基于滾珠絲杠的四自由度點膠機器人設計研究
2015-09-13 11:50:14湯雪松
制造業自動化 2015年17期
陳 曦,湯雪松
(河北工業大學 控制科學與控制工程學院,天津 300000)
0 引言
點膠機器人又稱涂膠機、滴膠機、打膠機、灌膠機等,專門對流體進行控制。并將流體點滴、涂覆于產品表面或產品內部的自動化機器。點膠機器人主要用于產品工藝中的膠水、油漆以及其他液體精確點,可以用來實現打點、畫線、圓型或弧型[1]。常見點膠機多為直線運動式或者二維、三維空間運動式,運動的自由度間成空間直角的關系。本文設計的四自由度直角坐標機器人是一個可以實現空間4個自由度運動的機構,可以滿足更高的移動要求。直角坐標度機器人驅動方式常見的有氣動、液壓和電動驅動,但氣動驅動過于粗糙,液壓驅動系統結構太龐大,考慮到系統本身控制比較復雜,為了保證穩定性和準確性選擇以步進電機為驅動裝置、以滾珠絲杠為傳動裝置實現對系統的控制[2]。從整體來看系統將具有更好的穩定性,更高的精度,可以滿足整個三維空間的運動。
1 主體設計
本文研究的直角坐標機器人是四個自由度,即X軸,Y軸,Z軸,R軸。X、Y、Z軸為直線運動,R軸為旋轉運動。X、Y、Z軸的直線運動有行程限制,所以需要位置反饋。R軸作為旋轉軸不需要光電開關或者行程開關來限制行程[3]。結構上,Y軸垂直放置于X軸的支撐滑塊上,實現一維平面的直角運動系統,Y軸的支撐滑塊豎直放置Z軸,在Z軸的底部連接一根金屬長桿,長桿下端與法蘭盤連接,由步進電機進行驅動,從而實現旋轉運動。圖1為整體效果圖。

圖1 整體效果圖
2 機械結構
2.1 直線運動軸
