航天器人控交會對接系統工效學要求與評價技術研究及實踐
2015-10-24 05:39:25黃偉芬田志強王春慧
載人航天 2015年6期
黃偉芬,田志強,王春慧
(中國航天員科研訓練中心人因工程重點實驗室,北京 100094)
航天器人控交會對接系統工效學要求與評價技術研究及實踐
黃偉芬,田志強,王春慧
(中國航天員科研訓練中心人因工程重點實驗室,北京 100094)
從人-系統整合的角度分析提出了工效學要求指標體系,通過試驗研究確定了工效學要求,基于小樣本理論和可靠性試驗方法建立了復雜人控回路工效學評價方法。對人控交會對接系統工程設計開展了系統級評價試驗,重點評估了航天器顯控系統與人的能力匹配性;結合神舟八號與天空一號自動對接過程中下傳的電視圖像分析確定了人控交會對接適宜的光照環境;通過神舟九號和神舟十號載人航天飛行任務中人控交會對接試驗,驗證了工效學要求的合理性和工效學評價結果的正確性。最后提出了我國空間站任務階段航天器人控交會對接系統工效學研究的重點。
航天器;交會對接;人工控制;工效學;評價技術
1 引言
交會對接技術與載人天地往返、出艙活動并稱載人航天的三大基本技術[1],是載人航天發展過程中解決空間站組裝、乘員輪換、貨物補給、載人登月的先決條件,幾乎在所有的載人航天任務中都要使用[2]。
自20世紀60年代以來,美、俄共進行了300多次的空間交會對接任務[1,3]。美、俄交會對接任務的經驗表明,人控交會對接是自動控制失效時保障任務順利完成的有力輔助手段。美國在“阿波羅”、天空實驗室、航天飛機、空間站、“獵戶座”飛船等各項載人航天計劃中不斷改進和完善交會對接技術[3-6]。與自動控制相比,人工控制有了航天員的參與,更能靈活應變解決緊急、復雜的問題,提高了系統的可靠性,同時提高了交會對接任務成功的概率[7]。因此,人控交會對接過程中追蹤航天器的控制特性,顯示、控制界面的工效設計水平,以及顯控系統整合與人的能力匹配性將很大程度上決定了人控交會對接操作的精度和成敗。工效學要求作為工程設計的輸入條件,與工效學迭代評價是確保航天器人控交會對接系統工程設計信息顯示清晰準確、操控系統可控、任務設計合理、負荷適宜的重要手段。
2 工效學要求體系
人控交會對接過程中,追蹤航天器的儀表系統為航天員呈現艙外攝像機拍攝到的目標航天器圖像,航天員根據識別的目標航天器的位置和姿態映像到追蹤航天器的位姿偏差,并利用控制手柄消除之。追蹤航天器動力系統響應手柄信號,觸發發動機點火,追蹤航天器的空間位置和姿態發生改變,進而間接引起顯示器上目標航天器的圖像變化。在此過程中航天員需要不斷觀察儀表系統顯示的圖像、圖形和數值信息并做出判斷,而后操控追蹤航天器逐步接近目標航天器,確保兩個航天器間相對位姿、相對速度在對接的允許條件范圍之內。這樣,人控交會對接構成了一個典型的“人在回路(human-in-the-loop)”的復雜控制過程,如圖1所示。
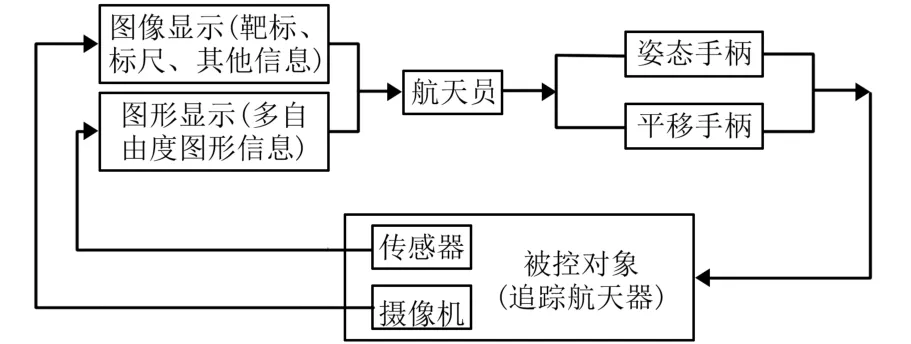
圖1 人控交會對接控制回路示意圖Fig.1 Schematic diagram of control loop in MCRVD
在航天員-航天器-空間環境構成的復雜系統中,人機界面設計不當可能會導致航天員操作失誤,進而影響到任務的成敗,因此,為確保航天員安全、高效地完成人控交會對接任務,追蹤航天器人控交會對接顯控界面應既滿足航天員判讀、控制能力要求,也應使航天員的工作負荷適宜。按照系統論的思想,需要從人-系統整合的角度出發,“以航天員為中心”分析人控交會對接過程中涉及的工效學問題。結合國外人控交會對接工程實踐經驗和我國載人航天器工程設計的實際,梳理出由人控交會對接顯示系統、控制系統、航天員構成的“人控回路”中的工效學要素,如圖2所示。
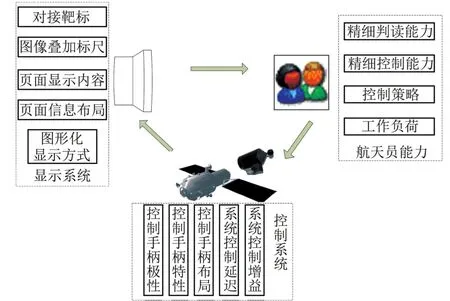
圖2 人控交會對接系統設計中的工效學要素Fig.2 Ergonomics elements of engineering design in MCRVD system
