民用飛機(jī)起落架擺振分析與仿真
2015-10-08 12:13:09馬建常正
科技視界 2015年27期
馬建 常正
【摘 要】本文總結(jié)了國(guó)內(nèi)外在起落架擺振穩(wěn)定性分析與擺振仿真課題的研究現(xiàn)狀。建立了大型民用飛機(jī)前起落架擺振分析的數(shù)學(xué)模型,應(yīng)用MATLAB軟件編制了前輪擺振穩(wěn)定性分析程序,并且采用待定復(fù)參數(shù)方法進(jìn)行了分析計(jì)算。應(yīng)用Virtual Lab軟件建立了前起落架擺振仿真分析模型,采用某型飛機(jī)和起落架參數(shù),進(jìn)行仿真分析,對(duì)起落架擺振試飛有一定的指導(dǎo)和應(yīng)用價(jià)值。
【關(guān)鍵詞】民用飛機(jī);起落架;擺振;穩(wěn)定性分析;阻尼
【Abstract】The research status of shimmy stability analysis and simulation of landing gear both here and abroad are summarized in this paper. The shimmy analysis model of civil aircraft nose landing gear is established, and the nose landing gear shimmy stability analysis program is compiled using MATLAB software the calculation is performed using the method of indeterminate complex number coefficient. Further more, the nose landing gear shimmy simulation model is established using the software Virtual Lab, and performed the simulation analysis using a certain aircraft parameter. These methods have been of great value of the guidance, practicality in the related programs.
【Key words】Airliner; Landing gear; Shimmy; Stability analysis; Damp
0 引言
現(xiàn)代民用大型飛機(jī)廣泛使用前三點(diǎn)式起落架,前三點(diǎn)式起落架在起飛、著陸和滑跑中具有許多優(yōu)點(diǎn),但是它也存在若干問(wèn)題,前輪擺振就是一個(gè)突出的問(wèn)題,現(xiàn)已成為飛機(jī)結(jié)構(gòu)動(dòng)力學(xué)問(wèn)題的主要研究課題之一。在前三點(diǎn)式起落架大型客機(jī)中,機(jī)身的偏航剛體運(yùn)動(dòng)、彈性振動(dòng)及跑道的激勵(lì),對(duì)前起形成耦合激勵(lì)影響顯著,抗機(jī)身和地面擾動(dòng)能力比主起落架差,因此對(duì)起落架的擺振分析一般只分析前起落架。
