盲人智能過街輔助系統設計
2015-10-08 11:06:49王少華等
科技視界 2015年27期
王少華等

【摘 要】介紹了基于飛思卡爾K60單片機的盲人智能過街輔助系統。在詳細分析盲人過街需求的基礎上,采用IAR6.3開發平臺進行程序設計,基于飛思卡爾K60芯片設計硬件模塊,進行超聲波和紅外測障測距,通過OV7725鷹眼攝像頭實現斑馬線視頻圖像采集。實驗室試驗結果表明,該系統能夠保證盲人走在斑馬線中間區域并可避免與障礙物相撞,可有效應用于盲人過街輔助。
【關鍵詞】盲人;過街;輔助系統;飛思卡爾K60
【Abstract】This paper introduces an intelligent intersection crossing assist system for The Blind based on Freescale K60.On the basis of a detailed analysis of the needs of the blind man when they across the street, it use IAR6.3 development platform for programming, design based on hardware module based on Freescale K60 chip,detects whether there exist obstacles within a distance in front by means of ultrasonic and infrared and achieve zebra video image by OV7725 Hawkeye camera. The Laboratory test results show that the system could ensure that blind people can walk on the center of zebra and avoid obstacles, will be helpful to assist blind people to across the street.
【Key words】The blind; Intersection crossing; Assist system; Freescale K60
0 前言
根據世界衛生組織( WHO) 和2006年中國第二次殘疾人調查資料統計數據顯示,中國約有1233萬盲人,是全世界盲人最多的國家,占整個世界盲人數的20%[1],并且以每年45萬的速度增加。因視力問題無法看清道路、交通標志標線和障礙物,在加上國內部分地區盲道占用、盲道設計不合理現象較為普遍突出,這都給盲人出行造成了極大的困難。隨著社會經濟的發展,如何為這一特殊群體服務,保障其日常交通出行便利,體現了整個社會對殘障人士的關愛與溫情。
為此,國家自2002年起,北京、天津、上海等12個城市被國務院命名為全國無障礙設施建設示范城市。深圳市輪翼天使網絡科技有限公司開發了用于無障礙設施查詢的手機應用easy-Go。新疆大學的王冠生[1]等人重點介紹了電子式行進輔具、移動式導盲機器人、智能盲杖以及智能導盲系統等輔具的歷史發展應用現狀,并指出了發展趨勢。成都理工大學的王小偉采用DSP+MCU的雙CPU體系結構方案,實現了GSM短信收發、GPS定位、盲道識別等功能[2]。中北大學的趙曉東進行了超聲波導盲杖的設計[3]。天津大學的曹玉珍等建立了基于圖像的導盲輔助設備中道路斑馬線的識別方法[4]。鄭州大學的邱晶晶進行了紅綠燈電路模塊、盲道和斑馬線的識別[5]。