2.1 顯示系統
1)對接靶標
安裝在目標航天器上的對接靶標是航天員進行兩航天器相對位置和相對姿態關系判讀的主要依據之一。對接靶標的大小、顏色、亮度、靶標底盤的光反射系數、突出的十字架長度及其與靶標底盤刻線間的投影關系、對接靶標在圖像顯示頁面上的大小、清晰度等等都非常重要。兩種可能的靶標設計如圖3所示。
2)圖像疊加標尺
圖像顯示頁面上需要疊加輔助判讀的標尺,它與對接靶標一起構成了兩航天器空間關系的幾何映射。標尺的顏色、亮度、刻線粗細、刻線間距、刻度等級,及其與目標航天器圖像在顯示頁面上的前后位置關系等要素都關系到航天員判讀的精度。
3)頁面顯示內容
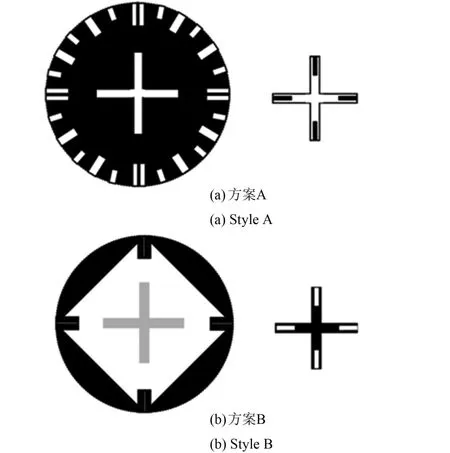
圖3 人控交會對接的靶標設計Fig.3 Cross drone image design of MCRVD
航天員在觀察電視圖像的同時,還需要關注兩飛行器的相對距離、相對速度、相對姿態、相對位置、燃料消耗、對接時間、對接機構狀態等數據信息,考慮到顯示器頁面大小,有些信息是無法全部顯示的,能夠顯示的內容以及這些信息的顏色、大小、對比度、字體、數字精度等需要工效學專家與工程師一起分析確定。
4)頁面信息布局
確定了頁面顯示內容后,文字、字符、數字、圖像等信息如何在有效的空間里合理布局(如圖4),確保航天員快速準確的識別,應該從人的認知特性出發加以解決。
5)圖形化顯示方式
目標航天器電視圖像是在兩飛行器相距較
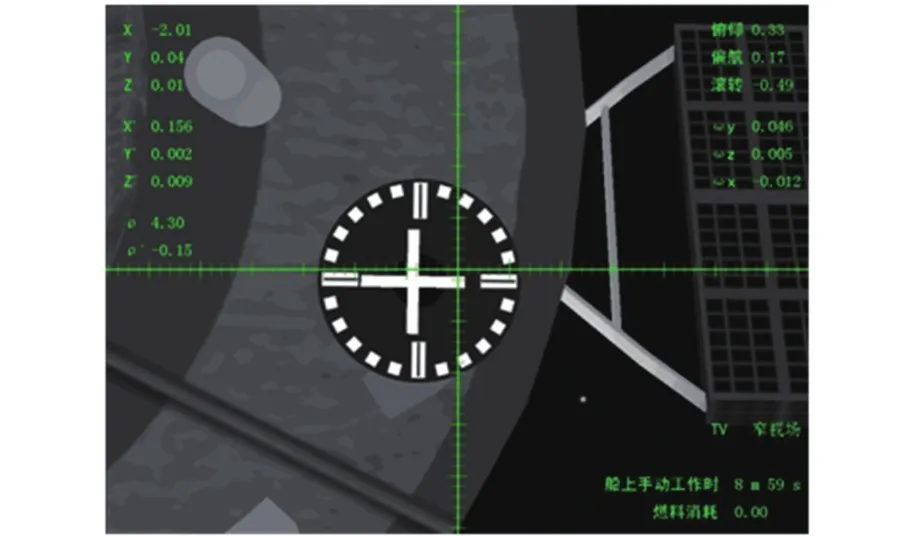
圖4 人控交會對接圖像信息顯示方案之一Fig.4 One display plan of graphic information in MCRVD
近,可以目視觀察的條件下為航天員提供的一種信息顯示方式。當兩飛行器相距較遠,還需要靠雷達或衛星提供相對位置和姿態信息時,需要以圖形化的顯示方式直觀地為航天員提供參考信息。追蹤航天器位置和姿態的6自由度信息如何約束在一個圖形中合理表達,圖形的大小、顏色、亮度、刻度形式、位姿象形物形式及相關信息的頁面布局等設計難度很大。如圖5所示。
2.2 控制系統
1)控制手柄極性
平移和姿態兩個控制手柄輸出電信號,觸發追蹤航天器的動力系統點火,繼而引起飛船的位置和姿態改變。位置信息包括:前后、上下、左右3個自由度;姿態信息包括:滾轉、俯仰、偏航3個自由度。控制手柄設計的形式、安裝方式、控制極性-追蹤航天器動作的物理意義-航天員認知的一致性,會影響到航天員的操作效率。不合理的設計將會導致航天員工作負荷的大大增加,緊急狀態下導致誤操作。
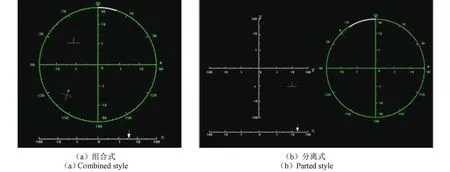
圖5 飛船多自由度圖形化信息顯示示意圖Fig.5 Schematic diagram of multi-degree graphic information display in spacecraft
2)控制手柄特性
控制手柄軸的轉動范圍、手柄轉動桿長度、死區(間隙)大小、限位設計、回位設計、信號輸出、手柄頭形狀/尺寸、操作力特性等手柄自身特性也是工程設計需要考慮的工效學要素。
3)控制手柄布局
平移和姿態控制手柄的安裝位置與顯示頁面中有關平移和姿態的信息布局是密切關聯的,控制手柄頭是否落在人的最舒適操控范圍內、控制手柄與其他控制器的空間干涉也需要同步考慮。
4)系統控制延遲
系統控制延遲指從控制手柄輸出信號到電視圖像中的目標航天器發生變化的周期。這個延遲周期與發動機的安置位置、動力系統響應特性、圖像信息傳輸速率等都有關聯。系統延遲過大將會給航天員帶來錯覺,使得控制輸入與輸出失調。
5)系統控制增益
系統控制增益與航天器動力學響應特性有關。平移手柄和姿態手柄的單點脈沖周期、持續作用時間對應的動力學輸出對于交會對接不同控制階段的要求是不盡相同的。手柄的信號輸出量對人的控制能力的影響反映在近距離下的控制精度要求更高。
2.3 航天員能力
1)精細判讀能力
