電動飛機的鋰電池管理系統設計
2015-09-21 01:30:04張曉新
網絡安全與數據管理 2015年17期
林 峰,楊 棟,張曉新
(沈陽航空航天大學,遼寧 沈陽 110136)
0 引言
因舊式能源的污染問題及其儲藏量減少等因素,新式能源受到人們高度關注。鋰電池由于其容量大、壽命長、使用安全、綠色環保等優點在電動汽車上得到了廣泛的運用。有鑒于此,沈陽某實驗室研制了一種利用鋰電池的新型電動飛機。
但是由于鋰電池的電壓和容量很難做到非常大,所以只能把大量的鋰電池串聯起來使用。又由于鋰電池具有明顯的非線性、不一致性和時變特性,使其在長期充放電過程中由于各單體電池間充電接受能力、自放電率和容量衰減速率等的差異影響,容易造成組中電池之間的離散性加大,性能衰減加劇,嚴重情況下甚至會發生威脅安全的后果[1]。所以在電池充放電時,一定要注意對其進行均衡,而且放電時的穩定性尤為重要,否則電動飛機的安全性能將大幅降低。對于飛機來說,鋰電池與傳統燃料的最大區別就是鋰電池能量的不可預知性,鋰電池飛機不像使用航空煤油的飛機那樣可以精確地獲知里程,因此鋰電池飛機的飛行具有危險性。而BMS可以通過鋰電池的一些參數算出SOC,而僅僅知道SOC也無法解決飛機里程的問題。因為飛機在不同的飛行狀態下能量的消耗有著巨大的差別。所以不僅要顯示出SOC,還要提示駕駛員在各種不同的制動飛行狀態下飛機的續航時間。實際上飛機中電池的健康狀態(State of Health,SOH)比汽車中更加重要。一旦電池出現問題,必將導致重大事故。基于此上的種種原因,為了提高飛機安全性能引入電池管理系統是必不可少的。而在BMS中,為了獲得精確的SOC值,就必須測量鋰電池的某些參數如電池電壓、電池電流和電池溫度,所以精確的數據采集模塊是首要的。
1 數據采集模塊
1.1 電壓采集