前輪擺振是飛機(jī)在一定的滑跑速度下,前起落架上發(fā)生一種由于輪胎繞定向軸轉(zhuǎn)動(dòng)和接觸地面部分變形而引起的自激勵(lì)振動(dòng)現(xiàn)象,其涉及的影響因素很多,是一個(gè)多參數(shù)協(xié)調(diào)的結(jié)果。引起擺振的主要擾動(dòng)包括:在側(cè)風(fēng)中偏航著陸,在滑跑時(shí)受到跑道側(cè)向激勵(lì),前輪未處于中立位置時(shí)觸地,對(duì)飛機(jī)進(jìn)行操縱轉(zhuǎn)彎或糾正航向時(shí)機(jī)輪滾轉(zhuǎn)動(dòng)不平衡等等[1]。發(fā)生擺振時(shí),會(huì)引起機(jī)身的劇烈抖動(dòng),嚴(yán)重影響駕駛員的正常操縱,甚至引起機(jī)身部件和起落架結(jié)構(gòu)的破壞或事故的發(fā)生,因此前輪擺振是一種非常有害的自激振動(dòng),必須加以防止[2]。
1 國(guó)內(nèi)外研究現(xiàn)狀
在20世紀(jì)40~60年代,國(guó)外大批的專家和學(xué)者參與了擺振的分析和實(shí)驗(yàn)研究工作,做出了許多貢獻(xiàn)。主要有:Moreland、Carbon、Smiley、Stevens、Pacejka、von Schlippe、Collins等。根據(jù)對(duì)不同的輪胎變形假設(shè),將輪胎力學(xué)模型區(qū)分為點(diǎn)接觸理論和張線理論。同時(shí),根據(jù)擺振穩(wěn)定性分析方法的不同,將擺振分析分為線性擺振分析和非線性擺振分析[3-4]。在擺振仿真領(lǐng)域,F(xiàn)ong, A. 和Eng, P. 利用多體系統(tǒng)動(dòng)力學(xué)仿真軟件ADAMS研究了飛機(jī)起落架系統(tǒng)的擺振問(wèn)題[5];Chris Hetreed 應(yīng)用多體動(dòng)力學(xué)軟件MSC.ADAMS/AIRCRAFT模塊對(duì)飛機(jī)前輪擺振進(jìn)行了仿真研究[6]。
國(guó)內(nèi)的擺振分析工作從六十年代開(kāi)始,引進(jìn)、吸收和發(fā)展了國(guó)外擺振分析方法和技術(shù)。其中擺振分析的代表著作為諸德培等人編著的《擺振理論及防擺措施》,它基本反映了國(guó)外七十年代及國(guó)內(nèi)的擺振分析現(xiàn)狀[1]。此后,王學(xué)軍、周進(jìn)雄、向錦武和盧京明等人分別對(duì)擺振分析模型的建立,線性分析和非線性分析,以及起落架參數(shù)對(duì)擺振的影響進(jìn)行了研究,并分別應(yīng)用Fortran和Matlab語(yǔ)言編制了擺振穩(wěn)定性分析程序[7-10]。
2 前輪擺振計(jì)算分析
