基于快速交會特殊點變軌策略的航天器發射窗口分析
2015-10-24 05:39:28王雪瑤龔勝平李俊峰馬曉兵
載人航天 2015年6期
王雪瑤,龔勝平,李俊峰,彭 坤,馬曉兵
(1.清華大學航天航空學院,北京100084;2.北京空間科技信息研究所,北京 100086;3.中國空間技術研究院載人航天總體部,北京 100094)
基于快速交會特殊點變軌策略的航天器發射窗口分析
王雪瑤1,2,龔勝平1,李俊峰1,彭 坤3,馬曉兵3
(1.清華大學航天航空學院,北京100084;2.北京空間科技信息研究所,北京 100086;3.中國空間技術研究院載人航天總體部,北京 100094)
快速交會任務將會隨著未來航天任務的增加而成為主流形式,發射窗口的選擇是快速交會任務完成的關鍵因素。當交會任務特殊點變軌策略確定后,若使整個變軌過程中追蹤器達到最少燃料消耗,則需要目標器與追蹤器初始時刻的相位差在一定范圍內。利用交會任務的線性化方程組可以估算該相位差,經過遍歷計算可以確定追蹤器的相位窗口。另一方面,根據追蹤器的異面變軌能力以及不同的發射策略可以確定周期性的平面窗口。本文綜合相位窗口和平面窗口的選擇方法,在測控等其他條件理想的情況下,得出追蹤器最終發射窗口,是快速交會任務完成的必要條件。
快速交會;變軌策略;相位差;相位窗口;平面窗口;發射窗口
1 引言
交會對接技術是發展航天技術、增強人類探索和開發太空資源能力的一項重大關鍵技術[1]。它與載人天地往返、出艙活動并稱為載人航天的三大基本技術,是中國載人航天工程重要技術支持,也為中國未來載人登月、載人登火星等任務奠定了堅實基礎。從1965年12月15日美國雙子星飛船在航天員的參與下實現第一次載人空間交會對接開始,到2014年中期為止,美國、蘇聯/俄羅斯、日本、歐洲航天局和中國已經實現了350次交會對接,其中307次與空間站對接,一天左右實現的快速交會有33次[2]。唐國金、羅亞中等[3]將航天器空間交會對接的飛行過程劃分為四個階段:地面導引段、自動尋的段、最終逼近段、對接段[3]。目前空間飛行器交會對接技術遠程導引段可以按照變軌點的不同分為特殊點變軌交會模式和一般變軌交會模式;按交會時間不同可以分為俄羅斯最近所使用的4~6圈快速交會模式[4]以及目前中國所使用的兩天交會模式。科學技術的發展,尤其是中繼衛星與導航衛星引領的天基測控與通信技術的發展,打破了原來地面站數量和測控范圍有限的束縛。與此同時,精確的測軌與入軌技術的發展,使飛船發射的入軌相位更加精確,使4~6圈的快速交會模式具有更多必要條件。對于交會對接發射窗口的選擇,一些學者已經做了一定的研究,在滿足軌道陽光角、共面和相位角等約束后可以確定初步發射窗口[5]。其中,文獻[6]在未考慮交會對接任務其他約束條件下,對太陽光照窗口做了詳細研究。文獻[7]則是在不考慮光照等其他約束條件下分析了交會對接任務中初始軌道對發射窗口的影響。