船舶柴油發電機調速控制系統研究
2015-10-21 19:51:15黃辰燁
中國機械 2015年1期
黃辰燁


摘 要:針對在船舶柴油發電機組的控制中,發電機頻率不能及時準確調整的問題。在傳統的控制回路中增加前饋模糊控制器,對柴油機的油門進行調節控制,穩定柴油機的轉速,達到穩定頻率的目的。
關鍵詞:柴油發電機;調速控制器;模糊控制
1.船舶柴油發電機調速器簡介
目前,在船舶交流電力系統中,發電裝置廣泛采用柴油發電機,即柴油機驅動同步發電機為船舶進行供電。船舶交流電的質量是通過電壓和頻率的穩定性來反映的,頻率的穩定是取決于原動機的調速系統。由于船舶電力系統容量相對較小,諸如船舶側推器、機船大粟等大型用電設備起停時,都會使船舶電力系統負載發生顯著變化。隨著船舶交流電力系統負載的變化,根據功率守恒,發電機輸出的有功功率也要發生相應地變化,這個過程是個電磁變化過程,而且非常迅速。因此,柴油機的轉速控制在船舶電力系統中極為重要。
柴油機調速裝置的作用是通過改變油量調節機構,將柴油機的轉速調節到規定的轉速范圍,并且根據柴油機負載的大小自動調節供油量,使其轉速維持在一規定范圍[1]。《鋼制海船入級與建造規范(2006)》第3篇的9.7.3.1條規定,帶發動機的原動機(包括柴油機和汽輪機)必須裝有調速器,其調速特性應符合下列規定:當突然卸去額定負載時,其瞬時調速率不大于額定轉速的10%,穩定調速率不大于額定轉速的5%,即頻率的變化率不大于5%,穩定時間(即轉速恢復到規定的波動率范圍的時間)不超過5s。
2.帶前饋模糊控制系統的組成和控制原理
2.1 控制系統的組成
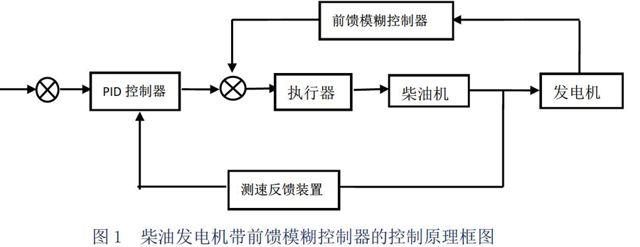
系統主要由前饋模糊控制器、PID控制器、執行器、柴油機(原動機)和測速反饋裝置組成。如圖1所示。
傳統的柴油發電機調速系統是由測速裝置測量柴油機的轉速,反饋給PID控制器。根據給定的轉速值進行比較,并輸出控制信號給到執行機構(油門閥),通過調整油門閥齒條的閥位,控制柴油機的給油量,以此來穩定柴油機的轉速。
用傳統PID控制器取代機械式的離心式調速器,可以減少由于柴油機機組機理帶來的干擾,能精確的控制柴油機的油門大小,提高柴油使用效率。再加入前饋控制器,使得控制效果更為準確,大大增加了調速器的響應速度[2]。
2.2 控制系統的原理
前饋控制又稱擾動補償,它與反饋控制原理完全不同,是按照引起被控對象參數變化的干擾大小進行調節。在這種調節系統中要直接測量負載干擾的變化,當干擾剛剛出現并能被測出時,調節器就能發出調節信號使調節量做相應的變化,使兩者在被調量發生偏差之前抵消。因此,前饋調節對干擾的克服比反饋調節更為及時[3]。對于整個柴油發電機組來說,它是一個慣性系統,由于機組存在熱力學、機械、電磁等過程的特性,機組表現出較大的滯后性,導致當功率不平衡已經出現時,轉速不能突變,轉速反饋控制器的偏差信號不能立即產生,經過一定的延時,速度變化足夠大時,控制器才會根據系統偏差給出較大的控制量。很顯然,在發電機組轉速控制中,單純的轉速反饋控制對負載的擾動不夠靈敏,有著明顯的滯后性,這就使得系統動態偏差不能及時減小,延長了系統的整個動態調整時間。所以,在柴油發電機調速控制系統中加入前饋控制器,能更好的響應負載變化所引起的功率不平衡,穩定柴油機轉速[4]。
本文采用雙輸入單輸出的二維模糊控制器。柴油發電機組在運行時,當負載發生變化,輸出轉矩與阻轉矩會有差值,導致柴油機轉速發生變化。同時,發電機的輸出功率也會發生變化。若假定發電機電壓由勵磁系統保持電壓始終穩定,則有功功率的變化取決于發電機輸出電流的有功分量的變化。在負載變化時,電流的變化是響應最快的。因此本文以發電機輸出電流的有功分量及其變化量作為模糊控制器的輸入,第一時間響應負載變化所引起的轉速變化。通過模糊控制器,不經過傳統PID控制器,早一步控制柴油的油門閥齒條的位移,使得發電機組的輸出轉矩等于阻轉矩,達到穩定柴油機轉速的控制目標。在模糊控制器中建立模糊控制規則,使用if..and...then...語句編輯模糊控制規則。為了便于說明,在本文中,發電機輸出電流指的有功電流,即模糊前饋控制器的輸入變量選擇發電機輸出電流i及其變化量ic。執行機構旋轉角度對應了油門閥齒條的位移,所以模糊控制器的輸出信號w選擇油門閥齒條的位移。如圖所示是二維模糊前饋控制器的結構原理圖。