對接靶標圖像、多自由度圖形信息顯示內容、顯示方式以及數值顯示精度、刷新頻率要與航天員的判讀能力相匹配。顯示內容不全給航天員帶來信息的缺失,顯示內容過多給航天員帶來信息搜索方面的負荷。
2)精細控制能力
人控交會對接最基本的特征是航天員通過控制平移和姿態手柄實現兩個飛行器的交會對接,對接過程中航天員的精細控制能力與追蹤航天器的動力學特性密切相關。人控交會對接時兩個航天器的初始位姿偏差、系統控制延遲、控制增益要與人的基本控制能力相匹配。
3)控制策略
自控交會對接控制系統有一套程序化的控制方式以確保兩個航天器能夠實現對接。人控交會對接在遵循基本的控制原則基礎上,航天員會依據自身的控制習慣、控制能力建立獨特的控制方法[8]。選取能反映控制策略優劣的作業績效指標,尋找最佳控制策略,對于降低對接過程中的不合理動作、降低燃料消耗和對接時間、提高對接精度大有裨益。
2.4 其它要素
人控交會對接是一個強度較大的腦力活動。工作負荷的大小不但受任務難度高低的影響,同時航天員的操作能力、信息顯示的合理性,控制策略的合理性、飛行器的控制特性與航天員的操作能力匹配性等因素也同時起作用。因此,篩選和建立與工作負荷相關性高的績效指標和測試方法非常重要[9-11]。
2.5 工效學要求實驗研究
人控交會對接顯示、控制系統工效學要求是工程設計的依據和約束條件。中國航天員科研訓練中心(以下簡稱航天員中心)利用MC-1交會對接訓練模擬器、人控交會對接原型實驗系統、人控交會對接工效實驗平臺,針對上述工效學問題開展了近7500余人次的實驗研究,取得了豐碩的實驗結果[12-18]。例如,針對航天員手動控制與信息顯示心理相容性問題,從績效和認知兩個層面揭示了手柄控制極性與圖像信息反饋的認知一致性映射關系,提出了追蹤航天器人控交會對接的手柄控制極性定義,該極性定義可將多自由度控制的同時性提高60%~76%,有效地避免應急狀態下操作失誤;還有工效學設計的對接靶標有效地將姿態對接精度在±2°以內的比例提高24%,平移對接精度在±5 cm內的比例提高12%。通過實驗結果提煉出來的工效學要求中,涉及顯示系統的工效學要求63項,量化指標率達到42%,涉及控制系統的工效學要求48項,量化指標率達到61%,這些量化的工效學指標既是約束工程設計的要素,也是開展工效學評價的重要依據。
3 評價技術
3.1 單機產品的工效學評價方法
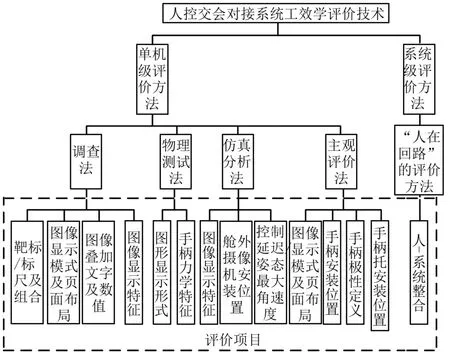
圖6 人控交會對接系統工效學評價技術體系Fig.6 Ergonomic evaluation technology structure of MCRVD system
針對載人航天器工程研制的工效學評價方法包括單機級和系統級,如圖6所示。對接靶標、艙外攝像機安裝位置、圖像信息顯示內容、圖形化顯示方式、控制手柄(力學特性、安裝位置、極性定義)、追蹤飛行器控制特性等屬于人控交會對接顯示系統、控制系統中的單機產品設計。經過載人航天工程的驗證,以下四種工效學評價方法可以解決人控交會對接系統中單機設備的可視、可達、可懂、可控的基本要求:
1)調查法:在方案設計階段,采用訪談、討論、問卷調查等方法收集被調查者(如航天員、航天員教員、工效學專家、工程人員等)對單機產品設計中的工效學問題的主觀感受和意見建議。
2)物理測試法:在專業的實驗室內利用標準測試設備、測試流程對工程產品的工效學設計指標進行測試,根據測試結果給出工效學評價結論。
3)仿真分析法:借助虛擬人、虛擬人機系統對作業空間、作業過程進行仿真分析,建立低保真度原型仿真模型,把航天員空間活動以三維的形式展示出來,以驗證工程設計方案的合理性。
4)受試者主觀評價法:記錄典型用戶對單機產品人機界面、操作時序、操作方式等體驗后的主觀感受評價問卷,確定單機產品的工效學設計的合理性。
3.2 復雜人控回路系統級評價方法
前面四種評價方法都相對比較成熟,可以有效支持相關單機項目評價的開展,但是對于系統級的需要采用“人在回路”評價方法的項目,需要重點解決兩個方面的難題:
1)回路中人的操作能力影響評價結果:對于有人參與的顯控回路,在進行人機界面評價中一個難點是如何剝離人與系統間的互相影響。由于航天員與航天器之間構成了一個整體,航天器設計的不足有可能被評價者的能力所掩蔽,也有可能由于評價者的能力不足而放大,二者互相鉸鏈不易拆分。因此建立人的操作績效綜合評價方法,對參與評價的系統中的人的操作能力和績效進行量化分析和評估是開展手控交會對接系統級工效評價的基礎。
2)評價試驗設計和技術狀態約束影響評價結果:工程研制不同于實驗研究,有進度的時間要求。由于評價試驗的周期約束,采用大樣本、多重復次數的評價模式受到制約,需要對受試者的數量和試驗次數科學裁剪,包括測試用例(任務難度)、測試樣本量的設計。為了保證評價結果的有效性,評價試驗中試驗現場技術狀態要與真實任務保持一致。
針對這兩個難題,航天員中心開展了一系列的實驗,提出了復雜人控回路中人的操控績效綜合評價模型和基于小子樣數據分析理論的“人在回路”工效學評價方法。
3.2.1 研究建立綜合績效指標體系
606例育齡期死亡婦女隨年齡升高死亡占有率逐漸升高,且45~50歲育齡期死亡婦女占有率最高。詳見表1。
人控交會對接顯控回路由航天員、顯示系統和控制系統組成,系統中各部分的相互匹配程度決定了對接任務的操作績效,很難用單一成功率指標對整個系統設計水平進行評價。因此,在眾多的指標中篩選反映操作績效的指標的方法亟待建立[19-20]。
首先通過對多因素、多水平交叉試驗狀態下操作者績效指標的變化規律、相關性、一致性等特性分析對指標進行初步篩選。試驗數據表明,人控交會對接的績效指標有明顯的階段性特征。依據此特征可將整個人控交會對接過程劃分為遠距離的追蹤控制段(平移靠攏段停泊點~20 m)、近距離的精確控制段(20 m~0 m)和對接時刻,三階段內的績效指標的敏感程度不同[14-15]。
其次采用因子分析法(Factor Analysis)[21-22]對人控交會對接過程不同階段下績效指標(包括成功率、控制時間、燃料消耗、累計偏差、平均偏差、平均速度、最大速度和進入對接準入條件的距離等)進行聚類篩選,確定敏感指標。最后采用熵值法根據各級指標的物理意義和差異程度,確定賦權值并建立了綜合績效評價模型[23-25],包含三個層面的指標:對接過程控制指標、對接時刻精度指標和對接結果指標,分別反映了人控交會對接過程以及結果的優劣程度,如圖7所示。
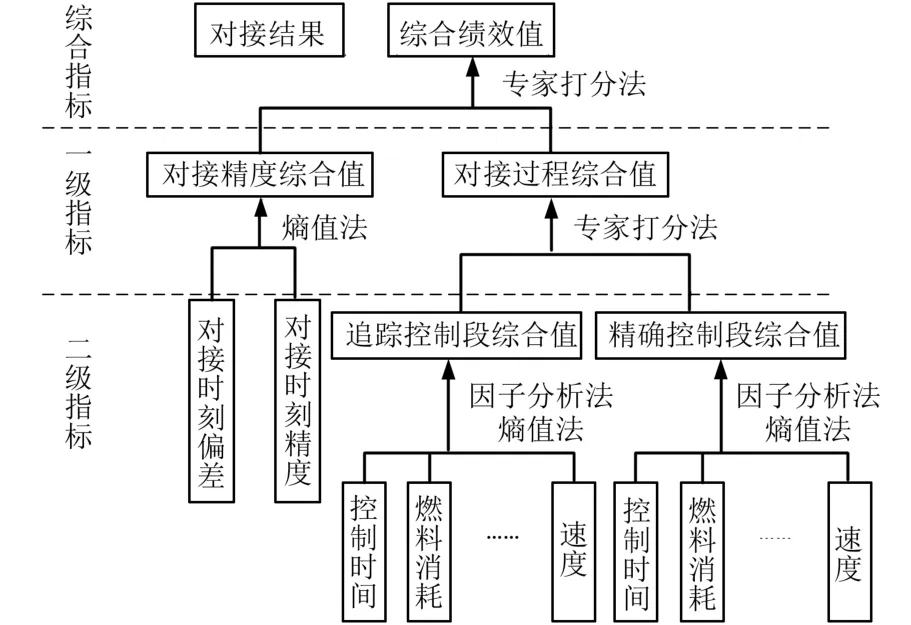
圖7 人控交會對接綜合績效評價模型Fig.7 Synthetical performance evaluation model of MCRVD
該模型利用客觀指標的規律和特性來賦權重,克服了傳統專家打分評價方法的主觀性和不穩定性。為了對指標體系和模型進行驗證,設計了不同難度、不同類型的對比驗證試驗,用于驗證指標體系和評價模型的效度和信度[15]。驗證試驗的結果證明了人控交會對接復雜人控回路綜合績效評價模型的有效性。
3.2.2 研究建立評價方法
面向工程設計的工效學評價的特點之一就是受試者、評價時間和試驗次數的約束性強。人控交會對接中航天員-航天器-航天環境三者之間互相影響、互相滲透,操作任務難度大小、受試者的能力水平、受試者操作次數等均是影響操作績效高低和穩定性的關鍵要素。
1)測試用例設計
我國交會對接任務的執行模式是首選自控對接,在自控系統故障的情況下具備航天員實施人控交會對接的能力。這種任務模式決定了自控轉人控時的初始條件不是唯一的。不同的距離、不同的位置和姿態偏差量、不同的初始速度、不同的太陽光照條件等因素的組合,會造成航天員觀察的目標航天器圖像所呈現的位置、運動趨勢、可識別條件各不相同。這對人工控制而言就形成了不同的任務難度。根據工效學要求實驗研究的結果,結合工程設計實際,摸索、篩選、確定了3類任務難度、10種測試用例。這些測試用例綜合考慮了上述影響因素,基本覆蓋了在軌飛行可能出現的各種工況,且保證自控轉人控交會對接的初始條件在人的控制能力范圍之內。