與一般交會模式相比,快速交會模式的交會圈次減少,對應的相位窗口被限制,而任務的發射窗口選擇就更具有制約性。追蹤器必須在合適的時間被運載火箭發射到合適的相位范圍內,才有可能實現整個快速交會任務。本文在實現特殊點變軌的快速交會遠程導引策略設計基礎上,計算出目標器與追蹤器的初始相位差范圍。通過計算所得的初始調相范圍,在不考慮光照條件下,結合追蹤器的平面窗口與相位窗口進行理論分析,設計出快速交會任務的實際發射窗口。
本文首先在理論層面對快速交會任務的發射窗口進行分析,分別在初始時刻調相范圍、相位窗口以及平面窗口三個方面進行理論分析,在目標器軌道要素已知的情況下實現快速交會的窗口設計。最后對快速交會任務窗口方案設計進行了總結。
2 快速交會發射窗口理論分析
快速交會窗口寬度主要由相位窗口和平面窗口決定[8]。快速交會任務的特殊性對目標器與追蹤器的初始相位差有很高的要求。初始時刻,追蹤器需要被發射到距離目標飛行器一定相位范圍內才可能在短時間內完成交會對接任務,否則追蹤器會在交會過程出現反噴情況浪費大量燃料,很難實現最后的交會任務。該窗口被稱為相位窗口,分析快速交會任務的相位窗口對快速交會任務的實現非常必要。
其次,發射窗口寬度與運載火箭和追蹤器的異面變軌能力有關。追蹤器若在某個時間段內發射,通過運載火箭和追蹤器的機動控制,最終能夠實現追蹤器與目標器的軌道面重合[8]。一般工程計劃會根據追蹤器的機動能力確定允許軌道面偏差范圍,根據偏差計算追蹤器平面窗口[8]。平面發射窗口一般每天出現兩次,分別為一次升軌發射窗口和一次降軌發射窗口。發射示意圖如圖1所示,A為升軌發射方位角,A′為降軌發射方位角。
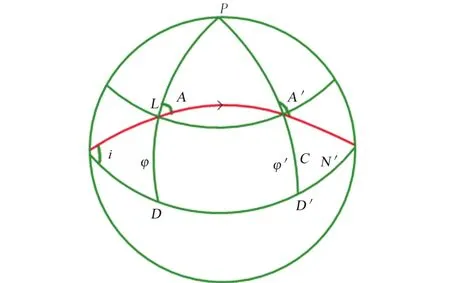
圖1 追蹤器發射示意圖Fig.1 Schematic diagram of tracer launch
在不考慮太陽光照角的理想情況下,整個發射窗口的寬度設計是同時考慮相位窗口與平面窗口的交集,最終實現快速交會任務[8]。
2.1 快速交會任務初始調相分析
將目標飛行器作為被動對接對象,載人飛船作為追蹤飛行器,二者進行交會對接。考慮特殊點變軌策略下交會對接過程的遠程導引段,假設追蹤器在指定時間內進行四次軌道機動完成交會要求[10]。遠程導引段從飛船入軌進入初始軌道導引開始,到自主控制段起點結束,一方面需要提高飛船軌道高度,調整兩飛行器的相位差縮短相對距離;另一方面需要消除兩飛行器軌道面偏差[10]。
衛星在地球引力作用下運動,動力學方程可以表示為式(1)[9]:
其中:r為衛星對地球的矢徑,μ為地球引力常數。
在旋轉坐標系下,衛星的動力學方程[9]可以表示為式(2):

考慮追蹤器在四次脈沖作用下實現與目標器交會,其中三次面內變軌,一次面外變軌,利用線性方程可以表示為式(3):

ΦFi為從第i次變軌時刻到F時刻的CW狀態轉移矩陣[6],其中F時刻為遠程導引段結束時刻。
