
模糊自適應(yīng)PID控制的移相全橋變換器設(shè)計(jì)與仿真
2015-10-22 21:06:22趙文春王博劉勝道鄭云波
現(xiàn)代電子技術(shù) 2015年19期
趙文春 王博 劉勝道 鄭云波

摘 要: 針對(duì)普通PID控制難以應(yīng)付移相全橋DC/DC變換器時(shí)變非線性的不足,提出采用模糊自適應(yīng)PID控制的方法。該方法基于誤差信號(hào),對(duì)應(yīng)模糊控制規(guī)則得出PID參數(shù)的實(shí)時(shí)修改量,對(duì)復(fù)雜系統(tǒng)具有一定的自適應(yīng)性。利用Matlab/Simulink工具箱進(jìn)行了普通PID控制和模糊自適應(yīng)PID控制的系統(tǒng)建模,并對(duì)輸入電壓和負(fù)載突變情況進(jìn)行了仿真。仿真結(jié)果驗(yàn)證了系統(tǒng)的可行性,通過(guò)對(duì)比表明模糊自適應(yīng)PID控制在啟動(dòng)、負(fù)載突變等情況下動(dòng)、靜態(tài)性能均優(yōu)于普通PID控制,提高了系統(tǒng)性能。
關(guān)鍵詞: 移相全橋; DC/DC變換器; PID控制; 模糊控制
中圖分類號(hào): TN710?34; TP273+.4 文獻(xiàn)標(biāo)識(shí)碼: A 文章編號(hào): 1004?373X(2015)19?0110?04
Abstract: Since the traditional PID control is hard to solve time?varying nonlinear problem of phase?shifted full?bridge DC/DC converter, the method of using self?adaptive fuzzy?PID control is proposed. The real?time modifiers of PID parameters are obtained by fuzzy control rules corresponding to error signal. This method has certain adaptivity to complex system. The traditional PID control and self?adaptive fuzzy?PID control were conducted with system modeling by Matlab/Simulink toolbox, and the input voltage and load changes were simulated. The simulation results verify that this system is feasible. The static and dynamic performances of self?adaptive fuzzy?PID control are better than the traditional PID control in the situation of start?up and load changes. System performances were improved.