該電動飛機為了獲得足夠的動能,把72塊電池串聯在一起供飛機使用。為了在電池充放電時不引起過充、過放和電池電量的不一致,就要了解每一塊電池的實時電壓,故而選用了電池管理芯片LTC6804,其可以一次測量12塊電池的電壓,且每塊LTC6804可以通過一個菊花鏈式結構連接在一起,所有電池電壓可以一次性全部測量,且測量誤差極小,一般在1.2 mV以下。單個LTC6804的電池電壓測量電路如圖1所示。
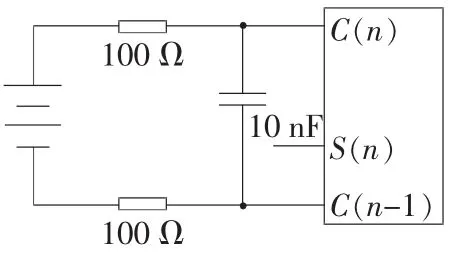
圖1 電壓采集
1.2 電流采集
LTC6804輔助ADC輸入(GPIO引腳)可用于任何模擬信號,包括那些來自產生兼容電壓的各種有源傳感器的信號。其中用于BMS的一個典型范例就是霍爾電流傳感器測量電流。LEM-dhab系列霍爾電流傳感器是由LEM公司應用霍爾效應原理開發的新一代電流傳感器,dhab系列傳感器最適用于測量直流、交流和脈沖電流,主要應用于大功率、低電壓的電路。原邊電路(大功率)和副邊電路(電子電路)之間采用電氣隔離設計。原理如下:該傳感器采用一個5 V電源供電,然后原邊電流在聚磁環處所產生的磁場通過一個次級線圈電流所產生的磁場進行補償,其副邊電流精確地反映原邊電流,LEM-dhab傳感器把副邊電流作為ADC輸入的GPIO1和GPIO2轉化為與電池輸入相同的轉換序列進行相同的數字化處理。
1.3 溫度采集
溫度對于電池的容量有著不小的影響,一般來說25℃~30℃環境下電池容量最大。所以為了解決溫度對SOC估計的影響,電池環境溫度是一個非常重要的因素。而且電池在過充和過放的時候,溫度可能會有比較劇烈的波動,所以電池管理系統必須對電池的實時溫度進行監控。LTC6804具有溫度采集功能,但實際上需要測量比其路數更多的信號,故增設一個多路復用(MUX)電路來支持更多的信號數目。電路如圖2所示。該電路可采用GPIO ADC對多達8個輸入源信號進行數字化處理,而MUX控制則由3個配置為I2C端口的GPIO線路提供。緩沖放大器可以幫助選定信號快速恢復穩定,以增加可用的轉換速率。
