用于空間站組建的翻轉式轉位方案設計
2015-10-24 05:39:38沈曉鵬胡雪平耿海峰
載人航天 2015年6期
劉 艷,沈曉鵬,胡雪平,耿海峰,魏 智
(上海宇航系統工程研究所,上海 201109)
用于空間站組建的翻轉式轉位方案設計
劉 艷,沈曉鵬,胡雪平,耿海峰,魏 智
(上海宇航系統工程研究所,上海 201109)
針對我國空間站工程規劃,借鑒和平號空間站的組建經驗,提出了一種適用于我國空間站建造的翻轉式轉位技術方案,即先通過對接機構實現實驗艙與核心艙的軸向對接,然后利用翻轉式轉位機構將實驗艙轉位至側向對接口并支持對接機構完成側向對接。通過任務及功能分析、機構構型分析、機構自由度分析,確定了翻轉式轉位機構工作原理、具體組成及布局、系統工作過程以及工作時序,同時對其優點及局限性進行了分析,可為空間站工程提供參考。
空間站;翻轉式轉位機構;方案設計
1 引言
空間站技術代表著航天技術的綜合水平,建造大型空間站也是我國載人航天工程的目標之一。由于受到運載工具運載能力的限制,大型空間站要在太空對接組裝[1-2]。依據和平號空間站和我國空間站構型,大型空間站組裝方案為:在首先發射的核心艙的節點艙前端集中配置若干對接口,包括一個軸向對接口和若干個側向對接口。其中軸向對接口軸線通過核心艙質心,側向對接口軸線則不通過核心艙質心。依次發射的其他艙體與節點艙對接口一一對應對接組裝。軸向對接口的對接稱為軸向對接,可通過直接軸向對接完成組裝。側向對接口的對接稱為側向對接,但由于在軌道控制、姿態控制等方面都存在困難,因此直接側向對接目前還未能在空間實現[3]。
為了實現側向對接,一種解決方法是先將航天器對接到軸向,然后利用翻轉式轉位機構將航天器轉移到側向對接口,實現側向對接。和平號空間站即采用此種方案。和平號空間站核心艙1986年2月發射升空,直到1996年4月核心艙與最后一個自然號實驗艙對接轉位組裝成功。在整個構建過程中,翻轉式轉位機構成功實現了各個艙體從軸向到側向的轉位[4]。
另一種側向對接口對接技術是利用機械臂直接捕獲、抓取航天器到側向對接口,然后進行對接。進行對接的航天器需要在空間站附近預定地點停泊,而且停泊時需要高精度保持相對位置和姿態穩定,這是一個困難的控制問題。現國際空間站采用了這一對接方式[5]。