由于測試的樣本量與測試的時間成正比,放大測試次數量固然可以取得更理想、更穩定的結果,但是帶來的時間和費用都會大幅提高,需要在參試人數和操作次數之間找到一個平衡點。從小子樣數據分析理論入手[26-27],基于成功率不低于95%的標準,采用試差法,在95%的置信區間內確定了測試人數不小于6人即可滿足測試樣本量檢驗抽樣的相對誤差不大于5%的要求,即完成上述95%任務成功率基線的實驗召集6位受試者即可保證分析結果有效性,如表1所示。在確定了測試所需最少人數之后,另外一個重點就是選擇合適的試驗次數。研究者借鑒了GB5080.5中的“截尾序貫試驗法”[28],來驗證人在復雜系統中完成任務成功率是否達到預先設定的成功率水平,提出了在約定的95%成功率下,不同任務難度、不同失敗數的最小測試樣本量方案,如表2。
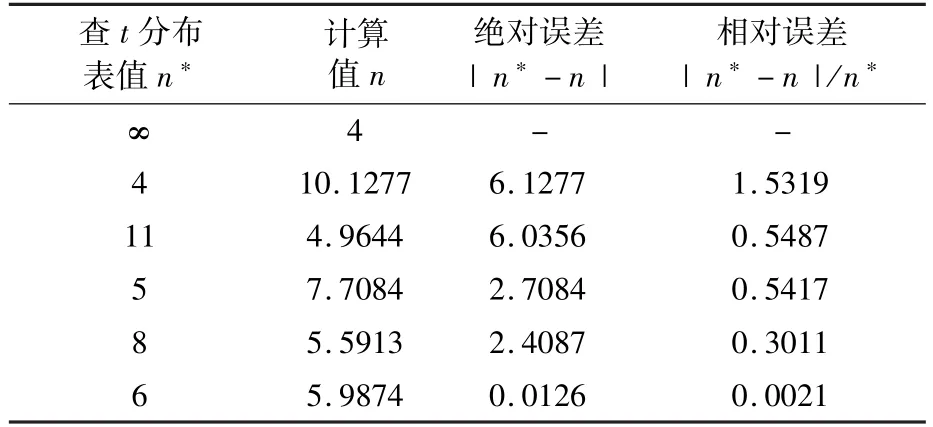
表1 “試差法”求解最小受試者人數結果Table 1 The result of minimum number of subjects calculated by trial and error method

表2 180次操作截尾序貫試驗失誤數推算結果Table 2 The calculating result of operating errors with urine sediment test in 180 trials
3)受試者選拔培訓
確定了測試用例難度和測試樣本數量,最后一個關鍵環節就是要選拔培訓合格的受試者群體。預選受試者經過交會對接理論培訓、控制能力初選、強化訓練后,根據之前建立的綜合績效評價模型篩選出部分預選受試者進行最后的考核測試,測試中要求任何考核用例下均能夠在限定的對接時間、燃料消耗下1次對接成功,同時對接過程追蹤航天器各自由度控制穩定,控制策略運用合理。如此,經過近百次培訓練習和幾輪篩選,選拔出的受試者技能水平接近于航天員,且彼此之間個體差異小。
4 評價實踐
人控交會對接系統工效學評價結論是首次交會對接任務載人航天器出廠放行的條件之一。在工程研制的方案階段,根據工效學要求研究的實驗結果,航天員中心對工程方案的設計指標進行分析,提出工效學改進建議;初樣階段,依據工效學要求,航天員中心對人控交會對接工程設計的單機級產品進行工效學評價,對存在問題的項目提出具體的改進措施;在部件級產品評價合格的基礎上,正樣階段,航天員中心對人控交會對接人控回路開展系統級工效學評價。從工程方案設計開始,借助不同的試驗平臺[29-31](如圖8),緊貼工程迭代開展5大類86項工效學評價,發現并改進工程設計中的工效學問題。考慮到地面評價平臺不能完全模擬在軌飛行的光環境,在地面評價結果的基礎上,利用無人飛行試驗迭代驗證地面評價的結果。如此,各階段、各試驗現場實施的評價,從系統層面解決了工程設計中的工效學問題,確保航天員-航天器-航天環境三者構成的人控回路安全、協同、高效。
4.1 “人控回路”地面狀態的工效學評價結果
2011年7月利用載人航天器人控系統地面驗證平臺,開展了人控交會對接系統人控回路的工效學評價試驗。利用建立的復雜人控回路工效學評價方法,從航天員中心選拔了6名合格的受試者,確定了3種任務難度、10個覆蓋自控轉手控的典型初始狀態測試用例、180人次評價試驗次數的試驗方案,固化了評價對象的技術狀態。
1)對接操作客觀指標結果
受試者實施的180人次評價試驗均1次對接成功,受試者在各個難度水平上的對接時間和燃料消耗滿足單次對接成功的標準。基于評價對象技術狀態和任務難度,航天員中心給出了3種任務模式下完成人控交會對接的成功率均不低于95%的結論,滿足“任務成功率≥95%”的“合格”判據。這表明自控轉手控任務難度水平,追蹤航天器控制系統與人的操作能力匹配,人控交會對接顯示系統人機界面綜合性能滿足工效學要求。
2)受試者主觀問卷結果
受試者操作體驗問卷調查的結果表明:地面視景仿真條件下,陽照區和陰影區均可以完成人控交會對接操作。陰影區對接對遠距離下辨識目標航天器和識別靶標稍有影響,增加了人控對接操作的難度。此外6名受試者的工作負荷量表數據也表明人控交會對接任務的工作負荷水平適宜。
4.2 自控交會對接下傳電視圖像分析驗證
