理想的情況下應該讓感興趣的區域盡量充滿整個視野。實際調查中發現前照燈在檢測過程中不僅要考慮近光圖像視場的大小,還要綜合考慮其他因素,近光圖像感興趣的區域可能只占視場的一部分。對前照燈的位置進行校準后,拐點的移動范圍由前照燈自身決定,根據前照燈拐點移動的范圍,我們以圖像中心為基準,設置一個大小為374×324的矩形ROI。可以通過LabVIEW中的函數IMAQ Convert Rectangle to ROI設置矩形ROI,得到的ROI區域如圖5所示。
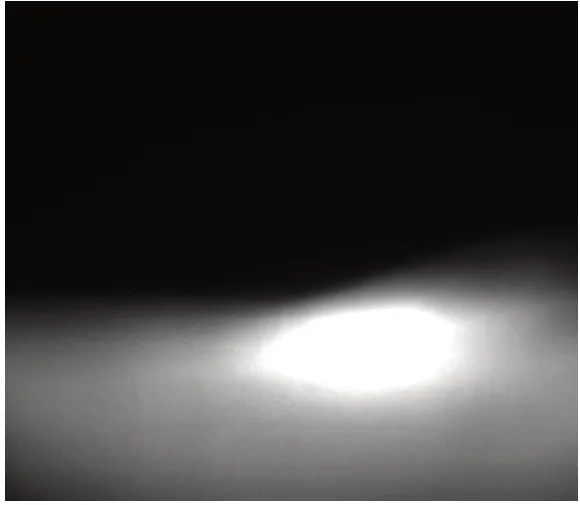
圖5 圖像ROI
2.3 圖像預處理
圖像噪聲是指圖像中各種妨礙人們對其有用信息接受的因素。圖像在采集和傳輸過程中可能會受到內外部的干擾,因此通常需要對采集到的圖像進行特定的圖像預處理,得到更適合后續處理的圖像,提高檢測的精度。
圖像的去噪聲方法有均值濾波、中值濾波、小波去噪等方法。由圖5可以看出近光燈圖像的明暗變化是有規律的,為了避免噪聲點對圖像的干擾,本文采用中值濾波法去除圖像中的噪聲點,提高圖像的信噪比,圖像中值濾波的程序如圖6所示。
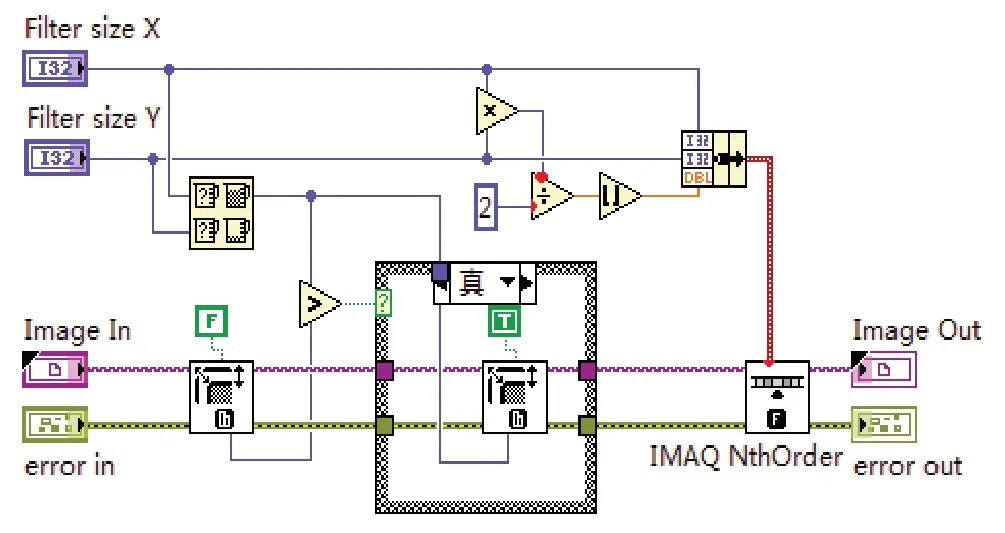
圖6 圖像中值濾波
2.4 邊緣檢測
前照燈近光圖像邊緣存在“是邊緣又不是邊緣”的模糊性,給邊緣提取帶來了很大的難度。目前,在近光圖像邊緣檢測上,應用較廣的有閾值分割法和梯度法。閾值分割法先對圖像進行二值化,再進行邊緣檢測。梯度法先對過圖像預處理,再根據像素點的梯度信息確定邊緣點。文獻[8]提出了一種模糊增強的邊緣檢測方法,達到了圖像增強和邊緣檢測的目的。文獻[9]提出了一種利用先驗條件來提取水平和傾斜邊緣點的方法。許多的改進型算法因其復雜性和較大的計算量而不能在工程應用中得以推廣。研究發現近光燈圖像(明暗截止線附近)在垂直方向上自上而下呈現漸亮的趨勢,基于這種配光特性,本文提出一種基于閾值插值的邊緣檢測法。設圖像函數為f(i,j),掃描第i列像素,如果滿足:
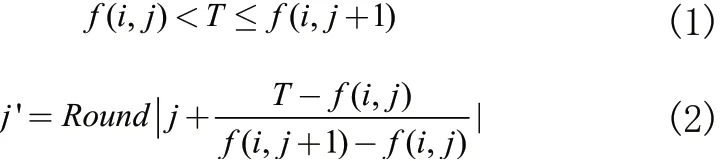