前輪擺振主要分為“輪胎型”擺振和“結(jié)構(gòu)型”擺振兩種。發(fā)生“輪胎型”擺振時(shí)的減擺器阻尼臨界值和發(fā)生“結(jié)構(gòu)型”擺振時(shí)的減擺器阻尼臨界值分別設(shè)為減擺器設(shè)計(jì)阻尼的上、下臨界值。
在擺振穩(wěn)定性分析中主要包括線性分析和非線性分析兩種。為了更正確地描述擺振運(yùn)動(dòng),或研究穩(wěn)定邊界附近的情況時(shí),需要應(yīng)用非線性理論,來(lái)進(jìn)行擺振分析。而在實(shí)際的工程應(yīng)用中,或者進(jìn)行前期的擺振分析時(shí),為了判斷擺振穩(wěn)定性,考慮到在實(shí)際設(shè)計(jì)中都有足夠的穩(wěn)定儲(chǔ)備度,應(yīng)用線性理論就足夠了,本文即應(yīng)用線性理論進(jìn)行擺振穩(wěn)定性分析。
2.1 前輪擺振模型建立
現(xiàn)代大型民用客機(jī)如波音737和空客A320前起落架一般采用單支柱,雙輪結(jié)構(gòu)形式,其主要由油-氣式緩沖支柱、機(jī)輪、阻力桿、上、下防扭臂、鎖機(jī)構(gòu)、轉(zhuǎn)彎?rùn)C(jī)構(gòu)、收放作動(dòng)筒和解鎖作動(dòng)筒組成,其中前起落架雙輪多采用不聯(lián)動(dòng)形式。
在擺振分析中,忽略對(duì)擺振影響很小的結(jié)構(gòu),將實(shí)際的前起落架系統(tǒng)簡(jiǎn)化為慣性元件、彈簧元件和阻尼元件,即簡(jiǎn)化為帶有減擺阻尼的集中質(zhì)量框架系統(tǒng)。建立前輪擺振穩(wěn)定性分析模型時(shí),做了如下的假設(shè):(1)假設(shè)飛機(jī)滑跑速度V為常數(shù);(2)假設(shè)前輪的垂直載荷是恒定的,不考慮飛機(jī)垂直方向的運(yùn)動(dòng);(3)假設(shè)輪胎在滾動(dòng)時(shí)沒(méi)有滑移。
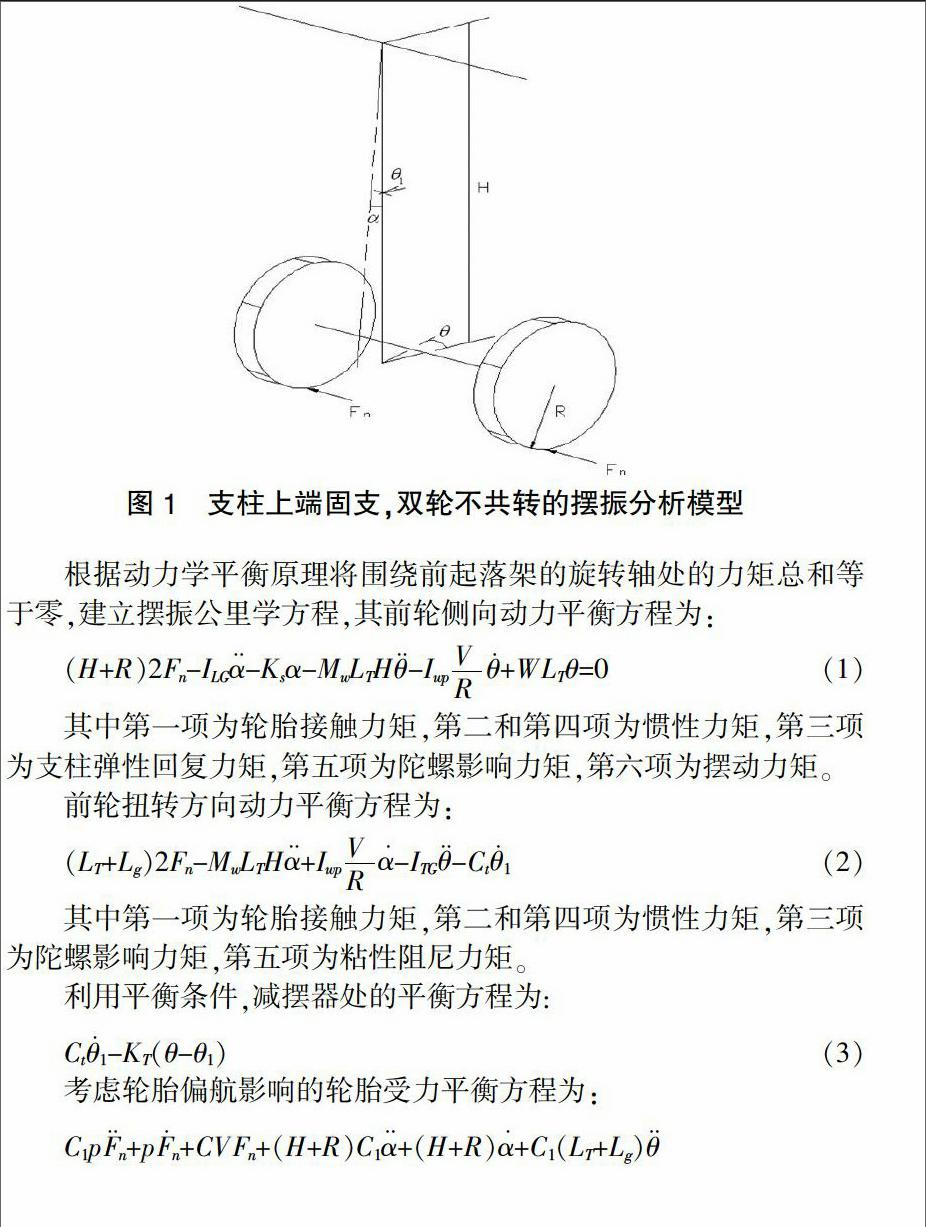
在前輪擺振分析中,假設(shè)前起落架支柱上端固支、忽略機(jī)身對(duì)前輪的側(cè)向運(yùn)動(dòng)的影響。作用在前輪上的力矩包括慣性力矩、陀螺力矩、彈性恢復(fù)力矩以及外部作用力矩,簡(jiǎn)化模型如圖1所示。
根據(jù)動(dòng)力學(xué)平衡原理將圍繞前起落架的旋轉(zhuǎn)軸處的力矩總和等于零,建立擺振公里學(xué)方程,其前輪側(cè)向動(dòng)力平衡方程為:
將方程(1)、(2)、(3)和(4)組合在一起就形成了一組完整的支柱上端固支、雙輪不共轉(zhuǎn)的前輪擺振穩(wěn)定性分析方程組。方程組共由4個(gè)自由度用于描述前輪的擺振運(yùn)動(dòng),分別為:α(起落架側(cè)向擺角)、θ(起落架輪軸處扭轉(zhuǎn)角)、θ1(起落架減擺器處扭轉(zhuǎn)角)和Fn(地面對(duì)單個(gè)輪胎的側(cè)向力)。
2.2 前輪擺振穩(wěn)定性分析
