大直徑對接管焊接機器人的結構設計與分析
2015-09-13 11:52:56李生保烏日圖謝振平康俊峰杜宏旺
制造業自動化 2015年17期
李生保,烏日圖,謝振平,康俊峰,杜宏旺
(1.內蒙古工業大學 機械學院,呼和浩特 010051;2.哈爾濱工程大學 自動化學院,哈爾濱 150001)
0 引言
管道對接是管道鋪設過程中一個重要的工序,它廣泛應用于的油氣、天然氣輸送管道等需要兩管對接的行業。鑒于現在大直徑管道焊接絕大多數還是采用傳統的手工焊接,工作效率低,工作進度慢,對人身傷害大,進而設計一種適合大直徑、全位置的焊接機器人對大直徑管道鋪設具有代表性的意義[1~3]。
1 焊接機器人組成介紹
焊接機器人采用了移動小車式,具有結構簡單、便于攜帶、靈活性好等特點,其三維實體模型如圖1所示,具有3個運動機構,分別是周向旋轉機構、軸向擺動機構和徑向伸縮機構。
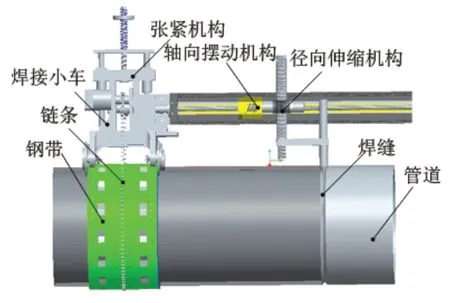
圖1 焊接機器人結構
周向旋轉機構主要由車體、鋼帶型軌道、主動鏈輪、鏈條和張緊機構等組成。周向旋轉機構采用齒輪鏈條機構,電機驅動主動齒輪旋轉,齒輪帶動鏈條,鏈條和鋼帶的摩擦力促使小車繞驅動方向的反方向運動。這里的鏈條的外鏈板具有齒鋸,從而增加了鏈條和鋼帶的摩擦度。
軸向擺動機構主要由滾珠絲杠、直線導軌、支架等組成。軸向擺動機構采用的是滾珠絲杠—直線導軌機構傳動機構,電機驅動滾珠絲桿,絲桿帶動絲母在直線導軌上沿軸向來回擺動。
徑向伸縮機構就是焊槍調整架的一部分,主要由齒輪、齒條、支架等組成。當電機驅動齒輪,齒輪帶動齒條徑向升降。
2 焊接機器人的結構設計
2.1 周向旋轉機構
周向旋轉機構是實現大管徑、全位置焊接,以及便于裝卸的關鍵內容。焊接小車是焊接機器人的主要承載體,其結構如圖2所示。

圖2 周向行走機構
2.2 軸向擺動機構
軸向擺動機構是使焊槍實現在焊道軸向擺動焊接的關節,其結構如圖3所示。
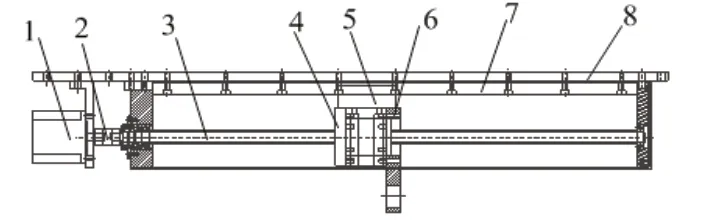
圖3 軸向擺動機構
2.3 徑向伸縮機構
徑向伸縮機構是使焊接機器人實現適應徑向高度(隨著焊道填充疊加)的關節,其結構因焊槍而選取,這里就不過多介紹。
3 運動學干涉分析
大直徑管對接焊接機器人的運動學干涉問題就是:當小車環繞管道作旋轉運動時,鏈條和小車車體可能存在干涉的問題。我們先用CAD作出管道和小車的幾何關系圖,如圖4所示;再找出鏈條和鋼帶以及和主動齒輪分度圓的接觸切點,也就是圖8里的C、D兩點;再測得小車車體和鏈條的垂直距離D。

圖4 小車與鏈條的位置示意圖
利用幾何法,得出OO3與R、?與OO3的關系:
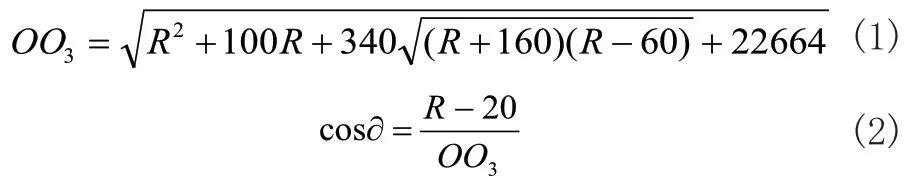
其中:R為管道的半徑,mm;
?為OD與OO3的夾角,rad;
OO3為焊道中心到主動鏈輪中的距離,mm。
由式(1)和式(2)得到?和R的關系式:

利用MATLAB擬合出?和R關系曲線,如圖5所示。
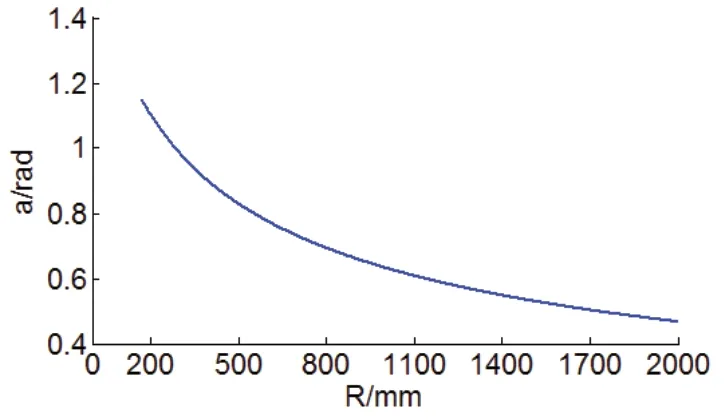
圖5 R和?的關系曲線
由圖6可知,R、?和D是一一對應的。這里我們可以通過CAD作圖,通過R和?確定出D的值,如表1所示。