平面內三次變軌方程組相互耦合,必須聯立求解[10]。因為面內徑向脈沖對軌道要素改變的影響較小,假設面內變軌脈沖只有橫向分量無徑向分量,將式(3)重新整理并歸一化得到式(4)~ (7)所示方程組:
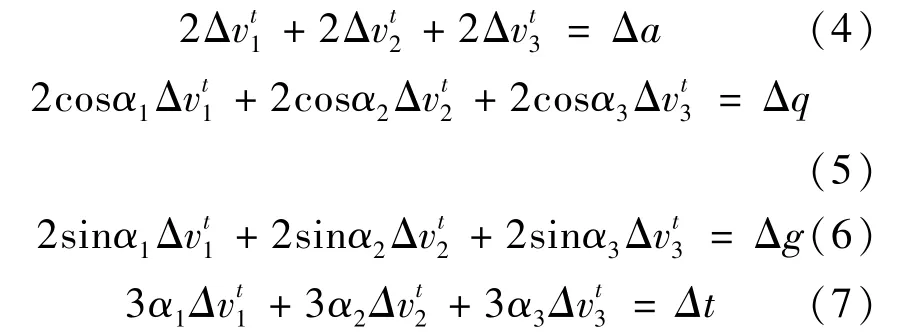
其中,αi為從第i次變軌時刻到交會時刻參考軌道上參考位置所轉過的相角,Δa、Δq、Δg、Δt為初始軌道、目標軌道與參考軌道歸一化之后的關系[10]。若采用特殊點變軌的快速交會策略,確定第一次與第二次變軌位置在某圈次近地點或遠地點,則上述方程組中未知數與方程數相同,可通過迭代得到線性化方程的解,以該解作初值,通過打靶法迭代得到快速交會二體模型下的解[11]。
在測控條件有限的情況下,飛船與空間站進行交會,因為空間站位置不確定,難以提供在追蹤器發射時刻精確的目標器相位角,這就導致追蹤器入軌后和目標器的相位誤差較大,而追蹤器一圈可實現的相角調整有限,所以一般選取多圈交會對接模式。對于現在先進的測軌及入軌技術,可以較準確地選取并調節目標器與追蹤器的初始時刻相位差,達到快速交會模式的必要條件。對于給定交會圈次與交會時間,目標器初始位置已知,追蹤器初始位置可調的工況,可以通過在初始時刻選取合適的目標器與追蹤器相位差,使整個特殊點變軌過程的燃料最優[4]。
由式(4)可知,在歸一化的條件下,三次面內脈沖矢量和的兩倍為初始軌道與目標軌道半長軸之差。若使三次面內脈沖量大小盡可能小,則需要使三次脈沖均同向,即整個多次脈沖變軌過程不出現反噴現象。若要使得三次脈沖均為同向,可以根據式(4)、(7)估算出目標器交會位置與追蹤器初始位置的相位差Δα的范圍。
式(7)中,因為變軌位置α1最大,α3最小,所以有關系α1>α2>α3。若要使面內三次變軌脈沖盡可能同向達到燃料最優,可分別令以及,估算出交會相位差Δα的下極限與上極限。因交會時間確定,可推導出初始時刻兩飛行器相位差范圍,即初始調相范圍。由式(8)與式(9)得出理論估算交會時刻目標器與初始時刻追蹤器可調相位差的下界Δαlo與上界Δαup。通過確定的交會時間,可推導出目標器和追蹤器初始時刻允許的相位差范圍。
其中,a0為初始軌道半長軸,af為目標軌道半長軸,μ為常數,tf為交會時間,α1是第一次變軌位置,α3是第三次變軌位置。
根據目標器的初始相位角和初始時刻目標器與追蹤器允許的相位差范圍,得到初始時刻追蹤器實際可調相位的上下界,為進一步設計窗口做鋪墊。
2.2 相位窗口分析
若在某個時間段內,入軌的追蹤器與目標器的相位差在交會策略能夠調節范圍內,能夠實現與目標器的交會,則稱該時間段為相位窗口[8]。對于快速交會任務來說,兩航天器的初始相位差有更為嚴格的要求[4]。因此雖然追蹤器每天有兩次的平面窗口機會,但不是每個平面窗口都滿足相位窗口要求。一般來說,追蹤器的相位窗口可以通過在等待合適圈次后,出現平面窗口時,追蹤器在發射位置的相位角位于允許的初始相位范圍時,才適合選擇發射。