Keywords: phase?shifted full?bridge; DC/DC converter; PID control; fuzzy control
0 引 言
開(kāi)關(guān)電源是利用現(xiàn)代電力電子技術(shù),通過(guò)對(duì)開(kāi)關(guān)管開(kāi)關(guān)時(shí)間的控制,維持穩(wěn)定輸出的一種電源。因其具有小型、輕量和高效率的優(yōu)點(diǎn),已被廣泛應(yīng)用在航空、航天、鐵路、通信、工業(yè)儀器儀表等領(lǐng)域。開(kāi)關(guān)電源是一個(gè)時(shí)變非線性系統(tǒng),在實(shí)際應(yīng)用中難以建立精確的數(shù)學(xué)模型,PID控制通常進(jìn)行近似化處理,因此難以應(yīng)付電源輸入突變、負(fù)載突變等復(fù)雜情況,控制效果差強(qiáng)人意。模糊控制針對(duì)系統(tǒng)參數(shù)的攝動(dòng)具有較好的魯棒性,能適應(yīng)對(duì)象時(shí)變非線性的特點(diǎn),但是它控制較為粗糙,同時(shí)缺少積分作用,尤其在系統(tǒng)平衡點(diǎn)附近控制精度難以讓人滿意,因而把兩者結(jié)合起來(lái)成為必然趨勢(shì)。
移相控制ZVS PWM DC/DC全橋變換器電路結(jié)構(gòu)簡(jiǎn)潔,可實(shí)現(xiàn)高功率變換,同時(shí)逆變橋開(kāi)關(guān)管的電壓和電流應(yīng)力也得到了有效降低。逆變橋開(kāi)關(guān)管采用PWM 移相控制,結(jié)合軟開(kāi)關(guān)技術(shù),利用電感和電容的諧振可以實(shí)現(xiàn)恒定頻率的零電壓開(kāi)關(guān),從而降低開(kāi)關(guān)損耗,提高電源效率,解決了硬開(kāi)關(guān)的開(kāi)關(guān)損耗大、開(kāi)關(guān)噪聲大等問(wèn)題,并且可以通過(guò)控制移相角改變開(kāi)關(guān)管導(dǎo)通占空比,從而方便地調(diào)節(jié)輸出電壓大小。