在翻轉式轉位機構捕獲過程中,由軸向對接機構的對接建立捕獲初始條件,而在機械臂的捕獲過程中,由兩航天器之間的懸停飛行建立捕獲初始條件,兩者相比,前者技術難度小,可靠性高。我國未來的大型空間站方案與和平號空間站和國際空間站類似,是由多個艙段和模塊組合而成的軌道復合體。在我國空間站項目建設計劃初期建造軌道復合體處于探索階段,應用翻轉式轉位機構實現側向對接比較經濟、穩妥、可靠。本文基于我國空間站系統規劃,借鑒和平號空間站的組建經驗,進行空間站翻轉式轉位方案設計。
2 實驗艙翻轉式轉位方案論證
2.1 任務分析
在空間實驗室任務成功的基礎上,我國將研制并發射空間站。空間站由核心艙、實驗艙Ⅰ和實驗艙Ⅱ三個模塊組成,同時配套載人飛船和貨運飛船作為乘員和物品運輸的支持系統[6-7],圖1是空間站構型示意圖。
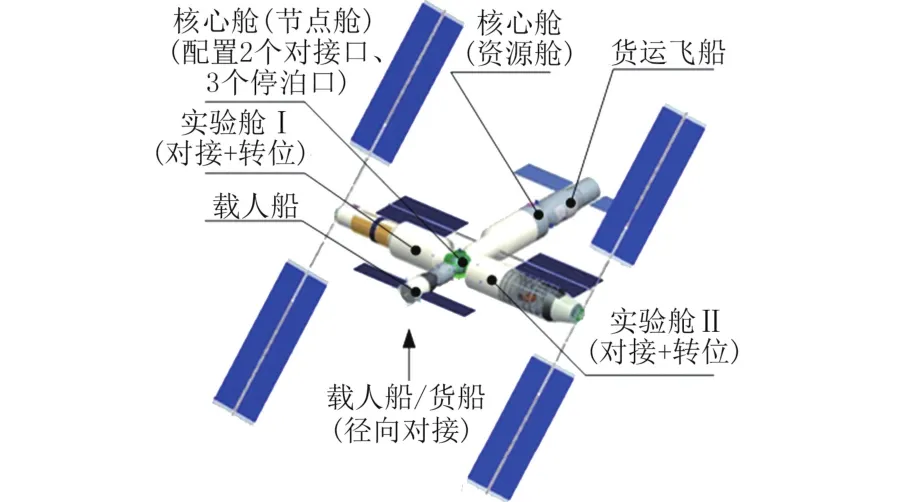
圖1 我國空間站構型示意圖Fig.1 Configuration diagram of China's space station
根據以上系統規劃,空間站核心艙的節點艙基體為一球形,如圖2,在球形基體上幾何對稱布置6個擴展口,其中一個擴展口延伸連接核心艙主艙體,四個側向對接口和前端軸向對接口裝有被動對接機構。來訪航天器軸端安裝有主動對接機構,用以實現和空間站節點艙的軸向對接。空間站翻轉式轉位機構能夠用于將上述實驗艙Ⅰ和實驗艙Ⅱ從軸向對接口轉位至相應的側向對接口。
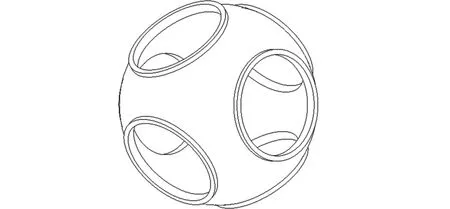
圖2 核心艙的節點艙球形基體構型Fig.2 Spherical basic configuration of the core module's transfer adapter
2.2 實驗艙轉位組裝過程分析
根據文獻[3],和平號空間站上配置有轉位機構。翻轉式轉位機構由主動端轉臂和被動端基座組成,其中主動端轉臂安裝在待轉艙上,被動端基座安裝在節點艙上。節點艙同樣為球形基體結構,四個側向對接口和前端軸向對接口裝有被動對接機構。來訪航天器軸端安裝有主動對接機構,用以實現和空間站節點艙的軸向對接。整個轉位過程由轉位機構與對接機構共同作用完成,轉位機構和對接機構在艙體上的布局如圖3[3]。
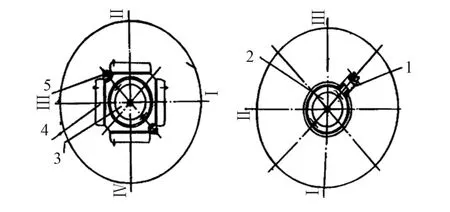
圖3 待轉艙上的轉臂和節點艙上的基座Fig.3 The manipulator arm on the lab and the mating sockets on the core module