在人控交會對接過程中,航天員對目標航天器的觀測將直接受太陽光照反射強度的影響。空間交會對接必須在滿足太陽光照條件的前提下進行[32]。為了復核地面模型和視景仿真狀態下的工效學評價結果,利用神舟八號與天宮一號自控交會對接試驗,驗證了空間光環境對不同距離點目標航天器及靶標可辨識性的評價結果。2011 年11月通過對兩次自控對接過程下傳電視圖像的工效學分析(如圖9),航天員中心得出如下復核結論:在軌飛行時陽照區、陰影區內執行人控交會對接的電視圖像均能滿足航天員監視、判讀的工效學要求;由于陽照區和陰影區過渡期間光影變化強烈,兩航天器的位姿偏差難以辨別,此階段不利于航天員執行人控對接任務。
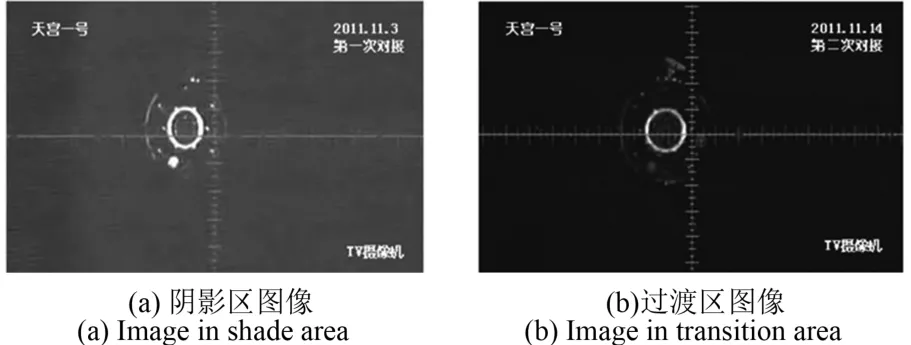
圖9 自控交會對接過程中目標航天器的圖像Fig.9 Image of target spacecraft from TV cameraduring automatic RVD
4.3 人控交會對接在軌試驗任務驗證
2012年6月和2013年6月的兩次載人航天飛行任務中,陽照區內航天員手動控制追蹤航天器與天宮一號實施兩次交會對接試驗,自120 m保持開始至對接完成,航天員執行人控交會對接的操作過程穩定、對接精準、操作時間和燃料消耗在正常范圍,全面驗證人控交會對接技術。航天員返回地面后反饋,對人控交會對接系統人機界面工效學設計非常滿意,進一步驗證了工效學要求的合理性和工效學評價結果的正確性。
5 結束語
通過試驗研究,建立了復雜人控回路中人的操控績效綜合評價模型和基于小子樣數據分析理論的人在回路工效學評價方法,保障了人控交會對接系統的設計水平,為人控交會對接試驗任務的圓滿成功提供了保障,為空間站工程交會對接系統工程設計的工效學評價奠定了堅實的基礎。目前我國載人空間站工程已經啟動,空間站工程面臨新的交會對接工況[33-34],如:追蹤航天器可能采取繞飛、R向對接、遙操作控制等,這將帶來新的工效學問題。因此應從人-系統整合的角度,重點圍繞工程新特點進一步開展深入研究,有針對性地提出新的要求和評價方法,確保工程研制任務平穩推進。
(
)
[1] 周建平.載人航天交會對接技術[J].載人航天,2011,17 (2):1-7. Zhou Jianping.Rendezvous and docking technology of manned space flight[J].Manned Spaceflight,2011,17(2):1-7.(in Chinese)
[2] 朱仁璋.航天器交會對接技術[M].北京:國防工業出版社,2007:205-220. Zhu Renzhang.Rendezvous and Docking Technology of Spacecraft[M].Beijing:National Defend Industry Press,2007:205-220.(in Chinese)
[3] 林來興.四十年空間交會對接技術的發展[J].航天器工程,2007,16(4):70-77. Lin Laixing.Development of space rendezvous and docking technology in past 40 years[J].Spacecraft Engineering,2007,16(4):70-77.(in Chinese)
[4] 馬婷婷,魏晨曦.空間交會對接概述[J].中國航天,2004(7):33-34. Ma Tingting,Wei Chenxi.A brief introduction to space rendezvous&docking[J].Aerospace China,2004(7):33-34. (in Chinese)
[5] Goodman J L.History of space shuttle rendezvous and proximity operations[J].Journal of Spacecraft and Rockets,2006,43(5):944-959.
