基于MatlabSimulink設計的直接轉矩控制系統仿真
2015-10-19 00:27:25師素娟馬少丹
河南科技 2015年24期
關鍵詞:模型
師素娟 滿 達 馬少丹
(華北水利水電大學,河南 鄭州 450011)
基于MatlabSimulink設計的直接轉矩控制系統仿真
師素娟 滿 達 馬少丹
(華北水利水電大學,河南 鄭州 450011)
本文設計了一種基于MatlabSimulink軟件仿真的直接轉矩控制系統,通過其數學仿真功能設計出直接轉矩控制系統的轉矩調節、轉速調節等模塊,組成三相異步電動機的直接轉矩控制系統。仿真結果證明了該方法能夠準確的控制三相異步電動機的速度和轉矩穩定輸出。
異步電動機;數學仿真;直接轉矩
三直接轉矩控制系統通過檢測定子電壓和電流,在定子坐標系下觀測電機的磁鏈、轉矩,并將觀測值與給定的磁鏈、轉矩相比較,綜合考慮磁鏈和轉矩信號選擇電壓空間矢量,直接對電機定子磁鏈及轉矩進行控制。本文通過Matlab Simulink的建模仿真功能,建立了一種三相異步電動機直接轉矩控制系統仿真模型。
1 直接轉矩控制系統仿真
1.1直接轉矩控制系統工作原理
直接轉矩控制摒棄了矢量控制中解耦的控制思想,采用定子磁鏈定向和瞬時空間矢量理論,通過檢測定子電壓和電流,在定子坐標系下觀測電機的磁鏈、轉矩,并將觀測值與給定的磁鏈、轉矩相比較,差值經滯環控制器調節得到相應的控制信號,綜合考慮磁鏈和轉矩信號選擇電壓空間矢量,直接對電機定子磁鏈及轉矩進行控制,在實現磁鏈控制的同時,也實現了轉矩的直接控制,從而使得直接轉矩控制的交流感應電機變頻調速系統具有優越的動靜態性能。
1.2三相異步電動機和逆變器
三相異步電動機和逆變器使用的是Matlab Simulink軟件中自帶模型庫中的模型。如圖1所示:
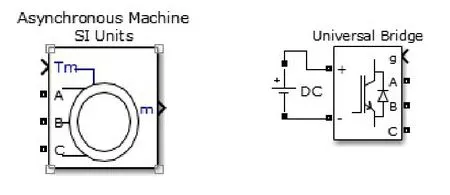
圖1 三相異步電動機和逆變器
逆變器在三相異步電機的直接轉矩控制系統中是一個重要原件。本文采用的是三相兩點式電壓型逆變器,該逆變器有三個橋臂,六個開關組成,由于同一個橋壁上的兩個開關不能同時接通和斷開,故共有八種開關組合。該模型八個工作電壓在αβ正交定子坐標系中可以輸出八個基本輸出矢量,其中有兩個零矢量,相當于三相異步電動機繞組短接。另外六個非零矢量組成了電壓空間矢量。幅值為2Udc/3(Udc為直流電壓),如圖2所示(0、1代表逆變器A、B、C的開關狀態)。
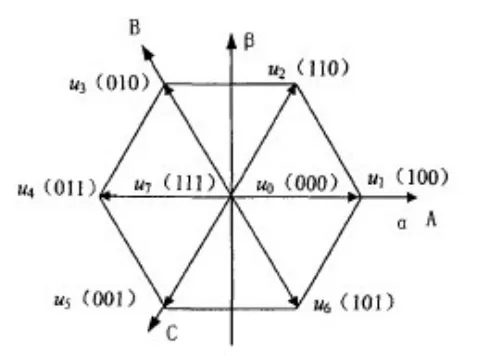
圖2 三相電壓型逆變器的電壓空間矢量
1.3磁鏈滯環調節和轉矩滯環調節
磁鏈滯環調節的目的就是根據估算出的磁鏈判斷磁鏈的運動軌跡位置,并且能夠正確的反映變化的磁鏈開關信號來選擇相應的電壓空間矢量。根據定子電壓和定子磁鏈之間的關系可以用公式(1)來表示:

也可以寫成微分形式:

由于定子電阻R_s對定子電壓核磁憐的影響小可忽略不計則:

由公式(2)可以看出三相異步電動機的定子磁鏈的運動方向是沿著定子電壓的方向運動的,這樣便在正交定子坐標系中形成了六個磁鏈扇區。
磁鏈滯環調節的調節過程是通過滯環比較器實現的。在允許的偏差范圍內輸出磁鏈信號,當磁鏈信號的磁鏈值達到了調節器的下限,此時應該增加磁鏈的電壓空間矢量,反之當磁鏈值達到了調節器的上限則減小磁鏈的電壓空間矢量;像這樣反反復復的對磁鏈進行調節,可以維持近似圓形的磁鏈軌跡。
轉矩滯環調節的作用就是對電機的轉矩實現直接控制。如公式(4)所示:

轉矩滯環調節也是通過滯環比較器來實現對轉矩的直接控制。輸入信號為轉矩的給定值和實際值之間的偏差。當偏差值大于允許范圍內最大偏差值時輸出信號應選擇能增大電磁轉矩的電壓空間矢量;當偏差值在允許范圍之內時,轉矩保持不變;當小于最小偏差值時,應減小電壓空間矢量,降低轉矩。
1.4電壓矢量開關信號選擇
根據對磁鏈滯環調節和轉矩滯環調節控制原理的分析可知,直接轉矩控制的關鍵是在于根據磁鏈和轉矩的要求合理的選擇電壓空間矢量,就是將兩個調節器和磁鏈所在扇區結合起來共同控制逆變器的開關狀態,既要保證三相異步電動機的定子磁鏈在給定的范圍內變化,又要保證三相異步電動機的輸出轉矩快速的跟隨給定變化,是直接轉矩系統獲得良好的動態性能。
電壓空間矢量開關信號選擇是直接轉矩控制系統的精髓。為了實現對定子磁鏈的閉環控制,需要判斷定子磁鏈的空間位置,根據定子磁鏈在靜止兩相α-β坐標系下的空間角度θ得出定子磁鏈所在扇區(如圖2所示)以及電壓矢量空間開關表最終得到電壓空間矢量開關信號。仿真模型如圖3所示。
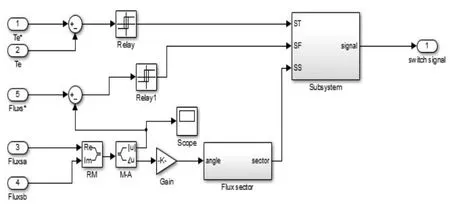
圖3 電壓矢量開關信號選擇仿真模型
1.5定子磁鏈u-i模型觀測器
定子磁鏈u-i模型就是通過定子電壓和定子電流來確定定子磁鏈,根據公式(1)來確定三相異步電動機的定子磁鏈優點是計算方法簡單,只需要知道三相異步電動機的定子電阻參數,并且式中的定子電壓us和定子電流is可以通過電壓電流傳感器測量出來,方便觀測磁鏈。仿真模型如圖4、5所示。
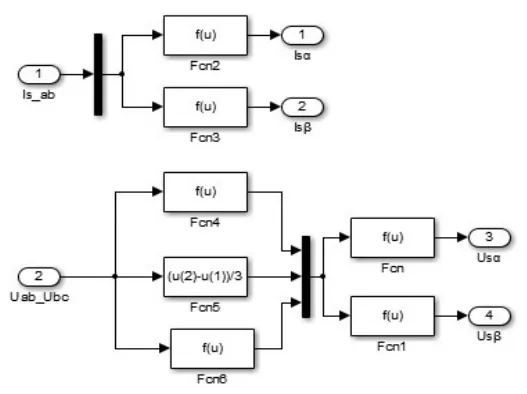
圖4 定子磁鏈u-i觀測模型
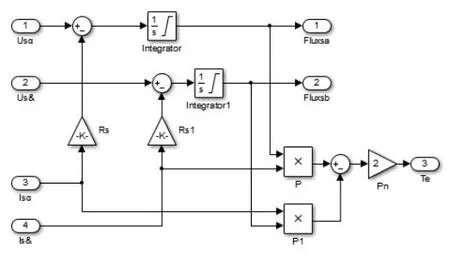
圖5 定子磁鏈u-i觀測模型
2 直接轉矩控制系統仿真結果分析
針對上述設計的Matlab Simulink仿真模型進行空載和負載兩種情況的實驗。三相異步電動機相關參數如下:額定功率15kw,額定電壓400v,頻率50Hz,最高轉速1460r/min。定子磁鏈給定幅值0.8。
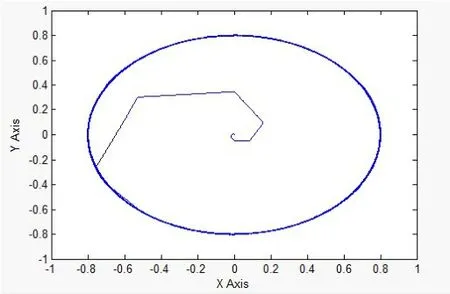
圖6 定子磁鏈運動軌跡
如圖6所示,當系統開始運行時,定子磁鏈的幅值從0開始迅速增長,很快達到磁鏈的給定幅值0.8左右,然后通過直接轉矩控制理論對三相異步電動機的定子施加不同的電壓矢量,磁鏈幅值被限制在較小的容差范圍內,從而利用此模型建立了一個運動軌跡近似為圓形的定子磁鏈。當外部負載發生變化時,對定子磁鏈的運動軌跡影響仍然很小。
①電機空載運行試驗
轉速1200r/min,負載為0N*m。
如圖7、8所示,三相異步電動機的啟動時間為0.5s,啟動轉速峰值為1420 r/min。電機在啟動過程中,電機轉速不斷上升到峰值并保持。經過0.5s后,啟動完成,電機轉速緩慢下降至1200 r/min并保持。波形顯示穩定。轉速波形達到穩定值為1200.95r/min。響應時間為0.1652s。
穩態誤差:(1200.95-1200)/1200×100%=0.08%
超調量:(1420-1200.95)/1200.95×100%=18.2%
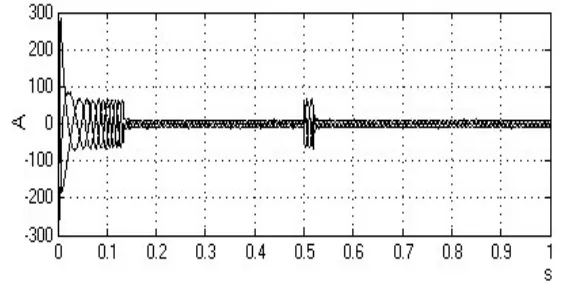
圖7 空載時定子電流
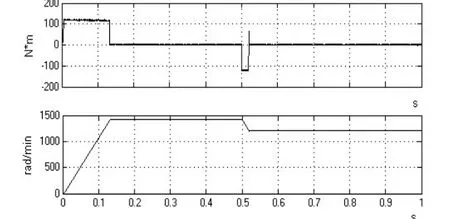
圖8 空載運行轉矩與轉速對比圖
②電機負載運行試驗
轉速1200r/min,負載為100N*m
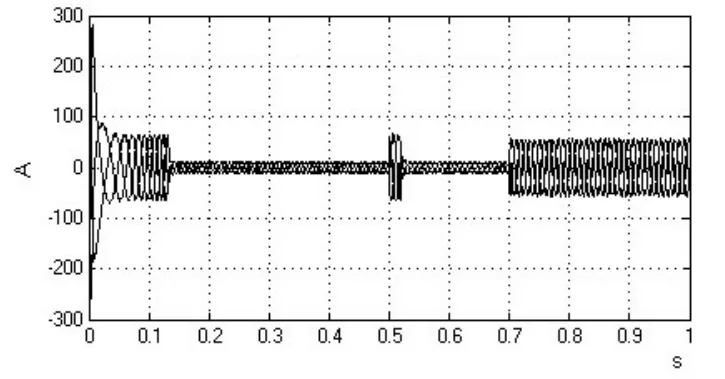
圖9 負載時定子電流圖