建立降軌發射模型如圖2。設地心指向春分點為x軸,其與赤道交點M的赤經為0。格林尼治0時刻經線與赤道的交點為L,則格林尼治0時刻赤經為∠MOL=α。N為入軌點,NP(為入軌點經度弧,與赤道交于P點,則入軌點經度為∠LOP=β。D為降軌發射線與赤道的交點,則降交點經度與入軌點經度差為∠POD=γ。計算某時刻發射入軌線的升交點赤經,選取基準時間(例如2014年10月1日0時0分0秒),若并選取降軌發射策略,則追蹤器入軌線降交點赤經為:α+β+γ;升交點赤經為α+β+γ+π。同理,若發射策略為升軌發射,如圖3所示,G為升交點,則入軌點經度與升交點經度差為∠POG=-γ。入軌點經度為∠LOP=β,則追蹤器準確入軌時軌道升交點赤經為α+β-γ。當追蹤器準確入軌赤經與設計入軌赤經重合,即平面窗口出現時即可選擇發射。此時入軌點的相位角為從發射軌線上升交點到入軌點的圓弧角。因為交會任務對追蹤器的初始相位有要求,每次平面窗口出現時,目標器的相位角確定,根據變軌策略可以計算出初始時刻目標器與追蹤器允許的相位差。追蹤器在入軌點的相角需要在初始相位允許范圍之內時才能擇機發射。因此,不是每次平面窗口出現追蹤器就能發射,需要等待合適圈次之后,當追蹤器在入軌點同時滿足相位窗口與平面窗口要求時才可以選擇發射。
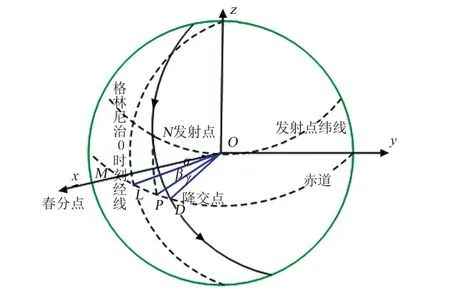
圖2 降軌發射升交點赤經計算示意圖Fig.2 RAAN calculation of drop rail launch
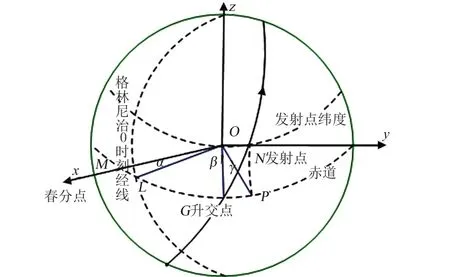
圖3 升軌發射升交點赤經計算示意圖Fig.3 RAAN calculation of rail launch
計算入軌點相位角,以降軌發射為例,如圖4,L為入軌點,N點為軌線的降交點,O點為地球球心,D點為過L點子午線與赤道的交點。則L點的相角為軌線升交點到L點的夾角,在圖中可以表示為π-∠LON。而β=∠LOD為L點的緯度,,且∠LON與α、β有三角關系cos∠LON= cosαcosβ,根據此關系可以得出入軌點的相位角。因為快速交會任務對發射位置的初始相位范圍有要求,等待圈次改變時,要求的初始相位范圍區間大小不變。但每圈平面窗口出現時,入軌點對應的目標器初始相位不同,即追蹤器發射的初始相位邊界值在變化。每次平面軌道窗口出現時,L點相角位于要求的初始相位差范圍內時,才可以選擇發射。升軌發射原理相同,此處不做贅述。
2.3 平面窗口分析
一般工程設計會根據運載火箭和追蹤器的機動能力確定允許軌道面偏差范圍,根據偏差計算追蹤器平面窗口[8]。以升軌發射為例,如圖4所示,在共面發射時刻標稱目標軌道面通過發射場,在球面上位于L點,標稱共面發射方位角A,由于發射延遲,實際發射時發射場位于L′點,發射角為A′。假設發射方位角按共面發射的要求設定,不可改變,即A′=A,則有i′=i,Ω′≠Ω。為滿足非共面的限制范圍(按軌道夾角Δi的最大值限制),由式(10)所示球面三角形公式可得平面窗口的寬度[8]:
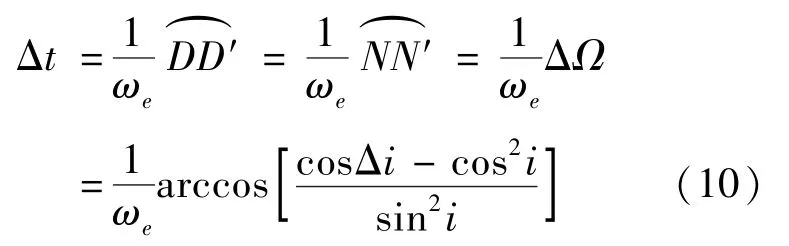
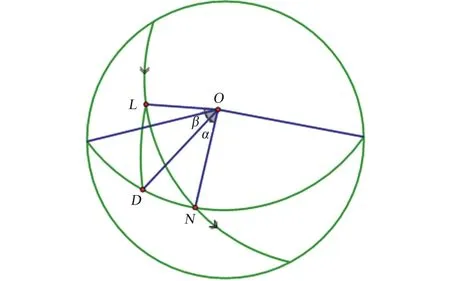
圖4 降軌發射點相角示意圖Fig.4 Phase diagram of drop rail launch point
如果發射方位角可調,如圖5所示,即A′≠A,兩軌道面交線的節點為Q,則理論發射軌跡與實際發射軌跡的夾角Δi符合式(11)所示球面三角形NN′Q的角余弦公式[8]:

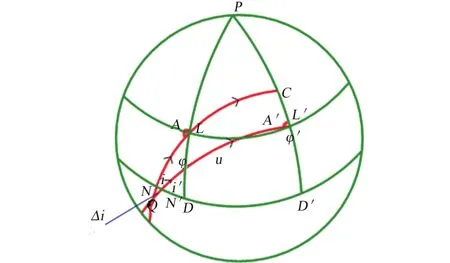
圖5 發射方位角可調的發射示意圖Fig.5 Diagram of optional launch azimuth
延長理論發射軌跡與發射時刻發射場的經度圈的交點為C,其緯度為φ′,由于理論發射軌道已知,其與發射經線的交點與實際發射時刻是對應的;令兩軌道面交線的節點Q與入軌點的角距為u,由球面三角形L′CQ,有關系式(12):

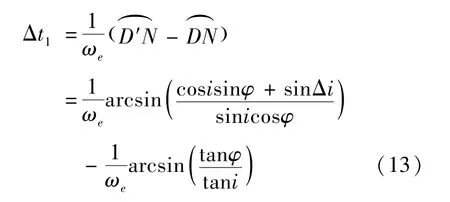
調節發射方位角A′,根據偏離共面發射的時
差選擇最優發射方位角,使入軌點至兩軌道交線節點的角距u=90°,進而使夾角Δi最小。對于給定的非共面夾角Δi的允許范圍,平面右窗口寬度表示為式(13):
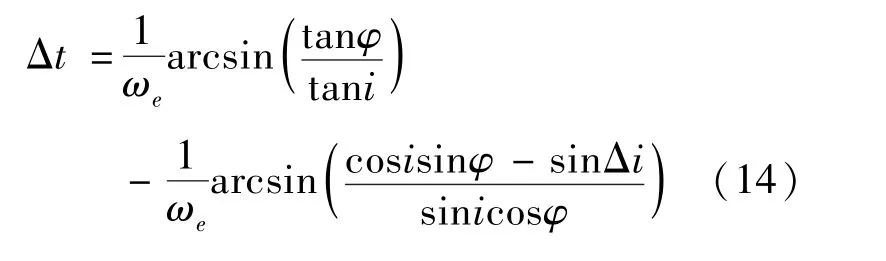
降軌發射的左窗口寬度與升軌發射右窗口寬度相同。且升軌發射的左平面左窗口寬度與降軌發射右窗口寬度相同[8],如式(14):
3 快速交會窗口算例實現
給定初始時刻追蹤器與目標器的軌道要素如表1所示,其中初始時刻追蹤器的真近點角待定,為X。允許的軌道面偏差Δi=1°,計算6圈交會的快速變軌策略:其中面內三次變軌分別位于第1圈遠地點、第3近地點和第5圈,面外變軌位于第2圈。交會時間為tf=28 850 s,選取發射地點(110.75°E,19.62°N)和基準時刻(2014年10 月1日0時0分0秒)。根據計算的目標器與追蹤器初始相位差范圍,選擇相位窗口,再結合平面窗口來選擇距離基準時刻最近的升軌發射窗口。
由于交會時間tf=28 850 s以及交會圈次N =6確定,可以理論估算初始時刻追蹤器和目標器相位差的下限與上限。在目標器初始相角確定的情況下,通過對理論范圍追蹤器初始相角的遍歷計算,可以得到實際脈沖最優情況下,追蹤器允許的初始相角范圍。該初始相位范圍即為追蹤器的相位窗口。對于每次出現的平面窗口,目標器的相位都是變化的,但是變軌策略允許的初始時刻目標器與追蹤器相位差ωf+ff-ω0-f0不變。隨著等待不同圈次平面窗口出現,追蹤器的初始相位隨之改變,根據允許目標器與追蹤器相位差范圍,得出追蹤器初始時刻相位角的范圍。