將方程組進(jìn)行求解,得到7階特征方程,如下式所示:
A7D7+A6D6+A5D5+A4D4+A3D3+A2D2+A1D+A0=0(5)
應(yīng)用待定復(fù)參數(shù)法,設(shè)方程的根為Si=a+jb=-γωn+jωd,其中γ為阻尼比,ωn為前輪擺振的自然頻率,ωd為阻尼頻率。其含義如圖2所示,向量表示特征方程的根Si,向量的長(zhǎng)度表示ωn,β為相位角,γ=cos β。當(dāng)向量Si在左邊區(qū)域,則擺振是穩(wěn)定的;Si在左邊區(qū)域,擺振是非穩(wěn)定的;當(dāng)γ=0,即Si在jb軸上,擺振處于臨界狀態(tài),相應(yīng)的阻尼即為擺振臨界阻尼。
應(yīng)用MATLAB軟件編制了前輪擺振穩(wěn)定性分析程序進(jìn)行計(jì)算,應(yīng)用某型民用飛機(jī)和其前起落架參數(shù),考慮起落架在實(shí)際使用中的條件和起落架緩沖器的影響,在程序中輸入所需參數(shù),并進(jìn)行計(jì)算分析,判斷擺振穩(wěn)定性。
在前輪擺振穩(wěn)定性分析程序中,輸入起落架參數(shù)和初始條件,應(yīng)用牛頓迭代法進(jìn)行迭代計(jì)算,計(jì)算出擺振穩(wěn)定所需的臨界阻尼和在實(shí)際起落架減擺器阻尼系數(shù)下的阻尼比和擺振頻率。同時(shí)為了考慮起落架在實(shí)際使用過(guò)程中的使用范圍,計(jì)算了起落架在緩沖器在某壓縮行程時(shí)的狀態(tài),計(jì)算結(jié)果如圖3~圖5所示。
圖3為起落架某壓縮行程時(shí)計(jì)算的臨界阻尼系數(shù),其最大值為63.7 N.m.s/rad,在飛機(jī)滑跑速度為33m/s時(shí),臨界阻尼系數(shù)為0。
圖4為起落架某壓縮行程時(shí)計(jì)算的阻尼比,在起落架滑跑速度大于20m/s時(shí),阻尼比均大于4%,最大值為25%左右,說(shuō)明起落架在使用范圍內(nèi)穩(wěn)定性的裕度很高,而且隨著滑跑速度的增加,阻尼比也增大,這也符合圖3說(shuō)明的情況。
圖5為起落架在某壓縮行程時(shí)的擺振頻率,從圖中可以看出起落架滑跑速度在0~100m/s的范圍內(nèi),擺振頻率在25~43Hz之間,滑跑速度越高,擺振頻率越大。
通過(guò)上述分析,在起落架在使用范圍內(nèi)臨界阻尼系數(shù)最大為68.5N.m.s/rad;當(dāng)飛機(jī)滑跑速度大于20m/s時(shí)阻尼比均大于4%,有很高的擺振裕度。
3 前起落架擺振仿真分析
通過(guò)前起落架擺振分析得到了前起落架擺振穩(wěn)定的阻尼范圍區(qū)域和擺振頻率,以及擺振衰減的阻尼比。通過(guò)Virtual Lab軟件建立前起落架擺振仿真分析模型,模擬起落架在不同速度時(shí),通過(guò)設(shè)有墊塊的道面的振動(dòng)特性,判斷起落架的擺振穩(wěn)定性。
3.1 前起落架擺振仿真模型的建立