則取f(i,j')作為第i列的邊緣像素點,其中圖像的大小為M行N列,,Round為四舍五入運算,T為設定的固定閾值。基于閾值插值的邊緣檢測法本質上屬于一維線性插值法,主要適用于圖像在某一方向上具有漸進變化的情況。它的主要優點是檢測出的邊緣更加平滑,無干擾噪聲,更符合實際的情況。鑒于圖像邊緣的模糊性,采用梯度法無法獲取有效的邊緣信息。圖7顯示了運用閾值分割法和閾值差值法對圖像進行邊緣檢測的效果,可以看出相比閾值分割法,運用閾值差值法處理得到的圖像無異常的噪聲像素點,而且圖像邊緣輪廓更加清晰。
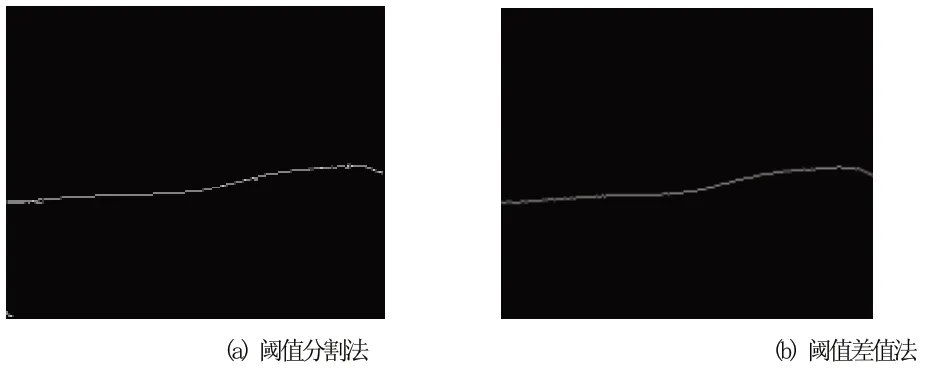
圖7 邊緣檢測
2.5 線性擬合與拐點檢測
線性擬合與拐點檢測主要包括三部分內容:尋找并識別水平和傾斜的邊緣點、對水平和傾斜的邊緣點進行線性擬合和拐點檢測。
由圖7可以看出明暗截止線在水平和傾斜部分的斜率都是變化的,而拐點的位置恰好在亮區域附近。本文首先采用Blob分析法定位拐點所在的邊緣點區域,然后運用梯度法搜索水平和傾斜邊緣點的分界點,具體識別算法如下:
1)采用Blob分析法識別出亮區域的位置,提取出亮區域附近的邊緣點。
2)設定坐標增幅閾值Th。
3)對提取出的邊緣點,從左向右對相鄰兩列像素的行坐標進行比較,如果某點之后連續多點的增幅都不小于閾值Th,則判斷該點為水平和傾斜邊緣的分界點。
4)分界點左側的像素為為水平邊緣點,分界點右側的像素為傾斜邊緣點。
可以通過LabVIEW中的IMAQ Count Objects函數設置固定閾值分割白色區域,并計算出白色區域的輪廓和質心,檢測結果如圖8所示[10]。
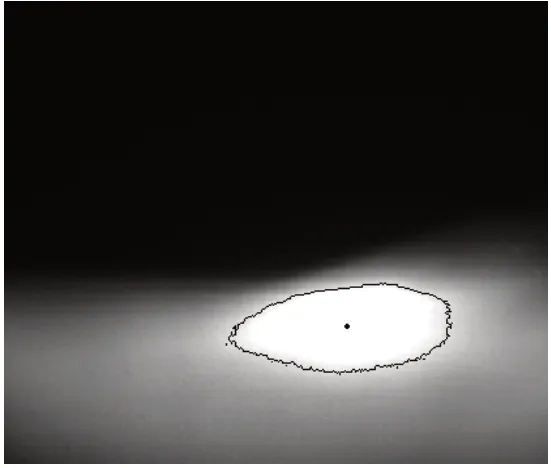
圖8 亮區域檢測
識別出水平和傾斜邊緣點之后,需要將邊緣點擬合成水平和傾斜邊緣線。常用的直線檢測方法有Hough變換法和最小二乘法[11]。由于Hough變換計算量比較大,實際中應用較少,擬采用運算量較小的最小二乘法對水平和傾斜邊緣點進行線性擬合。最小二乘法是一種在方差意義下對實驗數據實現最佳擬合的方法。利用最小二乘法對水平和傾斜邊緣點進行線性擬合,對擬合得到的兩條直線求交點,即可得出拐點的位置坐標,LabVIEW中的線性擬合函數可以對輸入的離散點進行線性擬合,檢測結果如圖9所示。