2 均衡模塊、通信模塊和微控制器
2.1 均衡模塊
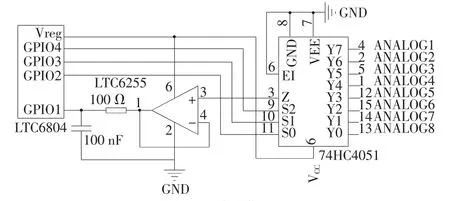
圖2 溫度采集
LTC6804采取控制內部MOSFET或外部MOSFET的方法來對電池組進行均衡。為獲得更大的放電電流,提高放電效率,通常采用外部均衡。如圖3所示,LTC6804利用S管腳內部的上拉電阻驅動外電路的P道溝MOSFET的柵極,從而使電量從高電壓電池轉移到低電壓電池,達到均衡的目的。
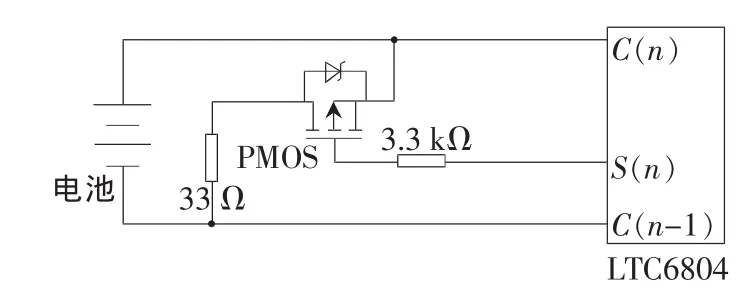
圖3 均衡電路
2.2 通信模塊
由于通信所用的數據類型及對可靠性的要求不盡相同,由多條總線構成的情況很多,線束的數量也隨之增加。為適應“減少線束的數量”、“通過多個LAN進行大量數據的高速通信”的需要,該系統使用控制器局域網絡 (Controller Area Network,CAN)。CAN總線能夠有效地應對采集數據數量大、種類多的特點。
2.3 微控制器
本文以Atmel公司生產的ATmega8單片機作為微控制器。ATmega8是一款采用低功耗CMOS工藝生產的基于AVR RISC結構的8位單片機。AVR單片機的核心是將32個工作寄存器和豐富的指令集聯結在一起,所有的工作寄存器都與ALU(算術邏輯單元)直接相連,實現了在一個時鐘周期內執行一條指令同時訪問 (讀寫)兩個獨立寄存器的操作。這種結構提高了代碼效率,使得大部分指令的執行時間僅為一個時鐘周期。因此,AT-mega8可以達到接近1 MIPS/MHz的性能,運行速度比普通CISC單片機高出10倍。
3 SOC測量原理
