自動泊車系統仿真研究
2015-10-19 10:02:33梁赫西湖南大學信息科學與工程學院湖南長沙4008湖北師范學院教育信息與技術學院湖北黃石43500
網絡安全與數據管理 2015年22期
伍 凱,梁赫西(.湖南大學 信息科學與工程學院,湖南 長沙 4008;.湖北師范學院 教育信息與技術學院,湖北 黃石 43500)
自動泊車系統仿真研究
伍 凱1,梁赫西2
(1.湖南大學 信息科學與工程學院,湖南 長沙 410082;2.湖北師范學院 教育信息與技術學院,湖北 黃石 435002)
對比分析了最小半徑泊車算法和不等半徑泊車算法的基本原理,分析了汽車在低速情況下泊車入庫時的后輪軌跡特點。同時在MATLAB環境下對兩種算法進行了仿真研究,并且對仿真數據進行了比較分析。結果表明,不等半徑泊車算法對泊車起始位置要求相對較低,更符合實際操作需求。
自動泊車系統;泊車路徑規劃;建模與仿真
0 引言
自動泊車系統是一種智能汽車安全輔助系統,是一種全新的智能駕駛技術,它能夠使汽車駕駛員在復雜的城市環境內快速便捷地完成泊車任務,降低了因泊車空間狹小或駕駛技術不熟練而引發交通事故的概率,對于當前汽車工程領域的研發具有重要意義[1-2]。
近幾年,國內外很多學者對自動泊車系統進行了相關研究。法國國立計算機及自動化研究院Paromtchik等人研究了泊車運動軌跡方面的工作[3],臺灣成功大學Chao等人通過全景攝像頭獲取模型小車相對于車位之間的位置并生成可行的參考泊車路徑[3],德國艾爾默斯公司(Elmos)宣布推出可用于驅動超聲波傳感器的E524.02和E524.03數字超聲波倒車輔助系統系列芯片[4],其中浙江大學開展的相關研究是該領域的優秀代表。浙江大學周泓、王文飛對實現自動泊車系統涉及到的3個核心算法進行了探索和研究[5],根據泊車位空間信息,通過泊車路徑算法計算出一條最簡單泊車的行車路徑,但是并沒有將該算法與不等半徑泊車算法進行對比,沒有對泊車起始位置的誤差進行數據分析。本文針對泊車起始位置的選擇,以泊車路徑規劃為依據,對比分析了最簡單泊車算法和不等半徑泊車算法的基本原理,通過仿真數據分析,總結出兩種泊車算法對汽車起始位置的約束范圍。
1 模型建立與算法分析
1.1 運動學模型的建立
正常情況下,汽車倒車過程可以認為是低速保持不變的過程[6],在這種情況下車輪不會發生側滑,可以認為車后輪垂直方向速度為0,其方程式為:
y′·cosθ-x′·sinθ=0 (1)
根據圖 1車輛運動學模型[7]可知,汽車前、后軸中心點位置關系有:


圖1 車輛運動學模型示意圖
對式(2)進行微分,得到其速度關系表達式:

將式(3)代入到式(1)可得到關系式:

此外,前輪軸中心點處的x、y方向上的速度為:

由此將式(5)代入式(4),即可求得車輛回轉圓角速度為:

將式(5)、(6)代入式(3)得到后軸線中心點在 x、y方向上的速度為:

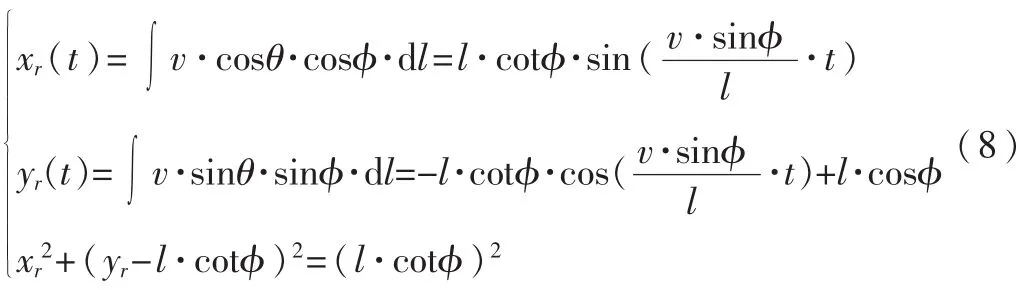
然后將式(6)對時間積分,最后代入式(7)后,再對時間微分,即可得到后輪軸線中心點軌跡方程:
1.2 泊車算法分析
1.2.1 最簡單泊車算法
由圖2最簡單泊車示意圖可知,車輛泊車軌跡是由兩段相切的圓弧組合而成的S形曲線。最簡單泊車過程中,汽車始終以最小轉彎半徑運動。汽車首先往停車位方向將方向盤打死,從起始位置 S0(x0,y0)到達兩段圓弧的切點C,然后再反方向打死方向盤直至到達目標位置Sd(xd,yd)。根據數學理論基礎可知,車輪劃過的圓弧曲線長度最短,所需的停車位空間最小,汽車可以方便快速地完成泊車任務。
1.2.2 不等半徑泊車算法
由于最簡單泊車算法對汽車起始位置要求較高,當車輛未能到達標準起始位置時,容易導致泊車過程失敗。其失敗的主要原因在于汽車兩段泊車軌跡均以最小泊車半徑運動,起始位置可控范圍較小[8]。由圖 3不等半徑泊車示意圖可知,如果將第一段泊車軌跡改為不等半徑運動,那么對于汽車起始位置的要求會大大降低,整個泊車過程更加簡單方便。
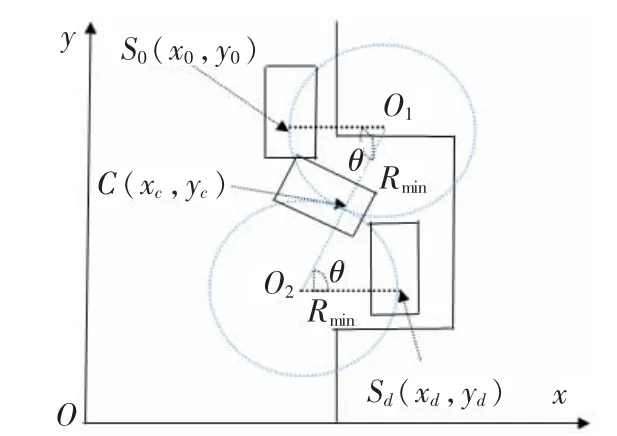
圖2 最簡單泊車示意圖
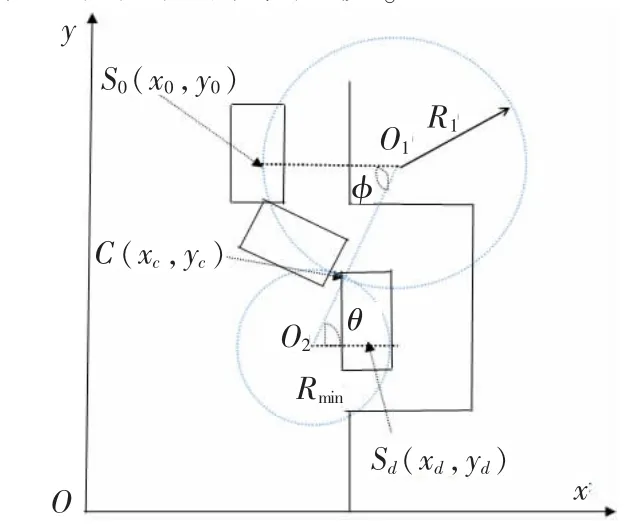
圖3 不等半徑泊車示意圖
2 仿真結果分析
本文根據運動學模型建立MATLAB仿真[9],由汽車后輪軸中心點軌跡方程進行仿真,其結果如圖4所示。
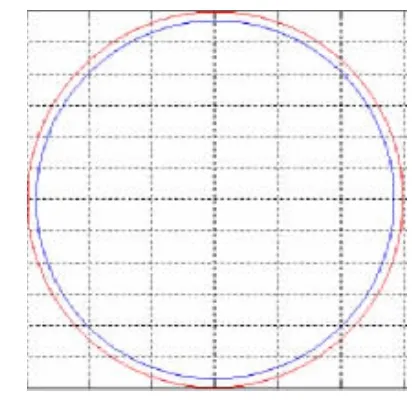
圖4 汽車后輪軌跡圖
由軌跡方程和圖4汽車后輪軌跡圖容易得知,汽車車輪始終在做等半徑同心圓運動,車后輪軌跡與汽車軸距和車身轉向角有關,而與汽車行駛速度無關,由此可以得出,汽車泊車過程實際是汽車車輪反復畫圓弧的過程。基于該理論基礎,下面對泊車過程軌跡進行仿真分析。
通過建立笛卡爾坐標系,對汽車車身各點坐標進行準確的定位,從而對泊車過程中的泊車軌跡進行仿真,最簡單泊車、不等半徑泊車軌跡圖分別如圖5、圖6所示。由仿真圖可知,雖然不等半徑泊車算法的第一段泊車半徑明顯大于汽車最小轉彎半徑,而且汽車所需的停車位長度也明顯增加,但是其對于汽車起始位置的可控范圍明顯增大。