和平號空間站上的翻轉式轉位機構主動端轉臂具有2個旋轉關節和一個捕獲連接機構;轉位機構被動端基座與轉臂配合完成相應動作。如圖4所示[3]。轉臂與基座的捕獲連接和解鎖功能由主動端轉臂驅動實施。轉位機構的工作過程類似于登山運動,首先對接機構保持連接情況下實現轉位機構主被動端轉臂和基座的捕獲連接,然后在轉位機構連接的情況下,對接機構解除連接,由轉位機構將艙體轉移到側向,再由對接機構實現捕獲連接[3]。
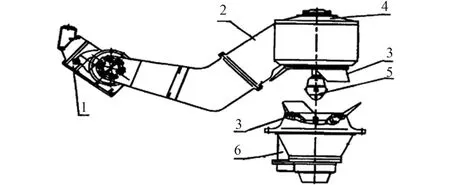
圖4 轉臂和基座Fig.4 The manipulator arm and the mating socket
參考和平號空間站的組建過程,采用類似和平號轉位方案,利用翻轉式轉位機構進行空間站實驗艙Ⅰ和實驗艙Ⅱ的組建過程如下:1)實驗艙Ⅰ與核心艙的節點艙建立軸向對接;2)轉位機構在實驗艙Ⅰ與節點艙之間建立剛性連接;3)實驗艙Ⅰ與節點艙解除軸向對接;4)轉位機構將實驗艙Ⅰ轉位至節點艙側向對接口;5)轉位機構狀態保持,實驗艙Ⅰ與節點艙建立側向對接;6)轉位機構解除實驗艙Ⅰ與節點艙之間的剛性連接。
實驗艙Ⅱ的組裝過程與實驗艙Ⅰ相同,轉位至另一側向對接口。具體過程如圖5所示。
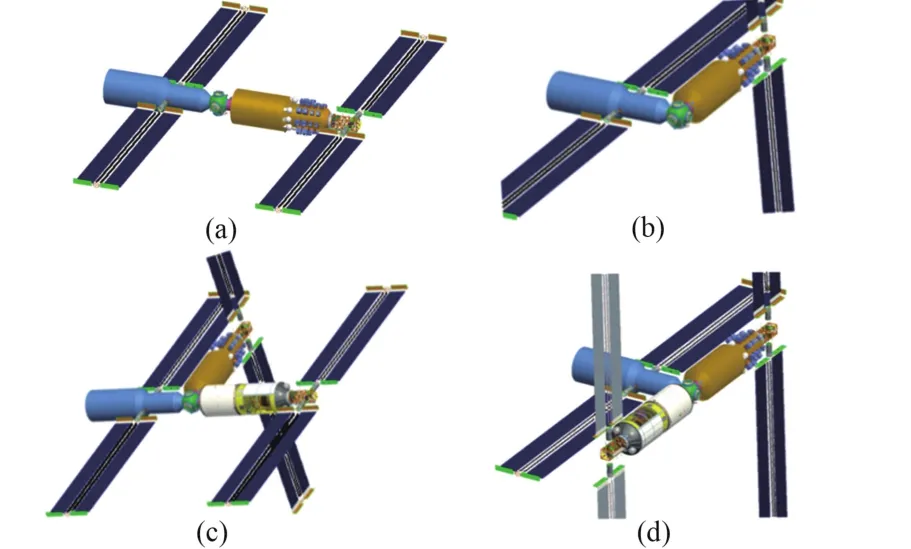
圖5 利用翻轉式轉位機構進行空間站實驗艙Ⅰ和實驗艙Ⅱ組建過程示意圖Fig.5 Process diagram of labⅠand labⅡassembling by tilting transfer mechanism
2.3 功能分析
在將實驗艙從軸向轉位到側向的動作之前,轉位機構主被動端之間需要進行捕獲和連接;在建立了可靠的剛性連接之后,將實驗艙從軸向對接口轉位到側向對接口;在側向對接口,為了克服對接機構側向捕獲過程中的作用力,轉位機構需要具有位置保持功能,以支持對接機構實現側向捕獲;在對接機構側向對接捕獲完成后,轉位機構主被動端之間進行解鎖、分離,解除實驗艙與節點艙之間的約束后對接機構實現側向剛性連接。功能可以歸納如下:
1)捕獲:在規定的初始條件下,實現轉臂與基座的捕獲;
2)連接:在實驗艙和節點艙之間提供所需連接力并達到一定連接剛度,連接過程中能夠校正轉臂與基座的位姿誤差,轉位過程中能夠保持連接狀態;
3)轉位:能夠將實驗艙I和實驗艙II從節點艙軸向轉至側向預定停泊口,完成啟動、轉動、緩沖、制動過程;
4)位置保持功能:肩關節和腕關節能夠實現相對位置的保持并在一定負載下不產生角位移;
5)解鎖:解除轉臂和基座之間剛性的連接,轉臂故障模式下,基座具備備份解鎖功能;
6)分離:解除轉臂與基座的接觸,克服分離過程中的負載,為側向對接提供空間。