圖10 負載運行轉矩與轉速對比圖
如圖9、10所示,同樣啟動時間為0.5s,啟動峰值為1420 r/min。啟動完成后,在0.7s時讓電機負載運行。從圖中可以看到在0.7s時定子電流發生了變化,轉矩也從0N*m上升到了100N*m。
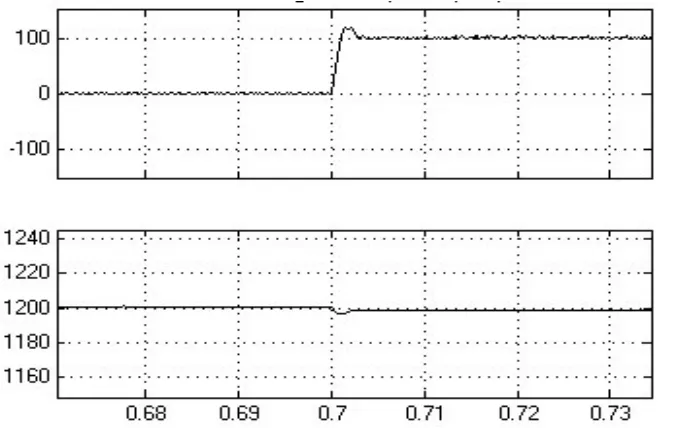
圖11 負載運行轉速、轉矩局部放大
圖11是圖10的局部放大,在0.7s時給電機加載,這時發生了一個細微的變化:負載轉矩上升,轉速降低,隨后又回到了恒轉速的狀態并一直處于負載運行的狀態。
通過對空載、負載兩種情況的分析可以看出,在低速狀態下的電磁轉矩脈動小,穩態時,定子電流含有的諧波比重小。在運行過程中具有響應快、靈敏度高、穩定性強等優點。
3 結語
通過MatlabSimulink建立的直接轉矩控制系統仿真模型在研究三相異步電動機速度控制穩定性方面操作起來十分方便。
[1]林輝,王輝.電力電子技術[M].武漢:武漢工業出版社,2002.
Simulation of Direct TorqueControl SystemDesigned by Matlabsimulink
Shi Sujuan Man Da Ma Shaodan
(North China University of Water Resources and Electric Power,Zhengzhou Henan 450045)
This paper designed a direct torque control system simulated by Matlabsimulink software,through its mathematical simulation capabilities designed the torque control,speed regulation and other modules of direct torque control system,to consist of a direct torque control system of three-phase asynchronous motor.Simulation results show that the method can accurately control the speed of three-phase asynchronous motor and the stable output of torque.
asynchronous motor;mathematical simulation;direct torque
TP273+.2
A
1003-5168(2015)12-0030-3
2015-12-15
師素娟(1960-),女,副教授,研究方向:機械CAD及仿真技術、工程車輛現代設計技術方面的研究;滿達(1991-),男,碩士生,研究方向:自動控制、儀器儀表等方面的研究;馬少丹(1989-),女,碩士生,研究方向:機電一體化方面的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19