本文建立了一個盲人智能過街輔助系統。在詳細分析盲人過街需求的基礎上,采用IAR6.3開發平臺進行程序設計,基于飛思卡爾K60芯片設計硬件模塊進行超聲波和紅外測距,進而測出障礙物的高度。通過OV7725鷹眼攝像頭實現斑馬線視頻圖像采集,確保盲人行走在中線附近的安全區域中[6]。
1 盲人過街系統硬件設計
在眾多的導盲輔助工具中,使用最廣泛的是導盲手杖,在上面集成一組傳感器小型控制計算機等,有的甚至裝有導輪移動平臺,具有一定智能性,考慮到出行的便利性,結合天津市盲人協會調研,在保持盲人便利性基礎上,采用了手推車的設計方案,通過紅外和光電傳感器的高低布置,來探測前方是否有障礙物以及障礙物的高度,通過視頻圖像檢測斑馬線并保證盲人走在斑馬線中間,具體應用到的硬件設備有:
1.1 飛思卡爾K60單片機
本系統采用的是飛思卡爾公司Kinetis系列的MK60DN512ZVLQ10單片機。該款單片機主頻高達100MHz,有多個可編程定時器,可捕捉多路通道信號。支持所有串行時鐘格式和采樣模式中斷控制器性能良好,且中斷的響應延時為5個周期,并且同時最多可以有5個外部中斷,7個可編程的優先級,5個處理器異常。該芯片尺寸較小,僅為5cm×4cm,低功耗的高速閃存技術,全靜態的設計,3.3v的工作電壓,低功耗。
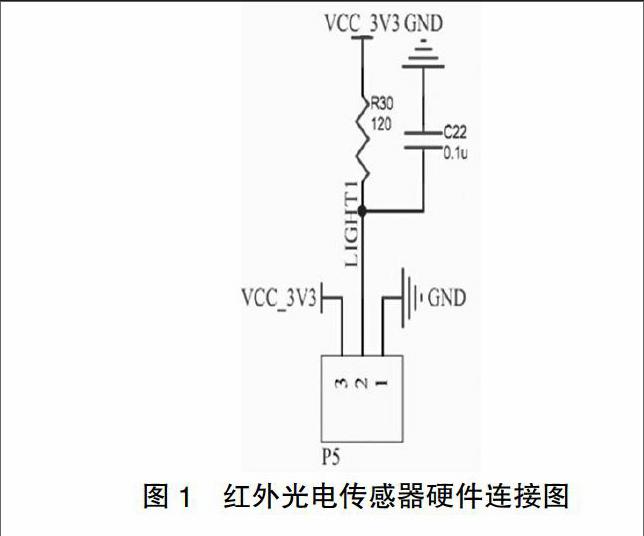
1.2 紅外光電傳感器
紅外線光電開關(光電傳感器)屬于光電接近開關的簡稱,它是利用被檢測物體對紅外光束的遮光或反射,由同步回路選通而檢測物體的有無,其物體不限于金屬,對所有能反射光線的物體均可檢測。漫反射式光電開關是一種集發射器和接收器于一體的傳感器,光電開關將輸入電流在發射器上轉換為光信號射出,接收器再根據接收到的光線的強弱或有無對目標物體進行探測。當有被檢測物體經過時,將光電開關發射器發射的足夠量的光線反射到接收器,于是光電開關就產生了開關信號,根據輸入信號的高低電平即可判斷前方是否存在障礙物。本系統采用的是E18-D80NK 紅外光電傳感器。
1.3 超聲波傳感器
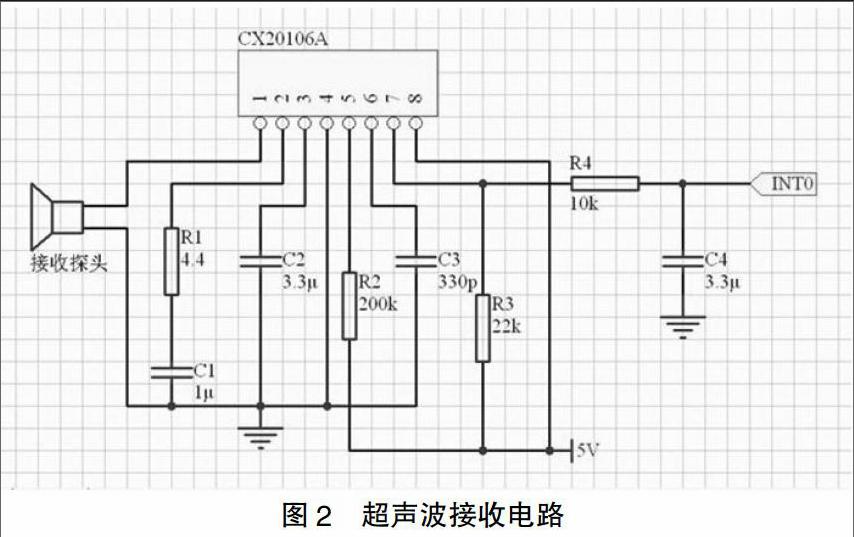
超聲波傳感器是利用超聲波的特性研制而成的傳感器。超聲波是一種振動頻率高于聲波的機械波,由換能晶片在電壓的激勵下發生振動產生的,它具有頻率高、波長短、繞射現象小,特別是方向性好、能夠成為射線而定向傳播等特點。采用如圖2所示KS103超聲波測距模塊,其具體功能如下:
含實時溫度補償的距離探測,高探測精度;
探測范圍1cm~800cm及1cm~1000cm;
探測頻率達500Hz,即每秒可探測500次;
使用I2C/串口接口與主機通信,自動響應主機的I2C/串口控制指令;
5s未收到I2C控制指令自動進入uA級休眠,并可隨時被主機I2C控制指令喚醒;
寬工作電壓范圍 (3.0V~5.5V)。
1.4 鷹眼攝像頭
本系統采用以OV7725鷹眼攝像頭。攝像頭為30萬像素,驅動電壓為3.3V,12M有源晶振,384KB的FIFO AL422B,焦距3.6mm,光圈F2.0,視角92°,價格便宜,并且方便信號處理,在模塊電路板上可直接集成硬件二值化電路,輸出的二值化圖像清晰,同時噪聲較少。視頻圖像采集的流程為:
(1)需要采集圖像時,開場中斷。
(2)場中斷來了,開行中斷和初始化DMA傳輸。
(3)行中斷來了便設置DMA地址,啟動DMA傳輸。過濾掉前面幾行和較遠處幾行不采集。