假設發電機輸出電流最大為IMAX,則輸入變量i的基本論域為[0,IMAX]。另一輸出變量ic的基本論域為[-IMAX,IMAX]。其中ic=ik-ik-1,ic為本次采集值與前次采集值之差。輸出變量w的基本論域為[-L,L],L為油門閥的位移量[5]。
模糊規則是建立于專家經驗的基礎上的,可以根據簡化的發電機負荷與油門閥齒條的位移關系,得出相應的模糊規則。
(1)當發電機負載增大時,發電機的有功電流增大,則執行器的控制信號w應增大,即增大發電機的供油量,使發電機的轉速穩定,負載增加的越大,執行器的控制信號w應越大;當發電機負載減小時,發電機的有功電流減小,則執行器的控制信號w應減小,即減小發電機的供油量,使發電機的轉速穩定,負載增加的越小,執行器的控制信號w應越小。
(2)系統存在死區,比如在空載時,有功電流i為S時,電流趨勢ic不會出現FB、FM的狀態;或者當發電機短路故障,有功電流i為B時,電流趨勢ic不會出現ZM、ZB的狀態。由于模糊控制規則是根據專家經驗而來,對于死區的控制研究還存在較大的不足,所以死區狀況在模糊控制規則表中用“-”表示。
模糊規則表如表2所示:
由表2可以得出17條if...and...then...的模糊規則。
(1)IF(i is S)and(ic is FS)then(w is FS)
(2)If(i is S)and(ic is O)then(w is O)
(3)If(i is S)and(ic is ZS)then(w is ZS)
(4)If(i is S)and(ic is ZM)then(w is ZM)
(5)If(i is S)and(ic is ZB)then(w is ZB)
(6)If(i is M)and(ic is FB)then(w is FB)
(7)If(i is M)and(ic is FM)then(w is FM)
(8)If(i is M)and(ic is FS)then(w is FS)
(9)If(i is M)and(ic is O)then(w is O)
(10)If(i is M)and(ic is ZS)then(w is ZS)
(11)If(i is M)and(ic is ZM)then(w is ZS)
(12)If(i is M)and(ic is ZB)then(w is ZM)
(13)If(i is B)and(ic is FB)then(w is FM)
(14)If(i is B)and(ic is FM)then(w is FS)
(15)If(i is B)and(ic is FS)then(w is FS)
(16)If(i is B)and(ic is O)then(w is O)
(17)If(i is B)and(ic is ZS)then(w is ZS)
3.控制系統的設計與仿真
本文采用Matlab軟件進行仿真實驗,用Matlab軟件中的Fuzzy控件,編輯發電機模糊前饋控制器。模糊控制器是二維控制器,在FIS編輯界面內確定輸入變量i及ic,以及輸出量w。如圖5所示。在第二節內已經描述過每個輸入變量和輸出量的論域值。為了方便在Matlab中計算,我們選取輸入變量i的論域為[0 1],輸入變量ic的論域為[-1 1],輸出量w的論域為[-1 1]。如圖6所示。
在模糊控制規則中,輸入由表2所得出的控制規則。如圖7所示。在FIS編輯中,可以通過規則查看器查看模糊控制器內部推理過程。它可以顯示正在使用的規則,也可以隸屬度函數的圖像以及其對應的結果,設計人員可以詳細的看到規則控制器中的每一個結果。如圖8所示。
設計人員也可通過曲面觀察器查看整個系統的輸出曲面。可以很直觀的看到整個輸入集的變化所對應的輸出變化,并對整個系統的控制規則不斷的修改及優化。如圖9所示。
參考文獻:
[1]孫培延,李斌等. 船舶柴油機.大連:大連海事大學出版社.
[2]劉大鵬. 基于可變論域模糊控制的柴油機調速器研究:(碩士學位論文).哈爾濱:哈爾濱理工大學,2009.
[3]盧賢基. 船舶發電柴油機調速系統的研究與設計:(碩士學位論文).大連:大連海事大學,2013
[4]龐中華,崔紅.系統辨識與自適應控制MATLAB仿真. 北京:北京航空航天大學出版社.
[5]李云伍,烏建中,劉彥伯等. 內燃發電機組頻率前饋補償PID神經網絡控制.內燃機學報,2007,25(4):279-283.