應用于超聲清洗的步進電機直線運動定位系統
2015-10-21 19:39:14劉寧
科技致富向導 2015年6期
劉寧
【摘 要】步進電動機用脈沖信號控制,步距角和轉速不受電壓波動和負載變化的影響,僅與脈沖頻率成正比,通過改變脈沖頻率的大小可以調節電機轉速,并能實現快速起動、制動、反轉,不需要機械制動裝置,而且有位置保持能力,不經減速器也可低速運行。主要用于數字控制系統中,精度高,運行可靠。配合相應的傳感器,可實現閉環控制。
【關鍵詞】步進電機;步距角;閉環控制;脈沖信號
1.應用背景
在超聲波清洗機的工作過程中,為了提高工作效率,減輕工人工作負荷,實現清洗過程自動化,設計了該直線運動定位系統。該系統可以實現沿直線方向的往復運動,運動過程中任意時刻,可改變運動方向及運動速度,亦可快速定位到運動范圍內的特定位置。
2.硬件及結構組成
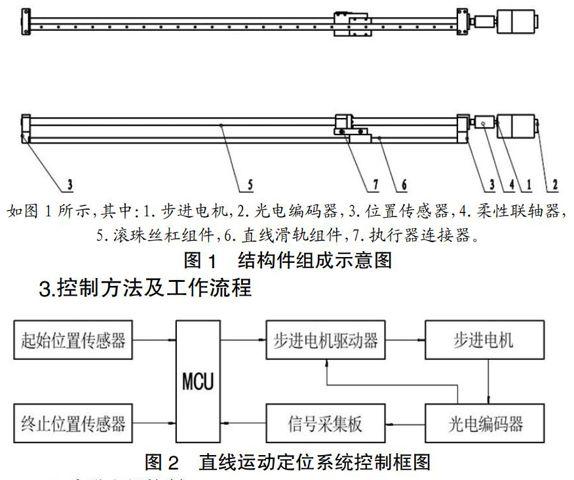
該系統硬件組成主要包括:單片機、步進電機驅動器、步進電機、光電編碼器、位置傳感器、柔性聯軸器、滾珠絲杠組件、直線滑軌組件、執行器連接器。
如圖1所示,其中:1.步進電機,2.光電編碼器,3.位置傳感器,4.柔性聯軸器,5.滾珠絲杠組件,6.直線滑軌組件,7.執行器連接器。
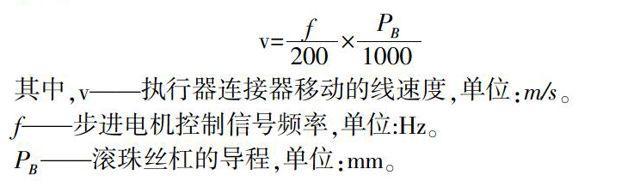
3.控制方法及工作流程
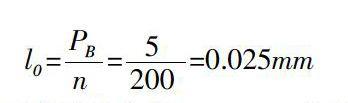
3.1步進電機控制
選用兩項四線混合步進電機,步進電機的步距角為1.8°。步進電機旋轉一周所需的脈沖數為:n=360°/1.8°=200。步進電機控制信號由單片機根據不同的轉速要求發出相應頻率的脈沖給步進電機驅動器,步進的及驅動器根據脈沖的頻率驅動電機。電機旋轉的同時帶動光電編碼器同步旋轉,光電編碼器發出的信號反饋給步進電機驅動器完成整個閉環控制。步進電機驅動器通過光電編碼器反饋信號與自身發出的脈沖信號對比,可及時發現步進電機的過沖、丟步等運行錯誤并自動完成修正。
3.2執行器連接器位置標定
為實現定位至運動范圍內的特定位置的功能,需要沿導軌方向在運動范圍內為步進電機建立一維坐標系,并為執行器連接器所在的位置標定對應的坐標。標定方法如下:
將執行器連接器向起始位置移動,當起始位置傳感器發出信號后,步進電機停止轉動。該位置記為起始位置,編碼為0。將執行器連接器向終止位置移動,當終止位置傳感器發出信號后,步進電機停止轉動。該位置記為終止位置,編碼為光電編碼器從起始位置到終止位置記錄的編碼數,記為N0。使用1000線光電編碼器,則從起始位置運動至距離起始位置1(單位:mm)對應的步進電機脈沖數為:
3.3直線運動系統工作流程
4.總結
通過使用位置傳感器和光電編碼器實現了執行器連接器運動邊界標定,執行器連接器精確定位。在直線滑軌保證直線運動方向精度的基礎上,使用滾珠絲杠和步進電機及光電編碼器組成的閉環控制系統實現了執行器連接器的高精度移動。此直線運動定位系統不受運動范圍限制,運動范圍改變僅需對系統坐標系重新標定;在橫向和縱向分別布置,亦可實現二維空間的精確定位及移動。 [科]
【參考文獻】
[1]陸萍,葛培琪,孟劍鋒.機械設計基礎.山東:科學技術出版社,2003.