表1 快速交會任務軌道要素Table 1 Orbital elements of short rendezvous
已知特殊點變軌策略,對于追蹤器不同的初始時刻相位角,可以根據文獻[10]和文獻[11]提供的算法計算整個面內變軌總脈沖大小。將近圓交會方程線性化,并以線性化的解作為初值,通過打靶法得出二體模型下的交會脈沖解。對于表1中軌道參數,圖6為初始時刻目標器與追蹤器相位差與面內總脈沖大小關系。圖中藍線所示橫坐標為理論估算平面內三次脈沖為正的初始時刻目標器與追蹤器相位差,為[2.3778°,26.4535°],紅色*之間橫坐標表示二體模型下實際三次脈沖正的初始相位差范圍,為[2.8762°,22.4690°]。1.1節理論估算初始相位差范圍時,是利用脈沖交會燃料最優的必要條件而不是充分條件,所以理論估算范圍要比實際范圍大。目標器與追蹤器在發射時刻的初始相位差必須位于兩紅色*橫坐標之間,以此結論選擇相位窗口。地球每轉半圈出現一次的平面窗口,并不是每次平面窗口都會滿足相位窗口要求,需要追蹤器等待合適的半圈次之后才能同時達到相位窗口與平面窗口的要求,此時才能選擇發射。以發射角不變的發射策略為例,選取2014年10月1日0時0分0秒為基準時刻,此時目標器的軌道要素如表格1所示,求得此時格林尼治0時刻赤經,并求得入軌點入軌軌道的升交點赤經。當入軌點入軌軌道的升交點赤經與目標器軌道赤經重合時,即得到一個平面窗口。理想情況下入軌點相位的計算可以表示為:共面時刻入軌點到升交點的圓弧角。入軌點入軌軌道面從基準時刻到第一次與目標軌道面重合為等待0個半圈次,以后地球每轉一個半圈次就出現一個平面窗口。對于每個平面窗口出現時,計算該時刻目標器和追蹤器的初始相位差是否位于變軌策略允許的初始相位差范圍內,即是否位于相位窗口內。同時滿足相位窗口和平面窗口要求時,才是選擇的發射窗口。該算例經過計算,追蹤器在入軌點需要等待4個半圈之后,選擇升軌發射策略,才滿足發射窗口要求。每次平面窗口出現時,目標器的相位不同,但是初始相位差允許范圍不變。根據圖6所示目標器與追蹤器初始相位差關系,可以得到追蹤器發射時相角的上下界。入軌點每次經過平面窗口時的相位與發射邊界情況如表2所示。

圖6 初始時刻相位差與面內總脈沖大小關系Fig.6 Relationship between initial phase difference and total impulse
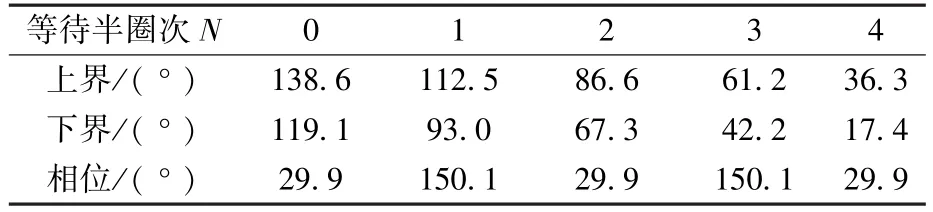
表2 追蹤器等待發射時的相位與發射邊界Table 2 Launch phases and boundaries during waiting time of tracer
