基于GPS技術(shù)的飛行器安全控制系統(tǒng)設(shè)計
2015-10-08 14:54:06張偉姜娜張朝陽
科技視界 2015年27期
關(guān)鍵詞:設(shè)計
張偉 姜娜 張朝陽
【摘 要】為保證地面重要軍事設(shè)施在飛行試驗中的安全,確保飛行器飛行在預(yù)定區(qū)域,在飛行器上安裝高可靠性的“安全控制設(shè)備”勢在必行。介紹了一種運用GPS技術(shù)確保飛行器始終飛行于預(yù)定安全區(qū)域的自動控制系統(tǒng)。本設(shè)計利用硬件和軟件功能相互結(jié)合,做了全面的可靠性設(shè)計,大大提高了使用安全性。
【關(guān)鍵詞】飛行器;安全控制系統(tǒng);設(shè)計
0 引言
飛行器在飛行試驗中,不僅要考慮設(shè)計穿越飛行中的預(yù)定航路,還要為性能下降或失效等突發(fā)狀況做盡可能多的防范。隨著經(jīng)濟的迅速發(fā)展,在試驗航區(qū)內(nèi)的保護目標也逐漸增多,對安全控制的范圍和可靠性要求也不斷提高,以確保飛行器在預(yù)定的區(qū)域內(nèi)飛行[1-2]。
本文提出一種安裝于飛行器上用于提供安全保障的嵌入式安全控制系統(tǒng),主要監(jiān)控飛行器是否按預(yù)定安全區(qū)域飛行,實時監(jiān)測飛行器的飛行工作狀態(tài)和運行軌跡。當(dāng)判定飛行器偏差較大或嚴重失控時,及時發(fā)出修偏校正或自毀操控等指令,保證試驗航路中設(shè)施免受飛行器威脅。
1 總體設(shè)計方案
本系統(tǒng)由安控計算機、GPS接收機組成,實現(xiàn)如下功能。
1.1 全程雙通道冗余測判
GPS定位正常時,所有安控決策均由主通道即定位測判通道作出;一旦GPS異常,系統(tǒng)自動切換至熱備份的偏航角積分測判通道;若GPS恢復(fù)正常,系統(tǒng)尚可反向切換。
1.2 預(yù)防性修偏
GPS定位正常時,若測判飛行器觸及容差線,安控計算機將發(fā)出“左修偏/右修偏”指令且持續(xù)時間與容差值成正比。駕駛儀接此指令后將即刻糾偏,可提前預(yù)防越界事件。
1.3 可預(yù)定的爬升規(guī)避
若射前裝訂爬升標識符為有效時,安控計算機將依據(jù)預(yù)定的定距側(cè)避點或理論終點時間向駕駛儀發(fā)送爬升規(guī)避指令;若裝訂爬升標識符為無效時則表示不選擇爬升規(guī)避。
1.4 超程/超時自毀
依據(jù)預(yù)定的超程距離或飛行超時時間,安控計算機將定距/定時發(fā)送超程自毀指令。
2 硬件設(shè)計
2.1 安控計算機
安控主機模塊采用DSP處理器,外擴512K FLSAH存儲程序和數(shù)據(jù)。該主機帶有與GPS、遙測、綜控機、安控輔機等通信的四個RS-442端口,帶有多個與外部進行信息交換的AD、I/O端口。
2.1.1 主控器
主控器采用TI公司的TMS320C6726B[3]。系統(tǒng)外擴FLASH存儲器選用SST39VF040,通過EMIF總線與DSP連接,系統(tǒng)上電后DSP的引導(dǎo)裝載軟件將SST39VF040中的飛控程序加載到TMS320C6726B的內(nèi)部RAM中運行。
2.1.2 輸入/輸出指令接口
輸入/輸出指令接口由CPLD器件EPM1270實現(xiàn)擴展,通過CPLD編程實現(xiàn)管腳特性定義和地址分配。