不同的汽車駕駛員具有不同的駕駛習慣和駕駛技能,在實際操作中,無法保證每一個駕駛員都能準確到達標準的起始位置。出于以上情況的考慮,下面將從起始位置的變化范圍對兩種算法進行仿真數據分析和比較。
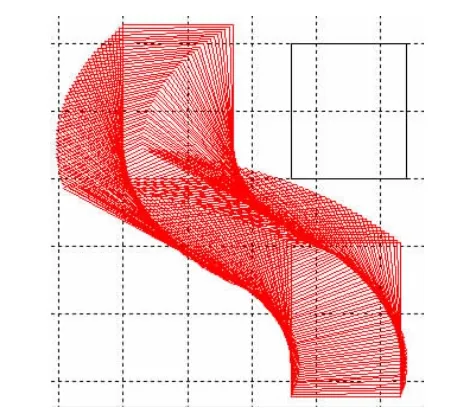
圖5 最簡單泊車軌跡仿真圖
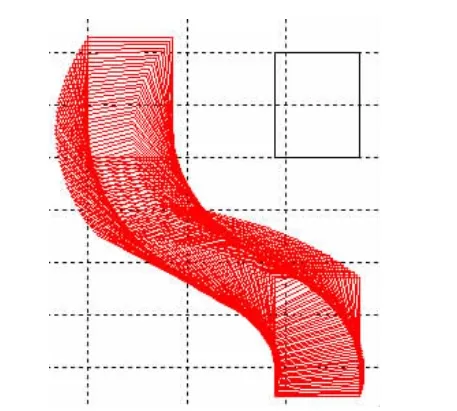
圖6 不等半徑泊車軌跡仿真圖
通過表1第1組數據的汽車后軸中心點坐標易求得泊車空間右墻面頂點坐標為(4407.39,-6524.94),據數據統計,普通停車位的大小為 2.2m×7.5m[10-11],由此可確定最簡單泊車算法的橫向坐標變化范圍為2207mm~4407mm。同時,由圖7和表1第5組數據容易得到當汽車起始位置為(455,999)時,汽車左下端橫坐標為2197.39,小于最簡單泊車橫坐標變化范圍的最小值,此時,汽車車身超出停車位空間,最簡單泊車方案失敗。在這種情況下,汽車后軸中心點的橫向位置變化范圍不足400mm,這對于駕駛員對起始位置的控制有著很高的要求,缺乏一定的靈活性。
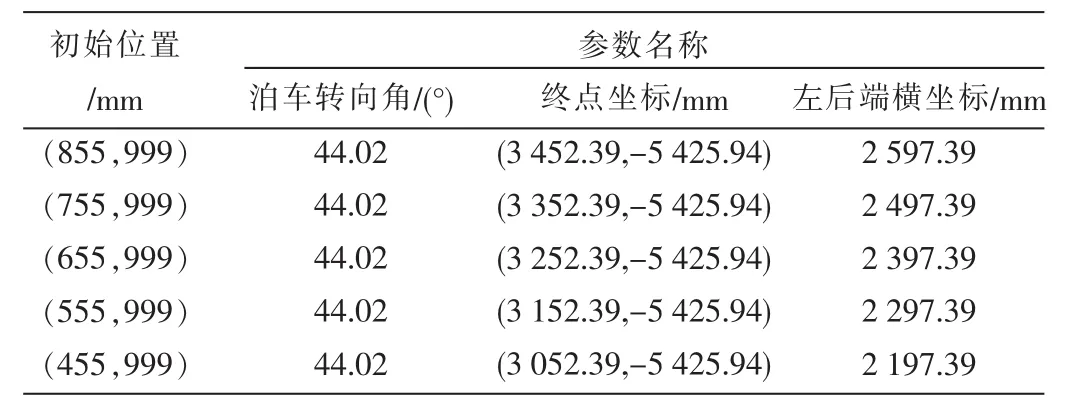
表1 最簡單泊車MATLAB計算值
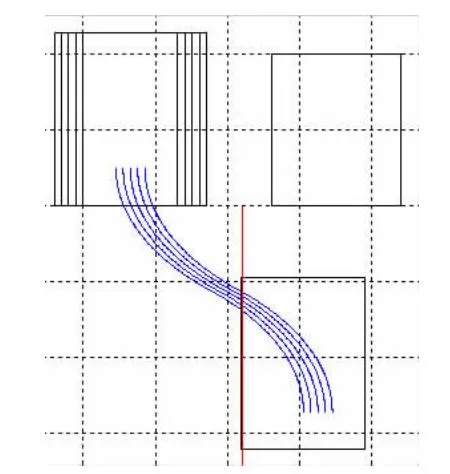
圖7 最簡單泊車起始位置分析圖
根據表2數據分析可知,隨著汽車起始位置的改變,第一段泊車半徑也逐漸增大,且大于汽車最小轉彎半徑。另外,由圖8和表2第5組數據可知,當起始位置為(455,999)時,第一段泊車半徑為 6888.39 mm,小車成功到達目標位置,順利完成泊車過程,相比最簡單泊車的橫向位置變化范圍,該算法更加靈活方便。
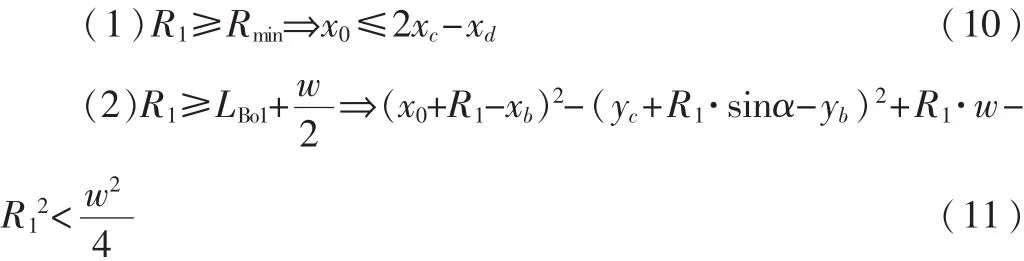
對于有效的起始位置,必須保證在泊車過程中不與周圍的障礙物發生碰撞。通過數學建模,可以將這一問題簡化為兩個約束條件[5]:
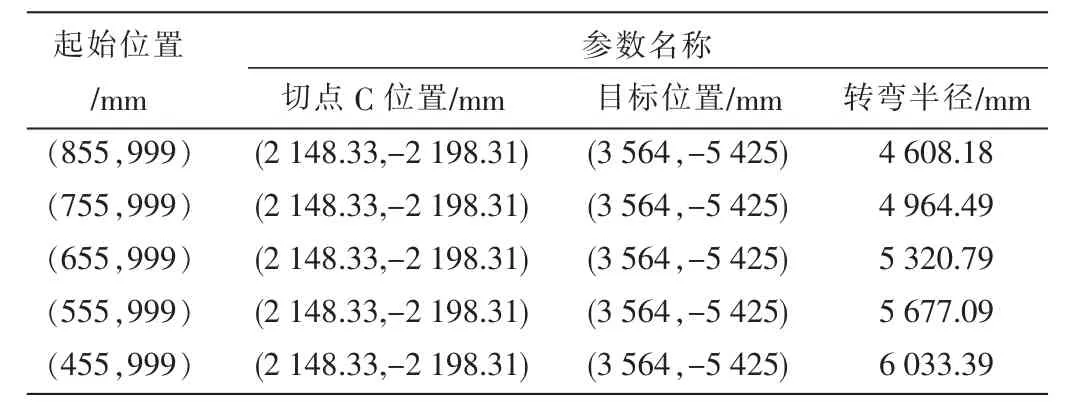
表2 不等半徑泊車MATLAB計算值

圖8 不等半徑泊車起始位置分析圖

其中,LBo1為圓心 O1到前方障礙物的距離,L為車寬。
由此可以確定橫向位置的變化范圍:
確定了橫向位置的變化范圍,再通過橫縱坐標的幾何關系,同理可以確定縱向位置的變化范圍。下面通過改變汽車起始位置和目標位置的坐標,由兩個約束條件計算出汽車起始橫向位置和縱向位置的變化范圍,如表3所示。
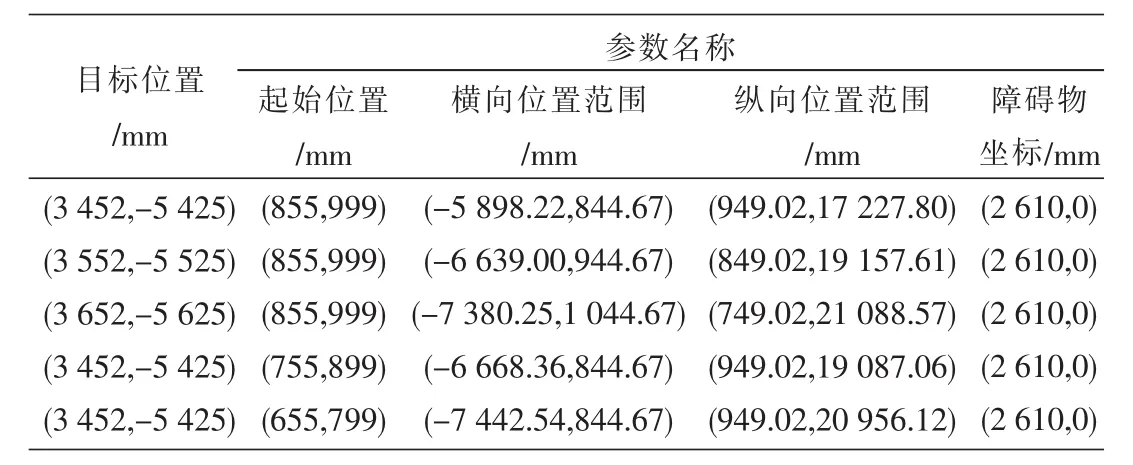