以上算例中,變軌能力允許的軌道面偏差Δi =1°,選取相位窗口與平面窗口的交集,才是實際發射窗口的選擇范圍。選取發射角不變的發射策略,選取2014年10月1日0時0分0秒為基準時間,此時目標器的軌道要素如表1所示。J2攝動模型下計算離基準時間最近的升軌發射窗口。根據已知的相位窗口條件約束,可以計算最近的升軌發射窗口為2014年10月3日10時41 分31秒至2014年10月3日10時53分8秒,理論窗口寬度為697 s。若選擇發射角可變的升軌發射策略,則最近的理論發射窗口為2014年10 月3日10時40分40秒至2014年10月3日10 時54分4秒,理論窗口寬度為804 s。從計算結果可知,發射角可變發射策略的發射窗口寬度要比發射角不變策略的發射窗口寬度要寬,這與理論推導結果相同。
若追蹤器在該窗口設計范圍內發射,則可以順利實現快速交會。假設初始時刻追蹤器的真近點角為0,則目標器與追蹤器的初始相位差為0.3 rad,位于允許的初始相位差范圍內。交會任務遠程導引段變軌情況如表3所示,而整個遠程交會示意圖如圖7所示。其中藍色實心·為初始位置,紅色實心·為目標交會位置,Δ為四次變軌位置,*為實際交會位置。
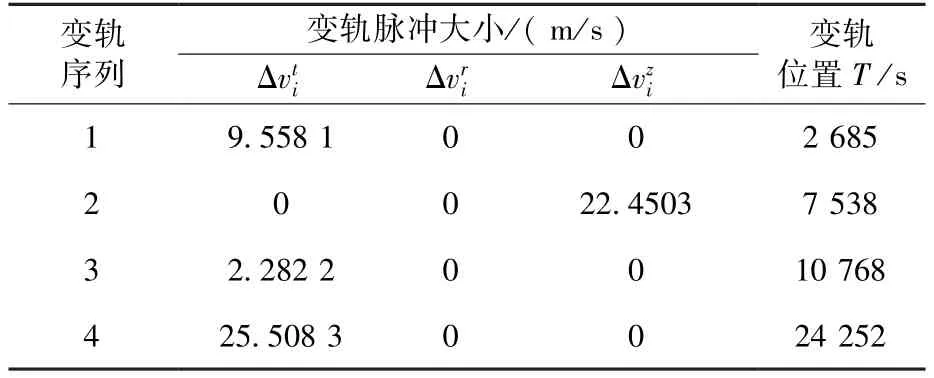
表3 快速交會遠程變軌位置及大小Table 3 Position and amplitude of maneuvers in short rendezvous mission
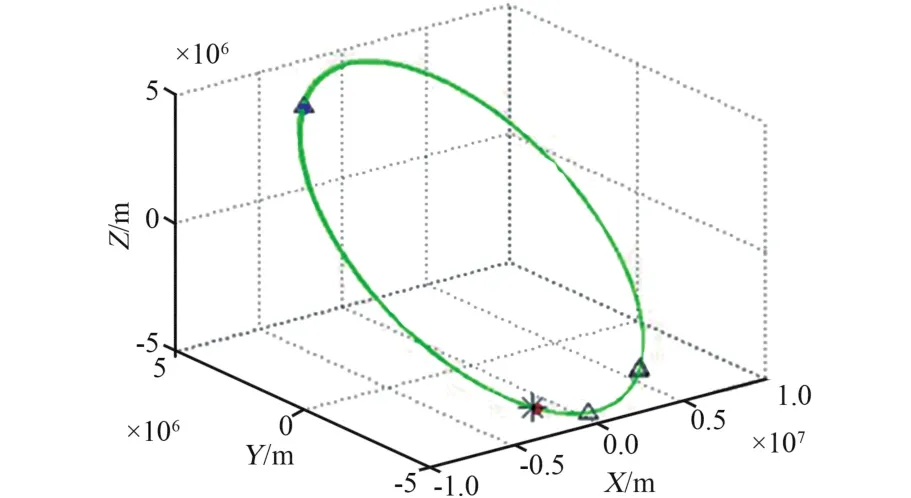
圖7 快速交會遠程變軌示意圖Fig.7 Remote guidance of short rendezvous mission
4 結論
快速交會任務的實現與遠程變軌策略、目標器與追蹤器的初始相位差有很大關系,因此發射窗口的選擇對任務完成有關鍵的影響。快速交會任務需在短時間內完成,所以目標器與追蹤器的初始相位差需在一定范圍之內。在發射窗口選擇時,要充分考慮初始相位差的制約,等待合適的時機,選擇合適的相位窗口,為快速交會任務的成功奠定良好的基礎。
對于不同的發射策略,平面窗口的選擇也是不同的。可以根據發射角不變或者發射角可變,升軌發射或者降軌發射的不同發射策略對平面窗口進行設計,綜合發射窗口確定實際發射窗口。
變軌策略與發射窗口設計都是快速交會任務順利完成的一部分。若要完成整個任務工程,需要各方面的協調配合以及各部分的精確設計與制造。
(
)
[1] 周建平.載人航天交會對接技術[J].載人航天,2011,17(2):1-8.
Zhou Jianping.Manned Space Rendezvous and Docking Technology[J].Manned Spaceflight,2011,17(2):1-8.(in Chinese)
[2] 安德華,王永生.俄羅斯載人飛船“快速對接”飛行模式淺析[J].國際太空,2014(6):38-41.