移相全橋電路結(jié)構(gòu)簡(jiǎn)單,和硬開(kāi)關(guān)全橋電路相比僅僅增加了一個(gè)諧振電感。控制獨(dú)特、開(kāi)關(guān)損耗功率小、能夠應(yīng)用于高頻大功率等場(chǎng)合,開(kāi)展對(duì)該變換器智能控制的研究具有現(xiàn)實(shí)意義。而目前國(guó)內(nèi)已有文獻(xiàn)介紹相關(guān)內(nèi)容,文獻(xiàn)[1]針對(duì)Buck電路小信號(hào)模型建立的傳遞函數(shù)進(jìn)行了研究,文獻(xiàn)[2]依據(jù)倍流整流移相全橋的小信號(hào)模型進(jìn)行了模糊PID仿真研究。但目前研究只是籠統(tǒng)依據(jù)其變換器的小信號(hào)模型進(jìn)行研究,未具體針對(duì)變換器的實(shí)際仿真模型展開(kāi)研究,失去了模糊控制本身不需要精確數(shù)學(xué)模型也能實(shí)現(xiàn)較好控制效果的優(yōu)勢(shì),實(shí)踐指導(dǎo)意義有限。為此,本文利用Matlab/Simulink對(duì)移相全橋ZVS進(jìn)行了系統(tǒng)建模,控制方式分別采用PID控制與模糊自適應(yīng)PID,并進(jìn)行了性能比較。
1 移相全橋ZVS變換器主電路結(jié)構(gòu)
移相全橋ZVS全橋變換器主電路拓?fù)浣Y(jié)構(gòu)如圖1所示。由超前橋臂(開(kāi)關(guān)管Q1和Q2)和滯后橋臂(開(kāi)關(guān)管Q3和Q4)組成逆變橋,開(kāi)關(guān)管兩邊分別并聯(lián)諧振電容(或漏源極電容)和反并聯(lián)二極管(或開(kāi)關(guān)管的體二極管),[R]為模擬電路中線路實(shí)際損耗的電阻,[Lr]是諧振電感(包括串聯(lián)電感和變壓器原邊漏感),T是高頻變壓器。副邊采用全波整流,[D1]和[D2]是輸出整流二極管,[Lf]和[Cf]組成了輸出濾波電路。超前橋臂超前滯后橋臂一個(gè)相位,即移相角。通過(guò)將輸出濾波電容的電壓采樣信號(hào)與系統(tǒng)設(shè)置的輸出濾波電容的指令電壓進(jìn)行比較,得到誤差信號(hào),經(jīng)過(guò)模糊控制器進(jìn)行 PID 調(diào)節(jié),動(dòng)態(tài)地調(diào)節(jié)這個(gè)移相角來(lái)改變開(kāi)關(guān)管的導(dǎo)通時(shí)間,從而調(diào)節(jié)輸出電壓。
2 模糊自適應(yīng)PID控制器的設(shè)計(jì)
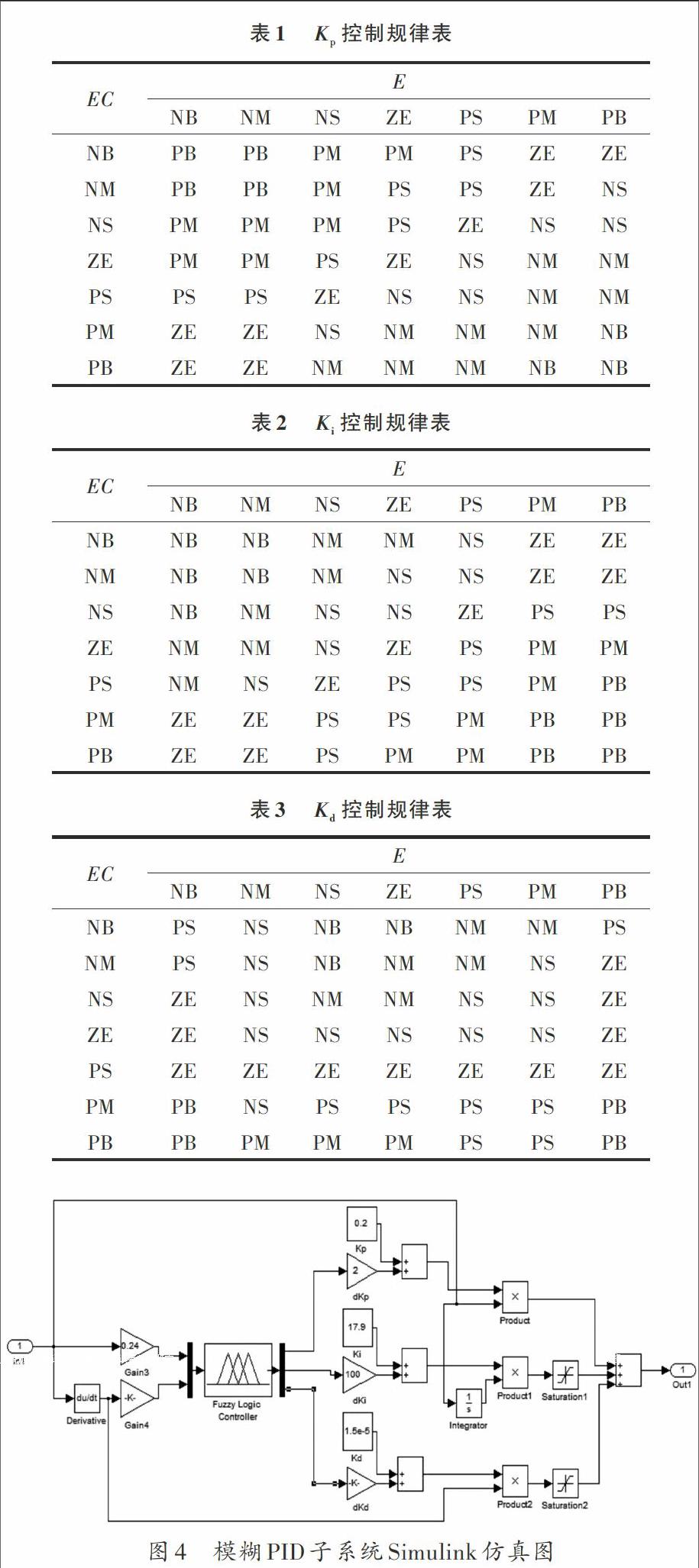
模糊控制器選擇基于誤差信號(hào)的兩輸入、三輸出結(jié)構(gòu)。以輸出電壓參考值與實(shí)際值的誤差[E]及其變化率[EC]為輸入,PID控制器參數(shù)調(diào)整量[ΔKp,][ΔKi,][ΔKd]為輸出。將初始設(shè)定的PID參數(shù)與模糊控制器輸出的PID調(diào)整信號(hào)進(jìn)行計(jì)算,得到實(shí)時(shí)的PID參數(shù),以更好地適應(yīng)系統(tǒng)變化,實(shí)現(xiàn)較好的系統(tǒng)靜、動(dòng)態(tài)性能。endprint
2.1 常規(guī)PID控制初始參數(shù)確定