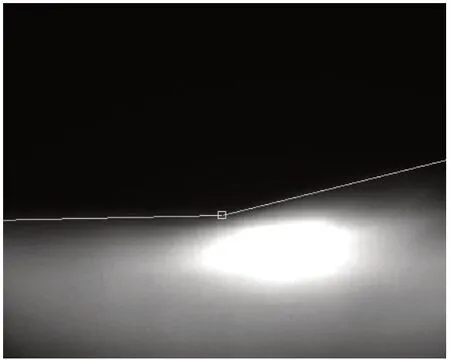
圖9 線性擬合和拐點檢測
3 實驗結果與分析
根據硬件設計的結果搭建如圖10所示的實驗裝置,在采集近光燈圖像之前要對前照燈的位置進行校準,保證菲涅爾透鏡中心與被檢測前照燈的發光體中心在水平及垂直坐標系上重合。對準的目的主要是使發光體的光盡可能多的進入受光箱,因為菲涅爾透鏡的大小是一定的。
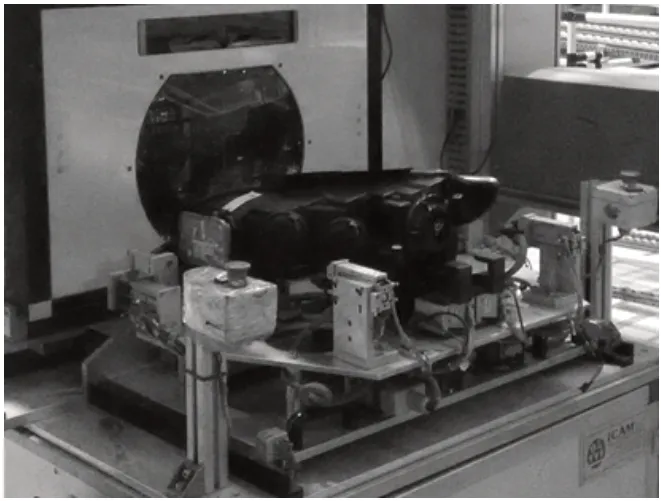
圖10 檢測系統實驗裝置
基于LabVIEW的生產者消費者模型,開發了前照燈拐點檢測的軟件系統,對圖像實時采集并處理[12]。圖像的實時采集程序采用基于事件驅動的框架,減輕了CPU的負擔。軟件系統分兩種工作模式:手動模式與自動模式。手動模式手動采集和處理圖像,自動模式實時采集并處理圖像。
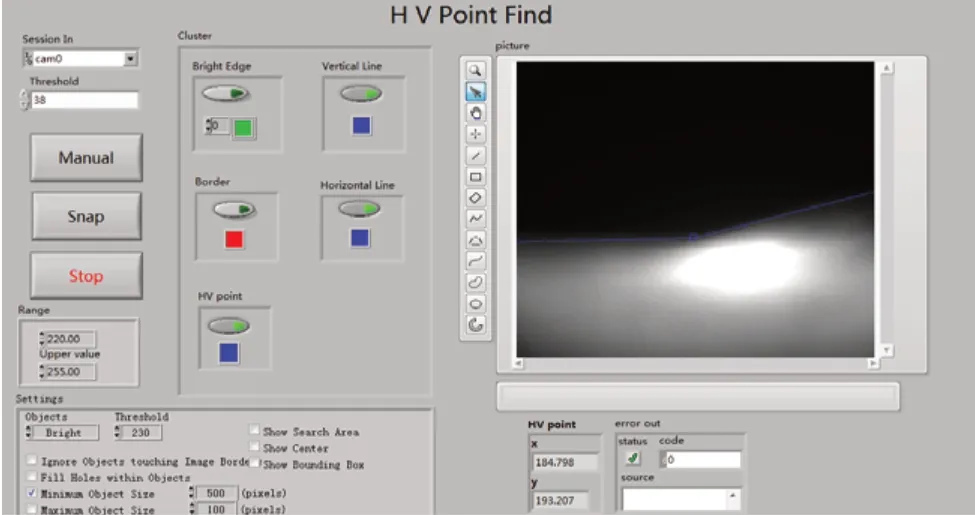
圖11 軟件界面
實驗運行環境CPU為Inter Core i5-2430M,2.40GHz,內存為4GB,操作系統為Windows7,實驗數據顯示,單幀圖像從采集到處理的時間為0.25s,圖像處理的時間可以滿足工業檢測的要求。為驗證系統的穩定性,在實時采集模式下,每隔0.5s記錄一次拐點的位置,重復檢測20次,由圖12所示結果看,拐點的坐標誤差范圍在3個像素以內,當前相機的空間分辨率為0.123mm/pixel,即拐點誤差為0.369mm,可見算法的穩定性較好。
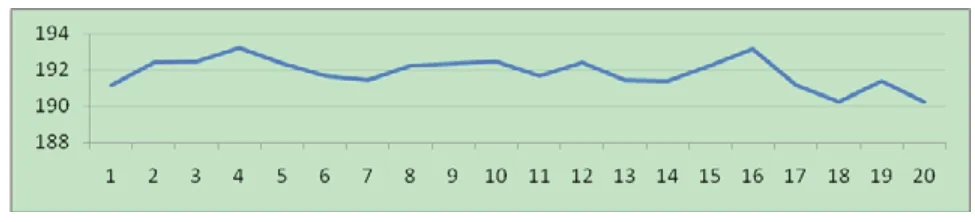
圖12 拐點位置重復性檢測
4 結論
本文通過對前照燈近光拐點的檢測技術進行研究,提出了一種基于閾值插值的方法,提高了邊緣檢測的抗干擾性;為了提高拐點的定位精度,提出了一種Blob分析法和梯度法相結合的策略來檢測水平和傾斜邊緣分界點。最后基于LabVIEW的生產者消費者模型開發了一套前照燈近光拐點檢測系統。實驗表明該系統的檢測速度快,穩定性好,可以滿足前照燈拐點的檢測要求。