以X軸為例,如圖2所示。運動軌道安裝在固定基準面上,直接支撐運動滑塊,運動滑塊位于軌道上,一邊各帶兩個,滑塊與軌道通過滾珠耦合在一起,構成了直線導軌。運動滑塊之上安裝的是支撐滑塊,作用是為Y軸的支撐鋁型材及滑臺提供等高且水平的支撐,由于直線軸有行程限制,為了保證運動安全,在軌道兩端安裝了光電開關來限位。滾珠絲杠水平放置在滑臺內部軌道中心位置,絲杠兩端由軸承支撐座支起以防止絲杠受力不均產生形變影響機械性,聯軸器兩端分別與絲杠和步進電機相連,這使得步進電機與絲杠之間實現了軟連接,有效地緩解了兩軸不同心的問題。滾珠絲杠利用滾珠運動帶動滑塊運動,其啟動力矩極小,不會出現滑動運動那樣的爬行現象,從而確保了精確的微進給,實現高精度的定位[4]。Y軸與Z軸的組裝與X軸相似,這里將不再敘述。
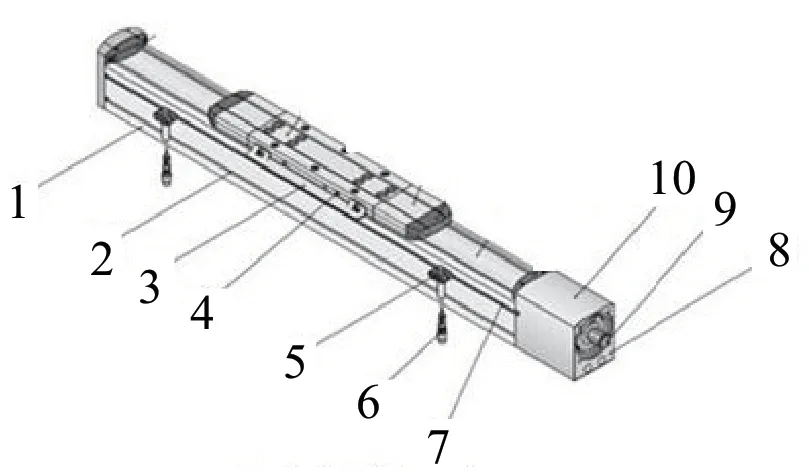
圖2 X軸結構解析圖
2.2 旋轉運動軸
R軸為旋轉運動軸,也是用于安裝點膠裝的軸,結構與直線運動軸基本一致,圖3為R軸結構示意圖。該部分最重要的問題就是同心,由于R軸的操作機構為法蘭盤,本身有重量,并且法蘭盤會帶負載,所以軸在轉動過程中很容易出現擺動問題,最終可能會造成軸變形彎曲。為解決該問題,在Z軸下方位置安裝兩個軸承來做約束,上部采用角接觸球軸承用于承受軸向載荷,下部采用深溝球軸承用于承受徑向力。
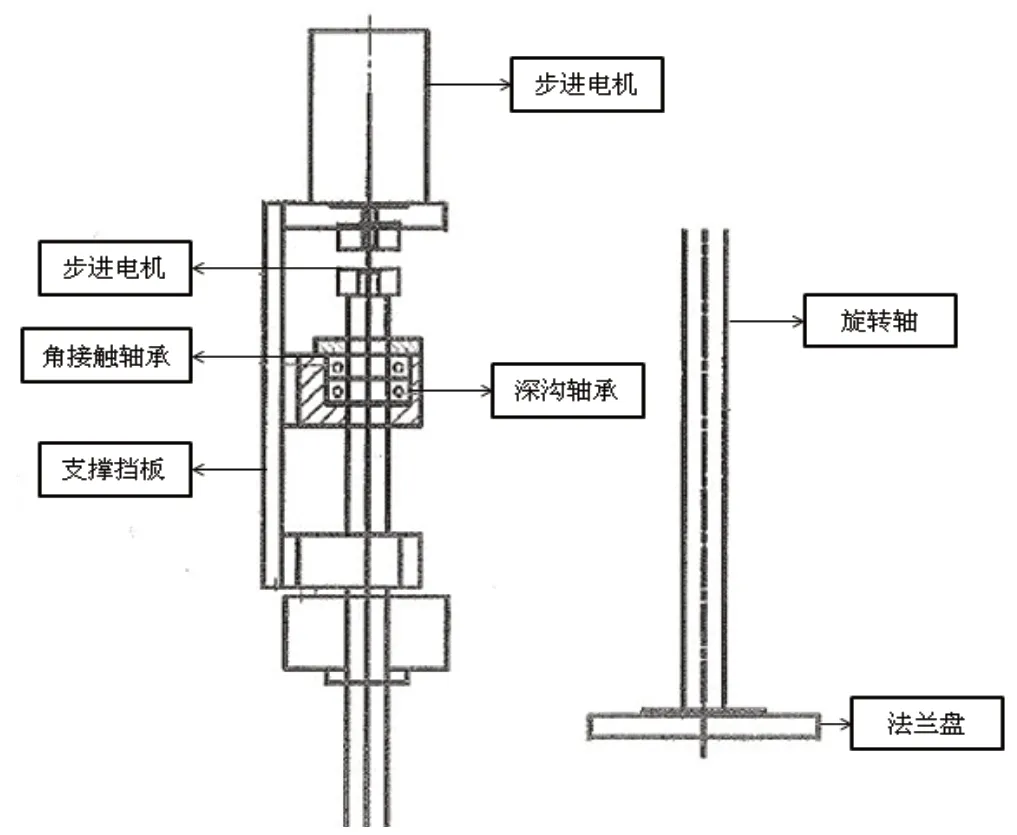
圖3 R軸結構示意圖
3 控制部分
如圖4所示,上位機通過CAN總線控制單片機,經C8051F500的C2D/C2CK接口將程序輸入其中。單片機信號經過ULN2003應用電路(達林頓晶體管陣列)與步進電機驅動器相連,驅動器驅動電機動作,其中PUL為脈沖,DIR為電機方向,ENA為電機使能信號。
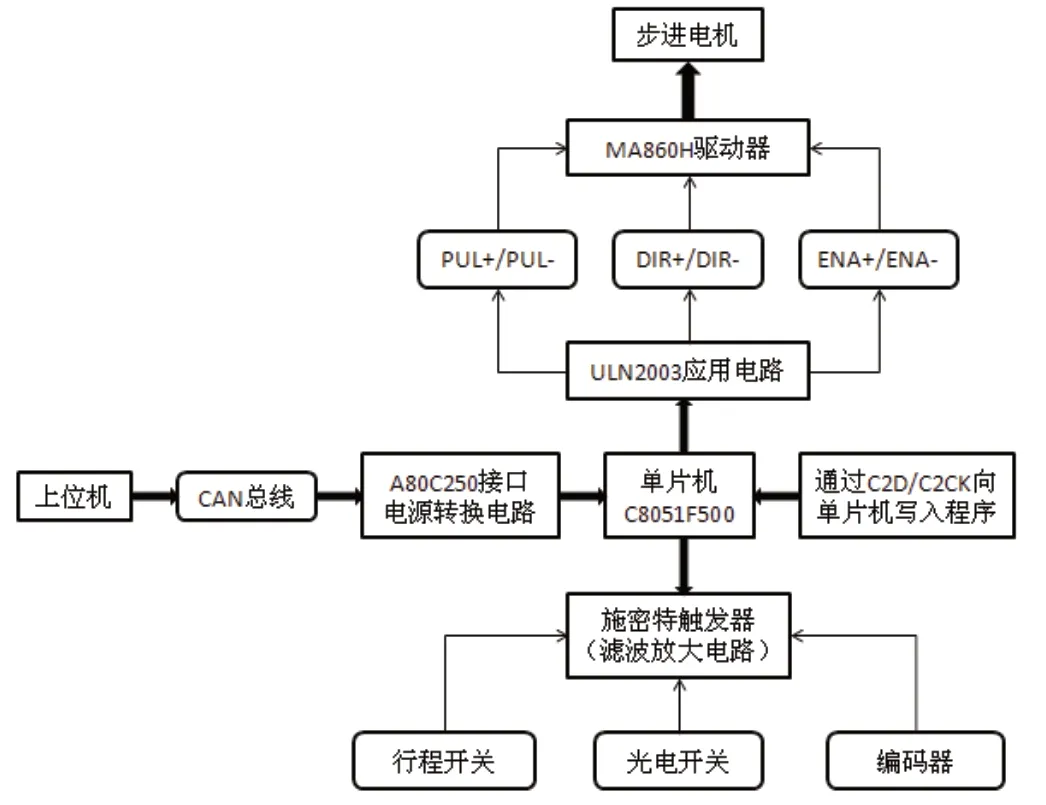
圖4 系統通訊及控制流程