輸入指令通過光電耦合器MOCD-213隔離后接至CPLD的I/O口,由DSP讀取輸入指令對應(yīng)地址的數(shù)據(jù),判讀輸入指令狀態(tài)。
輸出指令由DSP通過數(shù)據(jù)線向指定地址寫數(shù)據(jù),由CPLD的管腳輸出,經(jīng)總線收發(fā)器SN74LVC4245A完成電平轉(zhuǎn)換后驅(qū)動固態(tài)繼電器輸出指令。
2.1.3 通訊接口
安控計算機共兩路UART串行接口,接收端隔離。串口芯片選用TI公司的TL16C754BPN,包含4路獨立串口。RS-422電平轉(zhuǎn)換選用MAX490ESA,接收端選用Hp公司的雙通道高速光電耦合器HCPL063N實現(xiàn)隔離。
2.1.4 AD接口
安控計算機的A/D轉(zhuǎn)換器選用AD7656BST,輸入模擬信號的地經(jīng)過100歐姆電阻實現(xiàn)與A/D芯片模擬地的隔離,然后經(jīng)濾波電路后輸入AD7656BST。
2.2 GPS模塊
GPS信息是飛行器安全測判的主要信息源,GPS模塊由GPS模塊主機、接收天線和高頻饋線組成,配置兩路RS-422串口,一路至飛行器遙測設(shè)備,傳輸原始信息,其中包括偽距幀、電文幀和定位幀;另一路至安控計算機,傳輸飛行器遙測站用事后差分信息和飛行器實時定位信息,數(shù)據(jù)周期性刷新。
3 軟件設(shè)計
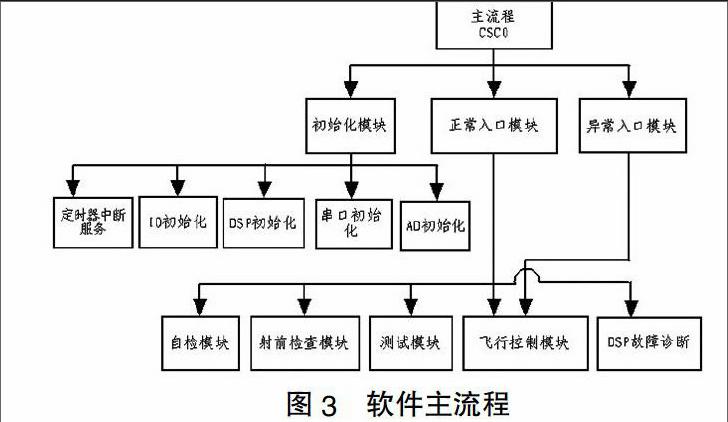
3.1 軟件結(jié)構(gòu)
安控軟件主流程示意圖如圖3所示。
3.1.1 自檢模塊
自檢模塊完成安控計算機的自檢,包括Flash檢查、RAM檢查、輸入/輸出指令初始狀態(tài)檢查。
3.1.2 射前檢查模塊
射前檢查首先讀串口信息,檢測射前檢查命令,如果命令到來則依次進行GPS性能檢查、遙測接口檢查、串口檢查。
3.1.3 飛行控制模塊
飛行控制模塊是安控計算機軟件的核心部件,飛行器收到飛行零秒后進入飛控循環(huán)并周期性的進行解算,是飛試過程中必須執(zhí)行的安全控制任務(wù)。進入飛控循環(huán)后,依次執(zhí)行時序指令、GPS狀態(tài)測判、位置測判、偏航測判,發(fā)送遙測數(shù)據(jù)。
1)定時模塊
進入飛行零點后,在相應(yīng)起控時間點發(fā)出對應(yīng)的控制指令。起控時間累加至某一時間,安控解鎖并將偏航積分標志置為有效,記錄當(dāng)前的航向陀螺角。
2)GPS測判模塊
GPS測判的目的是判斷GPS接收機的工作狀態(tài)是否正常,信息是否可用,以及信息如何處理。GPS測判模塊包括:GPS定位狀態(tài)測判、坐標轉(zhuǎn)換、信息濾波、失捕處理。
進入GPS定位狀態(tài)測判子模塊后,安控計算機查詢GPS串口信息并設(shè)置GPS判讀標識來記錄GPS狀態(tài)。
當(dāng)GPS定位正常,狀態(tài)字全零且位置信息有效時,執(zhí)行位置信息的坐標轉(zhuǎn)換和濾波處理。坐標轉(zhuǎn)換將GPS輸出的以地心坐標系為參考的信息轉(zhuǎn)換至發(fā)射坐標系。
濾波處理的目的是判斷當(dāng)前點是否為野值點,采用速度濾波的方法,以設(shè)定的相對誤差限為判決條件。