表3 不等半徑泊車起始位置范圍MATLAB計算值
通過表3數據分析可知,不同的起始位置和目標位置所對應的水平橫向位移不同。不等半徑泊車算法使起始位置的選擇不再局限于一點上,更加符合實際的需要,通過該算法使泊車過程更加方便快捷。
3 結論
本文首先通過建立泊車過程的運動學模型,得到車輪運動軌跡表達式,然后通過在MATLAB下的泊車軌跡仿真,驗證了最簡單泊車和不等半徑泊車的可行性,并且將兩者進行對比分析仿真,得到不等半徑泊車算法對汽車起始位置的要求相比最簡單泊車算法更加符合實際需求,對于起始位置的選擇更加靈活方便。
[1]祿盛,黃顯杭,蘇嶺,等.自動泊車系統模型研究與實車驗證[J].重慶郵電大學學報(自然科學版),2014,26(4):522-529.
[2]Ryu Young-woo,Oh Se-young,Kim Sam-yong.Ro-bust automatic parking without odometry using en-hanced fuzzy logic controller[A].IEEE International Conference on Fuzzy Systems,Sheraton Vamcouver Wall Centre Hotel,Vancouver,BC,Conda,2006.
[3]樸昌浩,祿盛,張艷,等.自動泊車系統設計[M].北京:科學出版社,2014.
[4]艾爾默斯公司.數字超聲波倒車輔助系統[J].微型機與應用,2013,32(10):89.
[5]周泓,王文飛.自動泊車系統中核心算法的研究[J].電路與系統學報,2012,17(3):71-76.
[6]楊妮娜,梁華為,王少平.平行泊車的路徑規劃方法及其仿真研究[J].電子測量技術,2011,34(1):42-45.
[7]張偉東.基于預瞄點的自動倒車設計和實現[J].輕工機械,2011,29(3):96-100.
[8]王道斌,梁華為,楊妮娜,等.兩種自主泊車路徑規劃方法的對比研究[J].電子測量技術,2011,34(1):27-31.
[9]薛年喜.MATLAB在數字信號處理中的應用[M].北京:清華大學出版社,2008.
[10]羅奕樹,張在龍,王日信.自動泊車小車轉彎參數及特征環境參數的確定[J].閩江學院學報,2011,32(5):46-50.
[11]Zhao Yanan,EMMANUEL G.Collins Jr..Robust automatic parallel parking in tight spaces via fuzzy logic[J].Robotics and Autonomous Systems,2005(51):111-127.
Simulation research of automatic parking system
Wu Kai1,Liang Hexi2
(1.College of Computer Science and Electronic Engineering,Hunan University,Changsha 410082,China;2.College of Education Information and Technical,Hubei Normal University,Huangshi 435002,China)
This paper analyzed and compared the basic principle of minimum radius parking algorithm and unequal radius parking algorithm,and the characteristics of the rear wheel track when the vehicle is parking in low speed were analyzed.At the same time,the simulation of two algorithms is carried out in MATLAB environment,and the simulation data is compared and analyzed.The results show that the parking algorithm with unequal radius parking algorithm is relatively low,and is more practical for real operation.
automatic parking system;parking path planning;modeling and simulation
TP13
A
1674-7720(2015)22-0018-04
伍凱,梁赫西.自動泊車系統仿真研究[J].微型機與應用,2015,34(22):18-21.
2015-06-24)
伍凱(1993-),男,碩士研究生,主要研究方向:自動控制。
梁赫西(1982-),通信作者,男,博士研究生,講師,主要研究方向:數字系統設計。E-mail:lhx-hbnu@163.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50