在Matlab中構(gòu)建了電壓環(huán)反饋的仿真模型,依據(jù)傳統(tǒng)的PID經(jīng)驗(yàn)調(diào)節(jié)按以下步驟進(jìn)行參數(shù)整定。
2.1.1 確定初始比例系數(shù)[Kp0]
確定初始比例系數(shù)[Kp0]時(shí),首先取消積分、微分項(xiàng),將PID設(shè)定為純比例調(diào)節(jié)。允許最大值的60%設(shè)定為系統(tǒng)的輸入,增大比例系數(shù)不斷調(diào)試系統(tǒng)至出現(xiàn)振蕩,再減小至振蕩消失,設(shè)定模糊自適應(yīng)PID控制的初始比例系數(shù)[Kp0]為當(dāng)前值的0.6~0.7倍。
2.1.2 確定初始積分系數(shù)[Ki0]
初始比例系數(shù)確定后,微分項(xiàng)設(shè)置為0,給積分時(shí)間常數(shù)設(shè)置一個(gè)較大的初值,逐漸減小再逐漸增大,使系統(tǒng)出現(xiàn)振蕩再逐漸消失,設(shè)定初始積分常數(shù)為當(dāng)前值的1.6~1.8倍,可得初始積分系數(shù)。
分別在系統(tǒng)空載和帶載的情況下進(jìn)行聯(lián)調(diào),觀察靜、動(dòng)態(tài)指標(biāo)是否符合系統(tǒng)要求,適當(dāng)增加微分項(xiàng),確定初始微分系數(shù)[Kd0,]再對(duì)PID參數(shù)進(jìn)行適當(dāng)調(diào)整以滿足性能指標(biāo)。結(jié)合仿真過(guò)程,PID參數(shù)最后設(shè)定為[Kp0]=0.2,[Ki0]=17.9,[Kd0]=1.5e-5。
2.2 模糊控制器輸入輸出接口設(shè)計(jì)
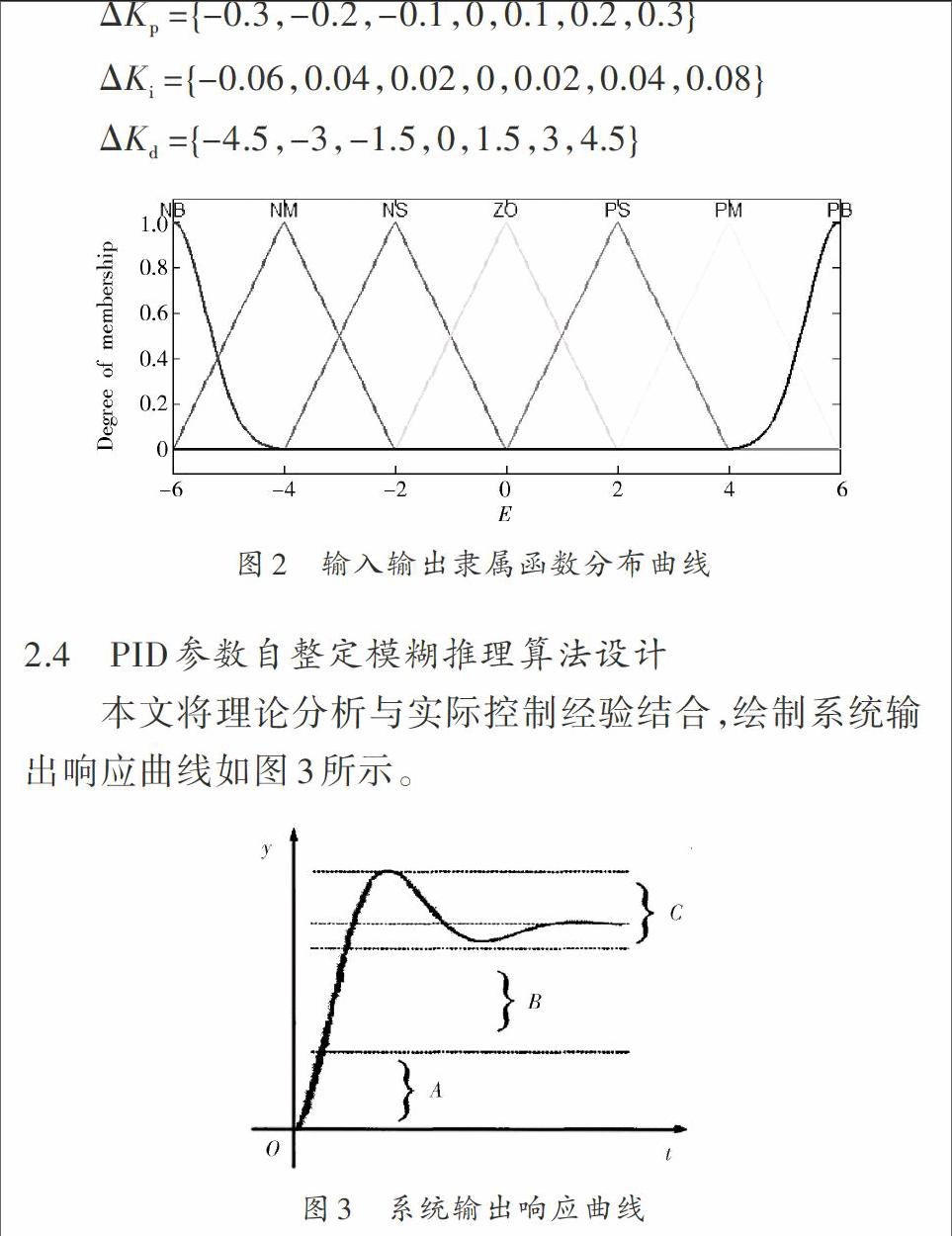
2.3 模糊變量隸屬函數(shù)確定
隸屬函數(shù)的選擇沒(méi)有固定的規(guī)則和模式,對(duì)控制效果的影響遠(yuǎn)沒(méi)有論域上各[F]子集分布和相鄰子集隸屬函數(shù)重疊交叉情況等影響大。本文采用三角形隸屬函數(shù),輸入輸出隸屬函數(shù)分布曲線如圖2所示。
從圖7可以看出,傳統(tǒng)PID控制的輸出電壓在24.1~31.3 V之間波動(dòng),恢復(fù)時(shí)間為0.25 s;突變時(shí)模糊自適應(yīng)PID控制系統(tǒng)輸出電壓波形最大值為27.9 V,恢復(fù)時(shí)間約為0.12 s,調(diào)節(jié)過(guò)程平滑且無(wú)波動(dòng)。
4 結(jié) 論