表1 R、?和D之間的對應值
利用MATLAB擬合出R和D二者的關系曲線,如圖6所示。
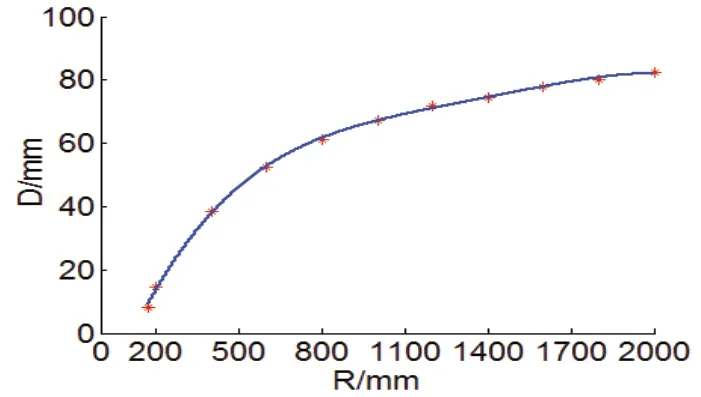
圖6 R和D二者的關系曲線
由圖7可以看出來:R值越大,D的值也就越大。當管道半徑取最小值(R=170mm)時,此時D>0。這就可以得出,無論R取任何值,D都大于0。從而可以得出,鏈條和小車不存在干涉。
4 運動學仿真
這里對管徑為400mm,管壁為10mm的圓形管道進行運動學仿真。設定小車的焊接速度為0.14rad/s,軸向擺動速度為0,從管道頂端順時針繞一周。利用Pro/E軟件對其進行運動學仿真,得到執行機構的位置軌跡和速度曲線,如圖7、圖8所示。
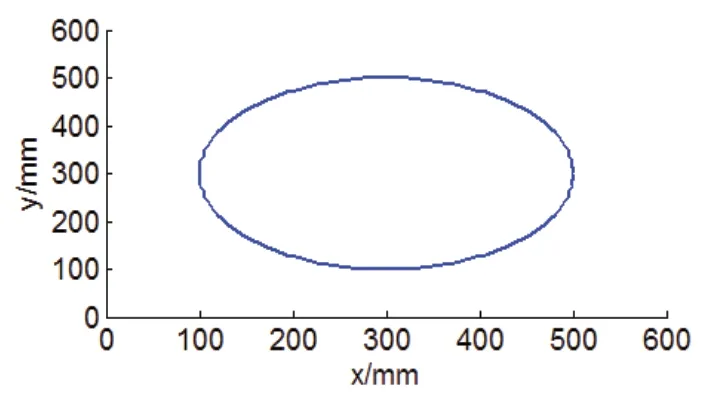
圖7 執行機構的位置軌跡
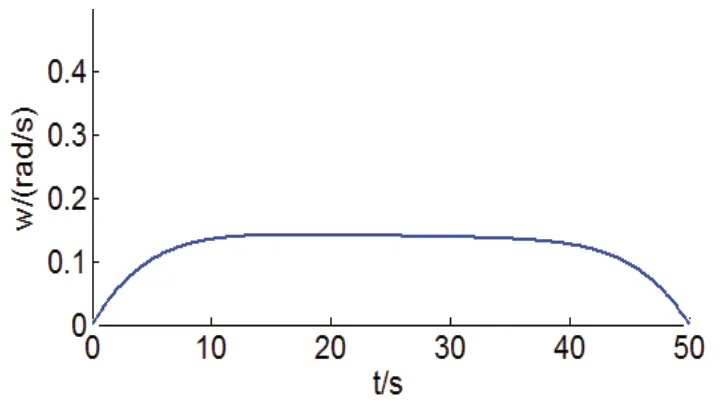
圖8 執行機構的速度曲線
圖7可以看出來,焊接機器人執行機構(焊槍)的位置軌跡與焊縫的軌跡相同;圖8可以看出,焊接速度起初是一個啟動過程,速度增大到0.14rad/s后,趨于穩定,當快到頂端時,開始減速,最后停止。
5 結論
對大直徑對接管焊接機器人進行了本體結構設計、運動學干涉分析、運動學仿真和位置仿真。通過上述分析,有利于對大直徑對接管焊接機器人的本體結構及運動學特性等深入了解,從而為大直徑對接管焊接機器人的生產與運動控制提供了理論依據。
[1] 楊俊偉,李巖.全位置自動焊接在管道建設中的應用[J].油氣儲運,2001,20(12):27-28.
[2] 張炯,張韶飛.焊接機器人設計時需要注意的問題[J].工業技術, 2014,(18):88
[3] 宋金虎.我國焊接機器人的應用與發展現狀[J].電焊機,2009, (04):18-21.
[4] 劉國慶,錢海東,于美美,等.一種便攜式智能管道切割機及方法:CN,201110052216.9[P].2012-09-05.
[5] 劉國慶,錢海東,黃雄榮,等.靈便式鏈條活結:CN,200920068543.1[P]. 2009-12-09.
[6] 蔡自興.機器人學[M].北京:清華大學出版社,2009.
[7] 濮良貴,紀名剛.機械設計[M].8版.北京:高等教育出版社,2006.
[8] 佟河亭,李超,王炳強.Pro/ENGINEER 4.0機構運動仿真與動力學分析[M].北京:人民郵電出版社,2009.