[1] 金晅宏,戴曙光,穆平安.視術覺技在車燈光軸交點檢測中的應用研究[J].儀器儀表學報,2001,22(3):266-268.
[2] 陸藝.機動車前照燈檢測儀校準器檢測系統的研制[D].成都:四川大學,2003.
[3] 張勇.基于圖像處理的汽車前照燈檢測系統的研究[D].長春:長春理工大學,2006.
[4] 趙亞南,李業德.Sobel算子和最小二乘法在汽車前照燈近光檢測中的應用[J].計算機與網絡,2009,45(30):240-244
[5] 朱柳建.基于圖像處理的汽車前照燈檢測技術的研究[D].南京:南京林業大學,2005.
[6] Bevilacqua.A.,Gherardi.A,Carozza, L.An industrial visionbased technology system for the automatic test of vehicle beams ,Industrial Electronics ,2009,(1): 2178-2183.
[7] Christopher G R. Image Acquisition and Processing with LabVIEW[M].Boca Raton: CRC Press,2004.
[8] 云穎.汽車前照燈全自動視覺檢測系統[D].上海:上海理工大學,2009.
[9] 汪洲燕.汽車前照燈在線調整檢測系統的研究[D].杭州:浙江大學,2007.
[10] Thomas K.Image Processing with LabVIEW and IMAQ Vision[M].Upper Saddle River:Prentice Hall PTR,2003
[11] 何揚名,戴曙光.Hough變換在車燈光軸交點檢測中的應用[J].計算機工程與應用,2009,45(30):240-244
[12] 龍云,李小明,向建化.基于LabVIEW的視覺檢測系統軟件框架設計[J].機電工程技術,2013,42(6):141-143.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