按照設計的要求,XYZ軸是單自由逐一動作,同時配合R軸的旋轉運動。即X軸運動時,Y軸、Z軸靜止,同理Y軸、Z軸也是如此。對于直線運動軸,為了保證機器人的運動在有效行程內,XYZ軸分別安裝了光電開關,用于給單片機發信號使步進電機停止工作。此外為了防止光電開關失效的情況,在光電開關的外端還安裝了行程開關,用于機械臂超出行程的觸發[5]。光電開關或行程開關發出的信號會通過施密特觸發器的濾波放大后送入單片機處理。
為實現各軸的精確控制,本文除了采取比較好的驅動、傳動裝置外,還采取了閉環控制的控制策略,將光電編碼器輸出的A相、B相脈沖做異或處理,得到兩倍頻率的反饋脈沖用于各軸的精確定位,有效的避免了步進電機因為干擾失步造成的誤差。其中X軸與Y軸采用K3808G-1024BM-L5型編碼器,可靠性高,壽命長,抗干擾性能強,Z軸采用K8030J-1024BM-L5型編碼器,與XY軸編碼的區別在于增加了采用無鍵槽鎖緊環固定方式,安裝方便,可變孔徑。圖5為光電開關與編碼器的接線原理圖。

圖5 光電開關與編碼器的接線原理圖
4 結論
本文設計的四自由度點膠直角坐標機器人的精度高、效率好,并且能在整個三維空間自由可逆的運行,實現了自由靈活運動的要求,保障了整個點膠過程的精度。從整體來看,大量采用標準化的元器件,大大降低了成本,具有顯著的經濟性。此外,該設計實現了模塊化,各自由度自成體系,可以分別拆卸,便于更換與維修。相比于其他類似的機器人有很好的改進與優勢。
[1] 李剛,周文寶.直角坐標機器人簡述及其應用介紹[J].伺服控制,2008,(09):72-75.
[2] 徐起賀.滾動直線導軌副的特點、現狀及發展動向[J].機械制造,2001,(02):19-21.
[3] 王炎歡,陳阿三,劉鑫茂.直角坐標機器人控制系統的研制[J].輕工機械,2010,(04):67-69.
[4] 李團結.機器人技術[M].電子工業出版社,2009:10-11.
[5] 張志遠,李琪,畢海深.基于直角坐標機器人的軟袋再包裝自動上料系統[J].制造業自動化,2012,(06):11-14.