[6] 張蕊.交會對接故障情況與分析[J].國際航天,2011 (5):8-14. Zhang Rui.Rendezvous and docking fault and analysis[J]. Space International,2011(5):8-14.(in Chinese)
[7] 周前祥.載人航天器空間交會對接過程中人的作用[J].中國航天,2001(15):32-36. Zhou Qianxiang.Role of spaceman in rendezvous docking of manned spacecraft[J].Aerospace China,2001(15):32-36. (in Chinese)
[8] 胡海霞,謝永春.人控交會對接控制方法研究[J].中國空間科學技術,2006(5):10-16. Hu Haixia,Xie Yongchun.Control method research of space manual-control rendezvous and docking[J].Chinese Space Science and Techology,2006(5):10-16.(in Chinese)
[9] Wu Bin,Hou Fang,Yao Zhi,Niu Jianwei,et al.Using physiological parameters to evaluate operator's workload in manual controlled rendezvous and docking(RVD)[C]//Digital Human Modeling,HCII 2011,2011LNCS 6777:426-435.
[10] 王萌,張宜靜,杜曉平,等.手控交會對接中操作者的情境意識和腦力負荷研究[J].載人航天,2014,20(4):378-384. Wang Meng,Zhang Yijing,Du Xiaoping,et al.Investigationon operator's situation awareness and mental workload during manually controlled rendezvous and docking[J].Manned Spaceflight,2014,20(4):378-384.(in Chinese)
[11] 李鵬杰,姚志,王萌,等.心率變異性在手控交會對接操作腦力負荷評價中的應用[J].人類工效學,2013,19 (3):1-5.
Li Pengjie,Yao Zhi,Wang Meng,et al.The application of heart rate variability in the evaluation of mental workload during manual controlled rendezvous and docking[J].Chinese Journal of Ergonomics,2013,19(3):1-5.(in Chinese)
[12] Zhang Y J,Xu Y Z,Li J,et al.Experimental studies of spacecraft rendezvous and docking:The effect of monitoring methods and control complexity on operator performance [C]//12th International Conference on Human-Computer Interaction,2007,LNCS 0000:370-374.
[13] Zhang Yijing.Influence of monitoring method and control complexity on operator performance in manually controlled spacecraft rendezvous and docking[J].Tsinghua Science and Technology,2008,13(5):619-624.
[14] Tian Zhiqiang,Jiang Ting,Wang Chunhui,et al.Study on the control rules of X-axis relative speed of chase spacecraft during the manual control rendezvous and docking[C]//4th International Conference on Applied Human Factors and Ergonomics,2012,ID:987.
[15] 王春慧,蔣婷.手控交會對接任務中顯示-控制系統的工效學研究[J].載人航天,2011,17(2):50-53.
Wang Chunhui,Jiang Ting.Study on ergonomic design of display-control system in manual-control rendezvous and docking [J].Manned Spaceflight,2011,17(2):50-53.(in Chinese)
[16] 楊進,姜國華,晁建剛.基于靶標圖像的航天員人控交會對接方法[J].宇航學報,2010,31(5):1398-1404.
Yang Jin,Jiang Guohua,Chao Jiangang.A cross drone image-based manual control rendezvous and docking method [J].Journal of Astronautics,2010,31(5):1398-1404.(in Chinese)
[17] 李潔,劉皓挺,黃偉芬,等.手控交會對接操作圖形頁面工效學研究[J].載人航天,2011,17(1):27-31.
Li Jie,Liu Haoting,Huang Weifen,et al.Ergonomics research of graphic page in manned control rendezvous&docking[J].Manned Spaceflight,2011,17(1):27-31.(in Chinese)
[18] 田雨,陳善廣,王春慧,等.心理旋轉能力與人控交會對接任務績效的關聯[J].航天醫學與醫學工程,2012,25 (6):397-402.
Tian Yu,Chen Shanguang,Wang Chunhui,et al.Correlation of mental rotation ability with the performance of manually controlled rendezvous and docking[J].Space Medicine& Medical Engineering,2012,25(6):397-402.(in Chinese)
[19] 李銀霞,袁修干.飛機駕駛艙顯控系統工效學評價技術研究綜述[J].人類工效學,2007,13(2):63-65.
Li Yinxia,Yuan Xiugan.Review of researches on ergonomics evaluation techniques of aircraft cockpit's display and control system[J].Chinese Journal of Ergonomics,2007,13(2):63-65.(in Chinese)
[20] 姜紅英.飛機座艙顯控系統工效學評價技術與方法[J].飛機設計,2009,29(5):69-72.
Jiang Hongying.Evaluation technique&method of aircraft cockpit display and control system[J].Aircraft Desing,2009,29(5):69-72.(in Chinese)
[21] 祁洪全.綜合評價的多元統計分析方法[D].長沙:湖南大學,2001. Qi Hongquan.Multivariate Statistics analysis skills to Synthetical Evaluation[D].Changsha:Hunan University,2001.(in Chinese)
[22] 田兵.因子分析模型及其應用[J].陰山學刊,2012,26 (3):8-10.