(4)每個PCLK上升沿來了都觸發DMA中斷,將攝像頭輸出的值讀取到內存數組里面。
(5)當觸發80次(80=圖像列數目)后就停止DMA 傳輸。
(6)行中斷次數等于一幅圖像的行數。采集完成后便關閉行中斷和場中斷。
2 盲人過街系統軟件設計
2.1 超聲波傳感器軟件設計
該模塊使用方法簡單, 控制單片機一個端口發出一個10us以上的高電平,就可以在接收端口等待高電平輸出.一有輸出就打開定時器計時,所計時間就是超聲波從發射到返回的時間,如此不斷的周期檢測,就可實時測量盲人距前方障礙物距離。紅外模塊軟件設計與此類似。
while(!gpio_get(PTA2)); //等待高電平出現
pit_time_start(PIT0);//開始計時高電平持續時間
while(gpio_get(PTA2));
timevar = pit_time_get_us(PIT0);
printf("\n\n本次時間為:%dus",timevar);
temp = timevar; //獲取計時時間
pit_close(PIT0); //開始計時
temp = temp/10;//ms
temp=temp*170;//340m/s *t[s] /2 = distance m
2.2 視頻圖像模塊算法設計
首先識別斑馬線跳變沿,通過識別跳變沿確定斑馬線的左右邊側位置。通過從左到右的方式識別中線,如果中心點坐標在25-55之間則認為是在中間,否則就是在兩側。圖像中黑色的數值為0,白色為255,假設第i點的二值化值為image[i],第i+1的為image[i+1],因此如果image[i]> image[i+1],則認為識別到了右邊側;反之則為左邊側。
其次通過確定斑馬線中線,確定安全區域。將左邊側和右邊側的坐標值求和之后除以2即得中心點的坐標,然后通過計算整個圖像的有效中心點。將最上邊和最下邊的點的坐標進行比較,如果兩者之間的差距小于6的話,則認為是個直線,否則是個斜線。如果是直線的話,有效的中點值與25和55進行比較,通過比較識別出直線在整個視頻圖像中的位置。如果是斜線的話,通過識別將最上邊和最下邊的值與中間值進行比較得出中線具體是在圖形的那個位置。如果最上邊的值小于最下邊的值,則為偏向左側的斜線。否則則是偏向右邊的斜線。由圖可知當前方向是偏向右邊的。最后根據偏向予以語音提醒。
3 結語
為了輔助盲人過街,十分有必要對斑馬線和道路障礙物進行實時監測。本文設計了一種基于飛思卡爾K60的智能盲人過街輔助系統,結果表明,該系統各模塊工作正常,能夠有效監測障礙物距離,識別障礙物高度是否高于傳感器設置高度,同時,完成了初步的斑馬線中線和安全區域監測。但本系統只完成了理想條件下的實驗室圖像處理工作,還有待于進行不同傳感器的數據融合算法設計,以及室外斑馬線實測,才能真正為盲人出行提供輔助。
【參考文獻】
[1]王冠生,鄭江華,瓦哈甫·哈力克,張洋,姚聚慧.盲人導航路徑誘導輔具研究與應用綜述[J].計算機應用軟件,2012,29(12):147-151.
[2]王小偉.基于RFID的盲道識別系統設計[D].成都:成都理工大學,2009.
[3]趙曉東.超聲波導盲杖的設計[J].山西電子技術,2011(5):19-21.
[4]曹玉珍,劉剛,楊海峰.導盲系統中的道路斑馬線識別方法[J].計算機工程與應用,2008,44(15):177-178.
[5]邱晶晶.多功能導盲裝置的若干問題研究[D].鄭州:鄭州大學,2010.
[6]劉延霞,谷林柱.基于單片機的盲人避障裝置的設計[J].軟件,2011,32(3):101-104.
[責任編輯:湯靜]