本文介紹了模糊自適應(yīng)PID控制系統(tǒng)的設(shè)計(jì)過(guò)程,對(duì)普通PID控制和模糊自適應(yīng)PID控制進(jìn)行了系統(tǒng)建模,并對(duì)系統(tǒng)啟動(dòng)和負(fù)載突變等情況進(jìn)行了仿真對(duì)比,結(jié)果驗(yàn)證了設(shè)計(jì)的正確性,表明模糊自適應(yīng)PID控制下的系統(tǒng)超調(diào)量小,調(diào)節(jié)時(shí)間短,遇到擾動(dòng)后動(dòng)態(tài)降落和恢復(fù)時(shí)間小,調(diào)節(jié)過(guò)程平滑的特點(diǎn),具有更好的靜、動(dòng)態(tài)性能,更能適合高性能要求的場(chǎng)合。
注:本文的通訊作者為王博。
參考文獻(xiàn)
[1] 王翀,劉文生.開(kāi)關(guān)電源模糊PID控制器的設(shè)計(jì)與仿真[J].通信電源技術(shù),2011,28(2):40?43.
[2] 謝勇,孟杰,黃麗娟,等.倍流整流移相全橋DC/DC變換器模糊PI控制[J].電力電子技術(shù),2012,46(7):28?30.
[3] 黃碩.智能控制移相全橋軟開(kāi)關(guān)電源的研究[D].沈陽(yáng):東北大學(xué),2009.
[4] 石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清華大學(xué)出版社,2008.
[5] 封琦,王宏華.開(kāi)關(guān)穩(wěn)壓電源模糊控制器設(shè)計(jì)與仿真[J].機(jī)械制造與自動(dòng)化,2006,35(1):123?125.
[6] SHAFIK Z, MAHMOUD I, STEPHEN J, et al. Osborne efficiency improvement techniques of high current low voltage rectifiers using MOSFET [J]. IEEE Electrical and Electronic Engineering, 2009, 33(11): 52?56.
[7] MAURYA R, SRIVASTAVA S P, AGARWAL P. High frequency isolated LLC DC?DC resonant converter for low voltage high current [J]. IEEE Indian Institute of Technology, 2012, 8(12): 157?161.
[8] 阮新波.脈寬調(diào)制DC/DC全橋變換器的軟開(kāi)關(guān)技術(shù)[M].北京:科學(xué)出版社,2013.
[9] 梁永清,黃志強(qiáng).雙閉環(huán)控制的移相全橋軟開(kāi)關(guān)變換器的研究[J].現(xiàn)代電子技術(shù),2014,37(8):156?158.
[10] 李宏,榮軍.峰值電流控制在移相全橋變換器中的技術(shù)研究[J].電力電子技術(shù),2008,42(1):81?83.endprint
