基于CAN總線的車載稱重系統的仿真開發及實現
2015-09-23 10:49:16柳東亮符丹丹陜西重型汽車有限公司陜西西安710200
汽車實用技術 2015年12期
柳東亮,符丹丹(陜西重型汽車有限公司,陜西 西安 710200)
基于CAN總線的車載稱重系統的仿真開發及實現
柳東亮,符丹丹
(陜西重型汽車有限公司,陜西 西安 710200)
文章所介紹的車載稱重系統用于重型卡車,采用CAN總線模塊,符合SAE J1939協議,在前期的開發過程中,為了驗證開發效果,使用CANoe軟件,采用CAPL語言,實現功能仿真,創建Panel界面,觀察仿真結果穩定,并能滿足初期設計要求。
CANoe;仿真;CAPL;車載稱重系統
10.16638/j.cnki.1671-7988.2015.12.023
CLC NO.: U463.9Document Code: AArticle ID: 1671-7988(2015)12-65-02
引言
隨著我國市場經濟的發展,公路交通量迅速發展,重型卡車的使用量逐年增長,部分運輸單位或個人不顧車輛及道路的承載能力,行車安全意識薄弱,擅自增加車輛欄板,嚴重超載,對車輛本身及公路都造成了嚴重的損害。因此,為了維護國家的財產安全及行車安全,嚴格限制車輛超載已迫在眉睫。車載稱重系統已廣泛應用于載貨車,本文介紹的車載稱重系統,可以在行車過程中自動測量整車重量,根據用戶的使用需求,可自主選擇是否需要顯示重量。
1、系統介紹
車橋的變化量,控制器采用飛思卡爾MCU,具有CAN信號收發功能,采集傳感器的信號和整車信號進行處理,輸出貨物重量 CAN信號給整車,顯示系統可以使用整車儀表,也可以使用其他顯示屏,顯示系統要求必須具有CAN信號收發功能。

圖1 系統組成
2、系統方案設計
2.1傳感器的選擇和安裝方案
當在車廂內裝載貨物時,車軸和車橋受力發生變形,這種變形會隨貨物重量的增大而增大,并呈一一對應的關系。總體技術方案的原理就是:基于這種一一對應的關系,選擇
本系統主要包含三部分,傳感器、控制器和顯示系統,如圖1所示。傳感器采用應變片式傳感器,每個車橋上安裝兩個傳感器,以6×4載貨車為例,需安裝6個傳感器來檢測應變式電阻傳感器,該傳感器由電阻應變片和彈性敏感元件組成,工作原理:將應變片粘貼在各種彈性敏感元件上,當彈性敏感元件感受到外力、位移、加速度等參數的作用時,彈性敏感元件產生應變、再通過粘貼在上面的電阻應變片將其轉換成電阻的變化[1],傳感器測量電路如圖2所示:
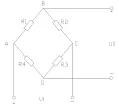
圖2 電阻傳感器測量電路
通過實驗所得,需在圖3、圖4所示位置安裝傳感器,通過測量車軸和車橋的變形來求得所裝載的貨物質量。
2.2控制器數據處理

圖3 車軸安裝位置

圖4 車橋安裝位置
以前軸為例具體說明工作原理[2],傳感器分別測量如圖4所示的P1與P2、P3與P4的在垂直方向的相對變形,并將這種變形通過傳感器和控制器轉變為數字信號 ni(i=1、2、3……),通過標定和計算的方式找出各傳感器輸出信號ni(i=1、2、3……)與貨物質量W貨之間的關系,即確定各傳感器的分配系數si(i=1、2、3……),用下列算式計算貨物總質量:

通過標定采得的數據進行數據處理求得分配系統S。
由于傳感器靈敏度較高,在行車和停車狀態下,傳感器的變化量較大,所以控制器需要接收整車的車速信號、轉速等信號進行動靜態區分,需采用不同的濾波深度進行信號處理。控制器將處理完的貨物重量數據按照 CAN信號定義發送至CAN總線。
控制器可以做一些報警信號:貨物丟失報警,當在行車過程中,突然出現貨物重量變小,發送總線報警信號,接收設備接收后提示司機貨物丟失;傳感器檢測的是橋的應變量,當橋的應變量變化超過橋正常的應變量時,及時發送報警信號,提示司機注意安全;該系統通過與網絡后臺通訊,可以實時記錄車輛的運輸狀況,方便進行車隊管理。
2.3顯示系統
顯示系統必須具有 CAN總線收發功能,可以接收控制器發送的CAN信號,通過液晶顯示貨物重量,當重量超過設定值時可以進行聲光報警。也可通過遠程終端將數據傳遞至網絡后臺進行監控[3]。
由于傳感器存在溫漂、零點漂移等問題,所以需設置一個按鍵進行置零操作,建議將該按鍵放于儀表上,稱重控制器內部標定一個參數,在該數字范圍內可以進行置零操作,點擊稱重置零操作,儀表通過CAN線發送置零操作給控制器,控制器接收后根據內部標定的數字判斷是否可以進行置零操作,置零操作成功發送反饋信號儀表顯示“置零操作成功”,如不能操作也通過CAN線發送給儀表,儀表顯示“置零失敗”。
3、系統仿真驗證
由于傳感器采集的數據有很多隨機信號,隨機信號可以認為是一個靜態信號與諸多不同頻率、不同幅值的正弦信號疊加的結果。該靜態信號就是車輛靜態時對應于裝載貨物的信號。獲取靜態信號的方法如下:對6個傳感器原始信號進行傅里葉變化,將時域信號轉變為頻域信號;采用低通濾波的方法得到靜態信號;以此信號作為穩態信號,稱重數值為處理后數據后求和的數值[4]。 現對實際采集的數據進行仿真驗證如圖5所示:

圖5 數據處理前后對比
4、系統實現
將該套系統裝與6×4自卸車,標定完成后將分配系數刷寫至控制器,然后對車輛裝沙后進行實際稱重,重量顯示見圖6∶35690kg,整車重量為16350kg,磅秤稱得實際裝沙量為19340kg,車載稱重系統顯示19004kg,相對誤差1.7%。

圖6 磅秤顯示
5、結束語
基于CAN總線的車載稱重系統,通過仿真驗證和實際試驗驗證,該系統的設計方案可行,且在行車和停車全過程中,誤差均可保持在3% 以內,滿足設計要求,可以有效的監測到超重,運行中貨物丟失等問題。
[1] 余成波.傳感器與自動化監測技術[M].北京:高等教育出版社, 2004.
[2] 李朝青.單片機原理與接口技術[M].北京:北京航空航天大學出版社,1994.
[3] 何立民.單片機應用程序設計技術[M].北京:北京航空航天大學出版社,2002.
[4] 吳哲輝.算法設計與分析[M].北京:煤炭工業出版社,1993.
The On-board Weighing System Based On CAN Bus Simulation Development
and Implementation
Liu Dongliang, Fu Dandan
( Shaanxi Heavy-Duty Automobile Co., Ltd., Shaanxi Xi'an 710200 )
In this paper, the vehicle weighing system is used for heavy duty truck, use CAN bus module, SAE J1939 protocol. In order to validate the development effect, use CANoe software, use CAPL language, realize the function simulation, create Panel interface, observe the simulation results and meet the requirements of the initial design.
CANoe; simulation; CAPL; automatic weighing system
U463.9
A
1671-7988(2015)12-65-02
柳東亮,就職于陜西重型汽車有限公司。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