飛行過程中,GPS允許失捕,設(shè)置其最長失捕時間,當(dāng)GPS失捕時間不大于最長失捕時間時,由外推算法得到當(dāng)前點的坐標值。
定位測判時,以基準坐標系為參考,將坐標信息從發(fā)射坐標系轉(zhuǎn)換至基準坐標系。
3)位置測判模塊
安控解鎖后,安控計算機以GPS坐標信息為依據(jù),每個解算周期都將對飛行器的位置進行測判,完成對理論終點時間時差修正、一次性修偏控制、超程判斷、越界判斷。
在飛行器發(fā)射前須完成對安控任務(wù)參數(shù)中理論飛行終點時刻T以及飛行器航向定距側(cè)向規(guī)避點X的裝訂。當(dāng)飛行器航向距離小于定距側(cè)向規(guī)避點,且飛行器累計飛行時間不小于理論飛行終點時刻時,安全控制系統(tǒng)啟動對理論終點時刻T的修正。
當(dāng)飛行器GPS處于定位狀態(tài),飛行器在飛行過程中偏離航向的側(cè)向?qū)挾却笥谛奁鹂貥藴蕰r,安控計算機發(fā)出一次性修偏控制指令。
超程判斷包括超時判斷和超程判斷。若飛行器GPS定位正常時,采用GPS位置信息判斷飛行器的飛行距離是否超過射前裝訂的終點距離,當(dāng)?shù)竭_終點距離時安控發(fā)出超程告警;若GPS定位異常位置信息不可信時,飛行器依據(jù)射前裝訂的終點時間來判定飛行時間是否超時,并確定是否發(fā)出超程告警指令。
越界判斷用于判斷飛行器是否超出安全區(qū)域的側(cè)向邊界。當(dāng)側(cè)向?qū)挾却笥谏淝把b訂的越界預(yù)警變量時,安控計算機發(fā)出越界告警指令。
4)偏航測判模塊
偏航積分測判以安控解鎖為啟動依據(jù)。安控解鎖后啟動偏航積分測判。偏航測判模塊對航向陀螺信息動態(tài)偏差角進行積分得到飛行器側(cè)向位移。
當(dāng)GPS定位正常位置信息可用時,周期性的采用轉(zhuǎn)換得到的基準橫向坐標值對偏航積分側(cè)向位移標定一次。GPS狀態(tài)異常時,依據(jù)設(shè)定的安控管道計算出偏航預(yù)警變量值,并將偏航積分側(cè)向位移與偏航預(yù)警變量值進行比較,若偏航積分側(cè)向位移大于偏航預(yù)警變量值時,安控發(fā)出偏航告警指令。
4 結(jié)束語
本文介紹的是一種基于嵌入式的飛行器安全控制系統(tǒng),確保了飛控解算實時、可靠。系統(tǒng)采用雙通道冗余控制,運用GPS信息作為主測判手段,偏航角積分測判為輔測判通道;飛行試驗全程可以進行一次糾偏提前預(yù)防越界;安控計算機能準確發(fā)出越界、超程/超時指令,控制飛行器實施自毀。飛行試驗結(jié)果表明,本安全控制系統(tǒng)安控策略可靠、有效,其設(shè)計思想和系統(tǒng)架構(gòu)對于飛行器的可靠性以及飛行試驗安全性設(shè)計具有較高的參考價值。
【參考文獻】
[1]常均雨.艦載試驗靶彈航區(qū)安全飛行控制[Z].艦載導(dǎo)彈武器及其發(fā)射安全研討會.
[2]陳德勇,徐伯夏,楊遠波.GPS在戰(zhàn)術(shù)導(dǎo)彈飛行試驗中的應(yīng)用[Z].2000年全國第九屆空間及運動體控制技術(shù)學(xué)術(shù)會議,2000.
[責(zé)任編輯:鄧麗麗]
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