An Dehua,Wang Yongsheng.Analysis on‘Quick Docking' flight mode of russian human spacecraft[J].Space International,2014(6):38-41.(in Chinese)
[3] 唐國金,羅亞中,張進.空間交會對接任務規劃[M].北京:科學出版社,2008:20.
Tang Guojin,Luo Yazhong,Zhang Jin.Space Rendezvous and Docking Mission Planning[M].Beijing:Science Press,2008:20.(in Chinese)
[4] Murtazin R F,Budylov S G.Short rendezvous missions for advanced russian human spacecraft[J].Acta Astronautica,2010,67(7):900-909.
[5] 李海陽,彭祺擘,周英,等.航天器交會對接發射窗口分析[J].宇航學報,2009,30(5):1861-1864.
Li Haiyang,Peng Qibo,Zhou Ying,et al.Analysis on launch window of rendezvous and docking mission[J].Journal of Astronautics,2009,30(5):1861-1864.(in Chinese)
[6] 潘剛,任萱.空間交會對接中太陽光照窗口的選擇[J].飛行力學,2002,20(2):62-66.
Pan Gang,Ren Xuan.Choice of the light window of rendezvous and docking mission[J].Flight Mechanics,2002,20 (2):62-66.(in Chinese)
[7] 張麗艷,王忠貴.交會對接任務發射窗口相關問題研究[J].載人航天,2005,11(6):13-16.
Zhang Yanli,Wang Zhonggui.Research on issues related to launch window of rendezvous and docking mission[J].Manned Spaceflight,2005,11(6):13-16.(in Chinese)
[8] 章仁為.衛星軌道姿態動力學與控制[M].北京:北京航空航天大學出版社,2006:20-30.
Zhang Renwei.Satellite Attitude and Orbit Dynamics and Control[M].Beijing:Beihang University Press,2006:20-30.(in Chinese)
[9] 柯蒂斯H D.軌道力學[M].周建華,徐波,馮全勝,譯.北京:科學出版社,2009:10-15.
Curtis H D.Orbital Mechanics[M].Zhou Jianhua,Xu Bo,Feng Quansheng,translate.Beijing:Science Press,2009:10-15.(in Chinese)
[10] 龔勝平,李俊峰.多沖量近圓軌道交會的部分變量瞄準法[J].空間控制技術與應用,2009,35(1):13-18.
Gong Shengping,Li Junfeng.Part variable sighting method of multi-impulse rendezvous mission near circular orbits[J]. Space Control Technology and Application,2009,35(1):13-18.(in Chinese)
[11] 王翔,龔勝平,李俊峰.多沖量近圓軌道交會的快速打靶法[J].空間控制技術與應用,2010,36(5):1-6.
Wang Xiang,Gong Shengping,Li Junfeng.Quick shooting method of multi-impulse rendezvous mission near circular orbits[J].Space Control Technology and Application,2010,36(5):1-6.(in Chinese)
Analysis of Launch Window in Short Rendezvous Mission Transferred at Special Points
WANG Xueyao1,3,GONG Shengping1,LI Junfeng1,PENG Kun2,MA Xiaobing2
(1.School of Aerospace Engineering,Tsinghua University,Beijing 100084,China;2.Beijing Institute of Space Science and Technology Information,Beijing 100086,China;3.Institute of Manned Space System Engineering,China Academy of Space Technology,Beijing 100094,China)
With development of space exploration,short rendezvous technique will be widely used in the future.The launch window is very important for the accomplishment of short rendezvous mission. When designing transfer strategy at special points,the phase difference between the target spacecraft and the tracing spacecraft should be within the proper range,so the total fuel consumption will be the least.With the phase difference estimated by linearized equations,the phase launch window of tracing spacecraft can be obtained through traversal calculation,considering the state of target spacecraft.Additionally,the launch strategy and the limit of non-coplanar orbit transferring ability can influence the periodic plane launch window.Supposing the conditions of tracking telemetry and command(TT&C)are ideal,the final launch window will be obtained combining the phase window and the plane window in this issue,which is the essential condition of short rendezvous mission.
short rendezvous;transfer strategy;phase difference;phase launch window;plane launch window;launch window
V412.4+1
A
1674-5825(2015)06-0553-07
2014-12-29;
2015-10-19
載人航天預先研究項目(010103)
王雪瑤(1990-),女,碩士研究生,研究方向為軌道動力學與控制。E-mail:tsingsnow@gmail.com