SOC是電池組的最主要的一個狀態參數,它直接顯示電池的剩余電量。所以有很多的學者對此進行研究。目前研究SOC的主要方法有:放電實驗法、安時積分法、開路電壓法、負載電壓法、電池內阻法、卡爾曼濾波法、神經網絡法[2]。這些方法都有其優缺點:放電實驗法是在實驗室中常溫條件下以恒定的電流放電,其優點是穩定可靠,缺點是需要大量時間,且不能用在工作的電池上;開路電壓法是在電池充分靜置后測量電池的開路電壓,其優點是計算SOC簡單易行,缺點是電池不能處于工作狀態中,無法在行駛的飛機上使用;安時積分法是把電池看成是一個黑匣子,不管其內部到底怎樣,簡單地認為其放出量等于其充入量,該方法的優點是測量簡單,可在線計算,缺點是無法計算初始值,且因其是積分的,所以其誤差也無法得到修正;負載電壓法是在電池工作時測量其電壓,其優點是能夠實時地估計SOC,缺點是飛機飛行狀態不同,其負載上的電壓會劇烈地波動,從而導致負載電壓法應用困難;電池內阻法是通過測量電池的內阻來獲知其SOC,其優點是在SOC較高或較低時相當準確,缺點是測量行駛飛機上電池的內阻比較困難,且不同批次電池的內阻差異較大;卡爾曼濾波法和神經網絡法是新型的測量方法,是系統的狀態做出最小方差意義上的最優估計,其優點是實時性好,能夠不停地修正誤差,缺點是對于鋰電池的模型精度和BMS統籌計算能力要求較高;神經網絡法是以計算機為基礎,通過模擬人腦的推理、設計、思考、學習等智能行為,解決和處理復雜問題,其優點是能夠模擬任何電池的動態特性,缺點是需要大量的參考數據進行訓練,估計誤差受訓練數據和訓練方法的影響很大。根據這些方法的優缺點,本文提出一種以開路電壓法來獲知電池的初始SOC,在這個基礎上對其進行以能量為核心的安時積分法,最后為了解決安時積分法帶來的誤差,采用卡爾曼濾波法通過充放電倍率、電池溫度、自放電損耗和電池循環次數等方法來對誤差進行修正。
4 軟件設計
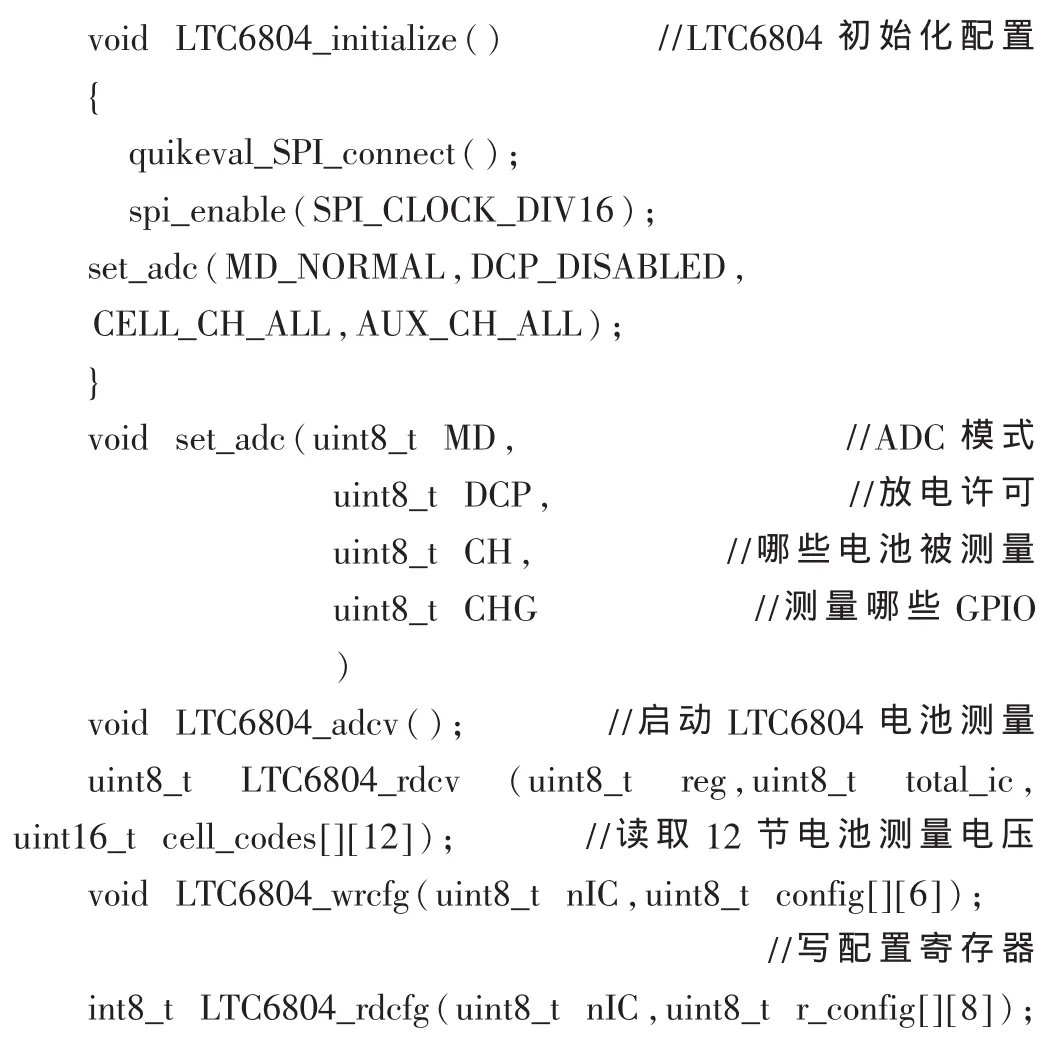
4.1 LTC6804的配置
在微控制器上電或復位后,首先通過SPI口初始化LTC6804,主要是設置 SPI的通信速率、LTC6804的ADC工作模式。根據其讀、寫時序可以寫出LTC6804的配置程序,程序如下:

4.2 電流采集程序設計
霍爾電流傳感器通過作為ADC輸入的GPIO1和GPIO2把信號在與電池輸入相同的轉換序列中進行數字化處理,從而達到與電壓同步的效果。然后數據轉化為二進制數存在輔助寄存器A中,從寄存器中讀出來的數據共 16位,記為 DATA1,G1V為 GPIO1的電壓,I為被測電流。計算公式如下:

4.3 總體程序設計
如圖4所示,首先對各個模塊進行初始化,測量電池的電壓、電流和溫度。然后根據測得的數據進行SOC的估算,并對電池所處狀態進行分析、顯示。最后通過總線傳到上一級,完成對電池組的監控。
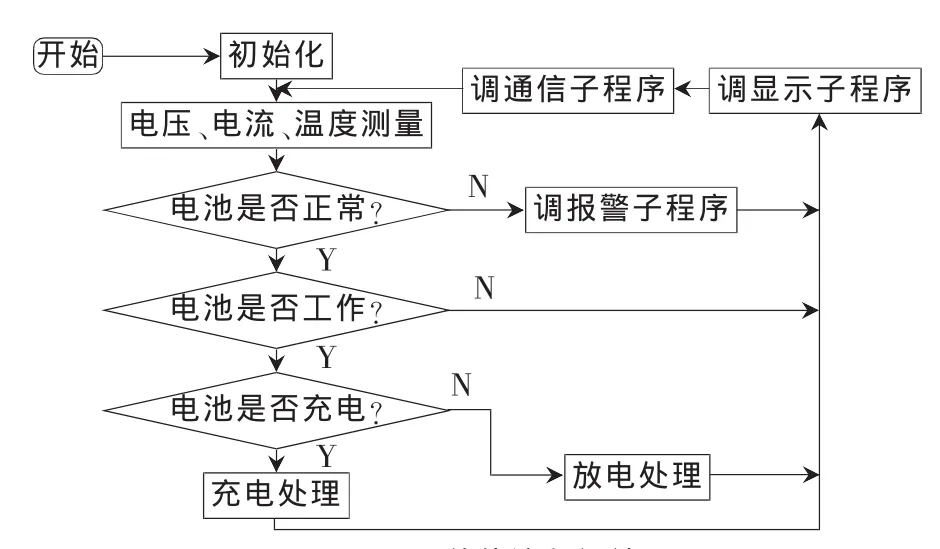
圖4 總體流程設計
5 數據與分析
本文采用麥格納公司為電動汽車生產的大容量的鋰電池作為測量載體,采用安捷倫公司生產的34970A數據采集器作為輔助測量儀器。表1是電池測量的一些數據。
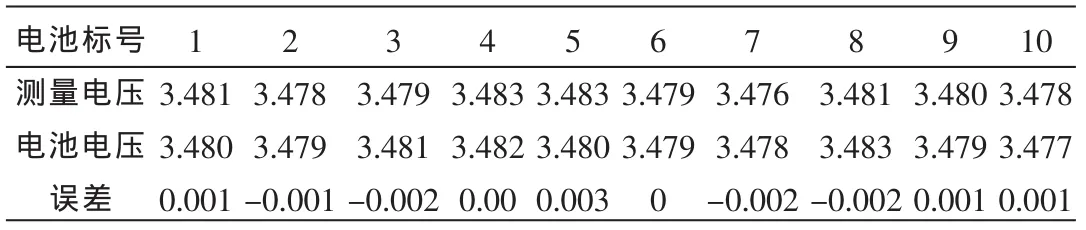
表1 電池測量數據
由上表數據可知,LTC6804的測量誤差小于0.05%,符合設計需求,由圖5可知電池在電壓范圍3.0 V~3.5 V之間儲能極少,且電動飛機飛行時所需動能極大,故可推測出電池電壓達到3.5 V時會急劇下降,所以本文將SOC的初始值預設為3.5 V,并且利用高斯擬合得出一個開路電壓的公式 0.96×exp(-((volt-1.58)/0.81)2)+0.5×exp(-((volt-0.48)/0.66)2):經計算得知此公式誤差約為0.8%,可以使用。由圖6(a)可知電池在充電時充入35 kW/10 s能量,放電時放出32.4 kW/10 s能量,可以推測出電池損耗約為 7.5%。由圖6(b)可知,電池在常溫下放出22 kW/10 s能量,-20℃時放出15 kW/10 s能量,可以推測出溫度對電池影響極大,約為32%。