在前起落架仿真建模過(guò)程中,忽略機(jī)身的形狀,僅在機(jī)身和前起落架的連接點(diǎn)建立約束,進(jìn)行裝配仿真,并施加機(jī)身相應(yīng)的質(zhì)量。在滑跑過(guò)程中,收放機(jī)構(gòu)不起作用,刪去收放機(jī)構(gòu),刪除起落架上對(duì)擺振分析無(wú)影響的零件,包括起落架上的前照燈和螺栓、螺母墊片等。
最終簡(jiǎn)化的前起落架模型包括:簡(jiǎn)化的機(jī)身、上下斜撐桿、上下防扭臂、支柱外筒、卡箍、左右機(jī)輪、活塞桿與輪軸。機(jī)身與起落架之間用固定副和襯套力模擬,起落架各部件之間用相應(yīng)的轉(zhuǎn)動(dòng)副、固定副、球鉸和圓柱副和球鉸進(jìn)行模擬,在上、下防扭臂之間將轉(zhuǎn)動(dòng)副簡(jiǎn)化為球鉸。建立的前起落架模型如圖6所示:
在支柱外筒和活塞桿之間建立空氣彈簧力和油液阻尼力,其空氣彈簧力由起落架的壓縮曲線來(lái)模擬,如圖7所示。
油液阻尼力按照基于方程的不可壓縮油液阻尼力定義:
Do(S2)=DES2*(AH2-AC2)3/[2*CD2*(AO2-AC2)2](7)
DES2 :油密度(kg/m3) AC2:油針面積(m2)
AH2:緩沖支柱內(nèi)徑活塞面積(m2) AO2:油孔面積(m2)
CD2:壓縮時(shí)油孔泄油系數(shù)
起落架擺振仿真和輪胎模型建立的好壞有很大的關(guān)系,在前起落架擺振仿真模型中,選擇復(fù)雜輪胎模型,輸入所需參數(shù),其中輪胎壓縮剛度采用壓縮曲線進(jìn)行模擬,如圖8所示,并輸入其他所需參數(shù)。
在卡箍和外筒之間建立旋轉(zhuǎn)副,同時(shí)建立扭轉(zhuǎn)彈簧來(lái)模擬減擺阻尼器,需要輸入扭轉(zhuǎn)彈簧的剛度和阻尼數(shù)據(jù),其阻尼用阻尼曲線來(lái)模擬,如圖9所示。
3.2 擺振仿真分析計(jì)算
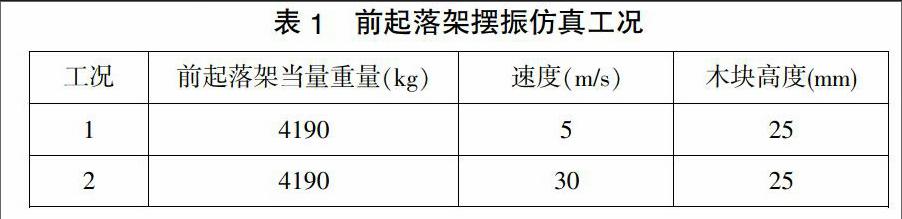
在擺振仿真之前,首先要定義道面。在擺振分析中,需要對(duì)機(jī)輪施加激勵(lì),故在道面設(shè)置一墊塊,與跑道中心線成45°角。前起落架以設(shè)定速度駛過(guò)墊塊,造成沖擊激勵(lì),使機(jī)輪出現(xiàn)初始偏角,墊塊高度和仿真的工況設(shè)為來(lái)兩個(gè)工況,如表1所示。
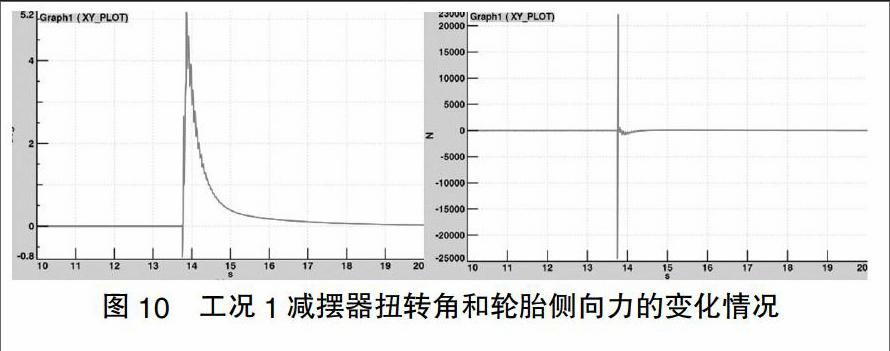
設(shè)置適當(dāng)?shù)姆治鰰r(shí)間和最大分析步長(zhǎng),選擇計(jì)算方法為BDF。各個(gè)工況的計(jì)算結(jié)果如圖10所示。
從圖10中可以看出,前輪以5m/s的速度駛過(guò)墊塊時(shí),發(fā)生5.2°的擺角,再經(jīng)過(guò)1s后,前輪擺角回復(fù)正常,并且并未出現(xiàn)反復(fù)的振動(dòng)情況,說(shuō)明減擺器的阻尼足夠大,不會(huì)發(fā)生擺振現(xiàn)象。