Tian Bing.The model of factor analysis and application[J]. Yinshan Academic Journal,2012,26(3):8-10.(in Chinese)
[23] 李銀霞,袁修干.改進德爾菲法在駕駛艙顯示系統工效學評價指標篩選中的應用研究[J].航天醫學與醫學工程,2006,19(5):368-372.
Li Yinxia,Yuan Xiugan.Study on modified delphi method as used for index filtration in ergonomic evaluation of cockpit display[J].Space Medicine&Medical Engineering,2006,19 (5):368-372.(in Chinese)
[24] 李銀霞,袁修干,楊春信,等.殲擊機座艙工效學評價指標權重系數的確定[J].航空學報,2006,27(3):370-
373.Li Yinxia,Yuan Xiugan,Yang Chunxin,et al.Weight factors determination of the evaluation indexes of cockpit ergonomics[J].Journal of Astronautics,2006,27(3):370-373.(in Chinese)
[25] Jiang T,Wang C,Tian Z,et al.Study on synthetic evaluation of human performance in manually controlled spacecraft rendezvous and docking tasks[C]//14th International Conference on Human-Computer Ineraction,2011,LNCS 6777:387-393.
[26] 鄧勃.分析測試數據的統計處理方法[M].北京:清華大學出版社,1995.
Deng Bo.Statistic Treatment Skills on Analyzing and Testing Data[M].Beijing:Tsinghua University Press,1995.(in Chinese)
[27] Bolboacǎ S,Achima? Cadariu A.Binomial distribution sample confidence intervals estimation 2.Proportion-like medical key parameters[J].Leonardo Electronic Journal of Practices and Technologies,2003,2(3):75-110.
[28] GB/T 5080.5-85設備可靠性試驗第5部分:可靠性試驗成功率的驗證試驗方案[S].北京:國家標準局,1985.
GB/T 5080.5 Equipment reliability testing Part 5:Compliance test plans for success ratio[S].Beijing:CN-GB,1985. (in Chinese)
[29] 王寶智,姜國華,晁建剛,等.交會對接手控工效實驗系統設計與實現[J].航天醫學與醫學工程,2011,24(1):30-35.
Wang Baozhi,Jiang Guohua,Chao Jiangang,et al.Design and implement of manned rendezvous and docking ergonomics experimental system[J].Space Medicine&Medical Engineering,2011,24(1):30-35.(in Chinese)
[30] 任焜,李彬,李志宇.“人在回路”的載人航天器控制系統地面驗證平臺設計[J].空間控制技術與應用,2010,36 (4):50-53.
Ren Kun,Li Bin,Li Zhibin."Man-in-the-Loop"design of verification platform for the manned spacecraft control system [J].Aerospace Control and Application,2010,36(4):50-53.(in Chinese)
[31] 石磊,張新邦,萬磊,等.人控交會對接九自由度半物理仿真試驗系統設計及驗證[J].空間控制技術與應用,2013,39(4):38-43.
Shi Lei,Zhang Xinbang,Wan Lei,et al.Design and validation of the experimental system for 9-degree freedom hardwarein-loop simulation of manual rendezvous and docking[J]. Aerospace Control and Application,2013,39(4):38-43. (in Chinese)
[32] 潘剛,任萱.空間交會對接中太陽光照窗口的研究[J].飛行力學,2002,20(2):62-66.
Pan Gang,Ren Xuan.Study on sun illumination window during a space interconnection[J].Flight Dynamics,2002,20 (2):62-66.(in Chinese)
[33] 唐國金,周劍勇,張波,等.遙操作交會對接技術綜述[J].載人航天,2011,17(2):38-43.
Tang Guojin,Zhou Jianyong,Zhang Bo,et al.A survey of
Research and Practice of Ergonomic Requirements and Evaluation Technology in Manually Controlled Rendezvous and Docking of Spacecrafts
HUANG Weifen,TIAN Zhiqiang,WANG Chunhui
(China Astronaut Research and Training Center,National Key laboratory of Human Factors Engineering,Beijing 100094,China)
This paper analyzed the ergonomic requirements on the engineering design of Manually Controlled Rendezvous and Docking(MCRVD)system in spacecrafts from the human-system integration perspective.Based on small sample theory and reliability testing method,a scientific and effective evaluation method for complex human controlled loops was established.System-level evaluation experiment of the engineering design in MCRVD system was carried out to study the compatibility of human capability with the spacecraft display-control system.Proper illumination environment for MCRVD was determined by analyzing the video images of Shenzhou 8 and Tiangong 1 automatic RVD and the effectiveness of ergonomics requirements and evaluation results were confirmed by two MCRVD testing during Shenzhou 9 and Shenzhou 10 manned space missions.Finally,according to the structure characteristics of the Chinese space station,the research focus of the ergonomics in MCRVD technology during space station phase was proposed.
spacecraft;RVD;manual-control;ergonomics;evaluation technology
V423.4+1
A
1674-5825(2015)06-0535-09
2015-06-24;
2015-11-10
中國載人航天工程資助項目(HY100927);中國航天醫學工程預先研究項目(2012SY54A1705,2014SY54A001)
黃偉芬(1964-),女,碩士,研究員,中國載人航天工程航天員系統副總設計師,研究方向為航天人因工程。E-mail:hwf_2006 @sina.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
石油瀝青(2021年4期)2021-10-14 08:50:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