由圖6(c)可知,電池在-20℃時放出 15 kW/10S能量,而這時卻充入約23.9 kW/10S能量,影響約為38%,基本上等于電池損耗和溫度損耗之和。由圖6(d)可知,電池在充電時充入39.2 kW/10S能量,然后放置了約50天,放電時放出37.8 kW/10S能量,可以得知此次損耗約為9.5%。除去原來得知的電池7.5%的損耗,電池在50天的自損約為2%。
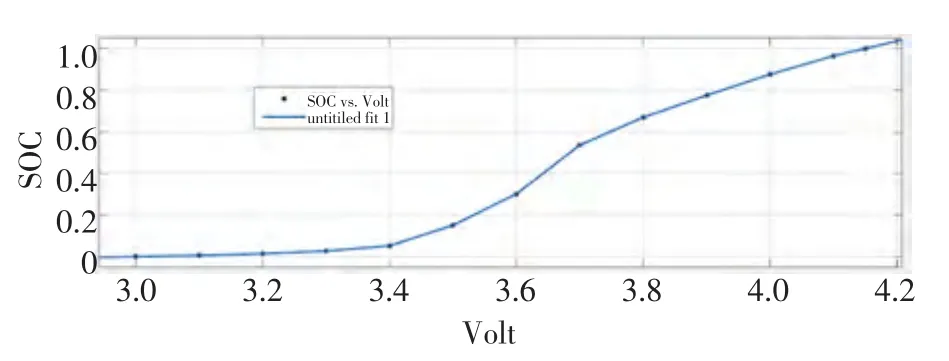
圖5 電壓—SOC曲線
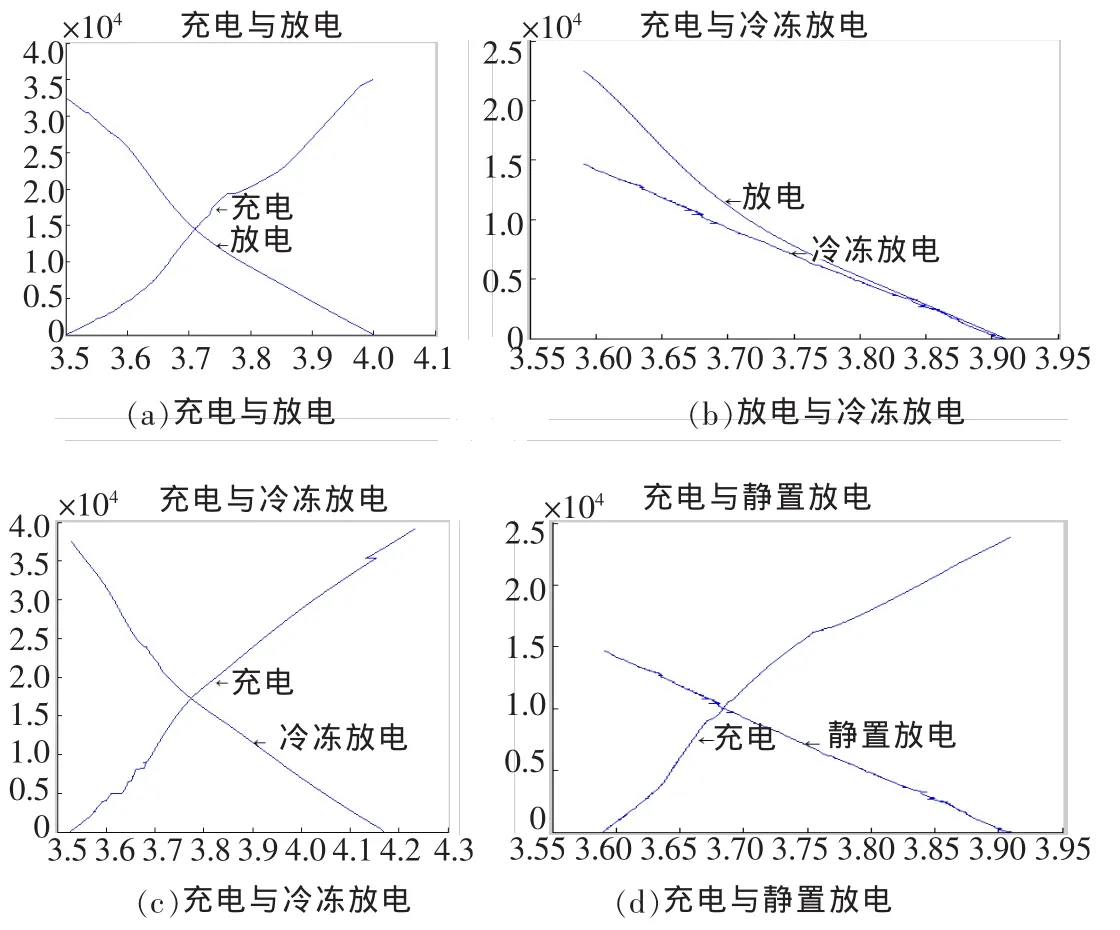
圖6 各種情況與放電的比較
6 結論
本文采用ATmega8來控制信號和計算數據,利用高精度采集芯片LTC6804采集電壓、電路、溫度等信號,通過實驗等到的結果來對電池當前環境進行調整,使精度進一步提高;然后分析飛機處于哪種飛行狀態,這樣就可以提示飛機在當前狀態的準確飛行時間。經過實踐表明,該系統穩定可靠,具有使用價值。
[1]ARAI J,YAMAUCHI S.Development of a high power lithium secondary battery for hybrid electricvehicles[J].Journal of Power Sources,2005,146(1-2):788-792.
[2]麻友良,陳全世,齊占寧.電動汽車用電池 SOC定義與檢測方法 [J].清華大學學報:自然科學版,2001,41(11):27-35.
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年11期)2019-06-24 03:40:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04