從圖11中可以看出,前輪以30m/s的速度駛過(guò)墊塊時(shí),發(fā)生1.2°的擺角,再經(jīng)過(guò)1s后,前輪擺角回復(fù)正常,并且并未出現(xiàn)反復(fù)的振動(dòng)情況。通過(guò)對(duì)比兩組工況發(fā)現(xiàn),工況1發(fā)生的前輪偏角大于工況2的情況,說(shuō)明5m/s也是此前起落架最容易發(fā)生擺振的行駛速度,這一點(diǎn)和圖3所示的分析相當(dāng)吻合。
4 結(jié)論
本文通過(guò)應(yīng)用某型飛機(jī)和起落架參數(shù),對(duì)前起落架進(jìn)行擺振模型的建立和擺振穩(wěn)定性分析,并應(yīng)用待定復(fù)參數(shù)法進(jìn)行分析計(jì)算。并且建立了前起落架擺振仿真模型,模擬了前起落架以不同的速度通過(guò)跑道墊塊時(shí)振動(dòng)情況。其分析計(jì)算和仿真結(jié)果表明起落架具有很高的擺振裕度,在正常的使用范圍內(nèi),起落架受到外部激勵(lì)作用,振動(dòng)會(huì)很快進(jìn)入收斂,不會(huì)發(fā)生擺振現(xiàn)象。
【參考文獻(xiàn)】
[1]諸德培.擺振理論及防擺措施[M].北京:國(guó)防工業(yè)出版社,1984.
[2]王軒.飛機(jī)前輪擺振穩(wěn)定性分析方法研究[D].南京:南京航空航天大學(xué),2007.
[3]Yager T.J., Aircraft Nose Gear Shimmy Studies[J].SAE Paper No.931401, 1993.
[4]Jocelyn I.P., An Overview of Landing Gear Dynamics[J]. NASA TM-1999-209143.
[5]Fong A. and Eng P., Shimmy Analysis of a Landing Gear System[C]//ADAMS International User conference, April 1995.
[6]Chris Hetreed., Preliminary Nose Landing Gear Shimmy Using MSC[C]//ADAMS Aircraft, MSC.ADAMS North American User Conference, 2002.
[7]王學(xué)軍.前輪非線性擺振極限環(huán)幅值的研究[J].振動(dòng)工程學(xué)報(bào),1992,5(4):384-390.
[8]周進(jìn)雄.起落架參數(shù)對(duì)飛機(jī)機(jī)輪擺振的影響[J].應(yīng)用力學(xué)學(xué)報(bào),2001,18(1):121-124.
[9]向錦武.飛機(jī)起落架擺振的阻尼特性影響[J].北京航空航天大學(xué)學(xué)報(bào),2005,31(12):1358-1362.
[10]盧京明.某型飛機(jī)的前輪擺振分析與計(jì)算[J].飛機(jī)工程,2001,3:14-20.
[責(zé)任編輯:曹明明]