3 實驗艙翻轉式轉位路徑設計
翻轉式轉位機構在實驗艙Ⅰ與節點艙之間建立剛性連接后將實驗艙從軸向到側向的轉位功能時,根據轉位機構運動自由度的不同,會有多種轉位路徑。在確定翻轉式轉位機構系統方案時,以簡單可靠機構自由度最少為原則進行轉位功能實現過程的路徑設計。下面對實驗艙從軸向轉位到側向所需的最少運動自由度進行分析。
3.1 擺動旋轉運動自由度
在空間站艙段組裝時,每個實驗艙需要配置一套轉位機構。如果在節點艙上相應地只配置一套轉位機構,又要求能轉位到四個側向對接口中的任意一個側向對接口,則翻轉式轉位機構需要設計為多自由度機械臂系統。相反地,如果在節點艙上相應地分別配置四套轉位機構,分別將實驗艙轉位到四個側向對接口,實現功能的同時也增加了轉位機構的重量。因此從自由度最少和系統質量最輕的角度出發,節點艙上轉位機構的配置方案如下:
在節點艙上布置兩套轉位機構,分別在節點艙軸向對接口和相鄰兩側向對接口中心與節點艙球形基體的球心所組成的正立方體的對角線處,即圖6所示球心與o點所連直線,并將此直線作為艙體從軸向對接口擺動到側向對接口的擺動旋轉軸線,從而使得軸向、相鄰的側向共3個對接口相對該對角線的空間轉角均相同,即120°,實驗艙從軸向對接口到達相鄰的兩個側向對接口為對稱動作。
空間站組建過程中,應預先設定實驗艙上轉位機構與節點艙上轉位機構的對應位置,從而確定由軸向對接口向預定的側向對接口轉位。
基于節點艙上轉位機構最優的配置方案,即節點艙上兩兩相鄰側向對接口間布置一套轉位機構,節點艙上共配置兩套轉位機構的布局方案,轉位機構需要設計一個繞正立方體對角線(如圖6所示)旋轉的擺動旋轉自由度以驅動實驗艙從軸向對接口擺動到預定的側向對接口。
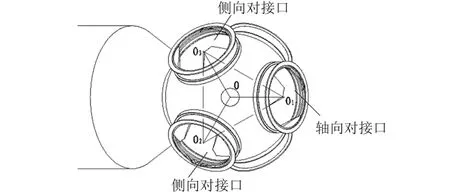
圖6 艙體擺動旋轉軸線Fig.6 The axis of lab swing rotation
3.2 軸向運動自由度
我國空間站規劃使用周邊式對接機構,根據文獻[8],我國應用于神舟飛船和天宮目標飛行器實現交會對接的周邊式對接機構采用導向瓣內翻的異體同構周邊式構型。對接過程主要包括對接環推出準備、接觸與緩沖、捕獲、緩沖與校正、拉近、剛性連接等步驟,其過程如圖7所示。
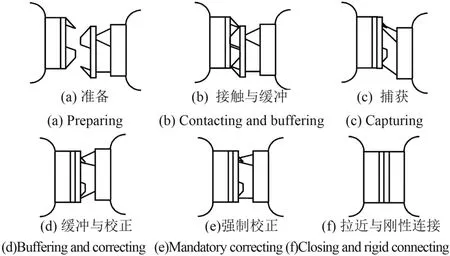
圖7 對接機構工作過程Fig.7 Docking process
對接機構對接框上裝有導向板、導向銷、導向套、分離推桿和鎖系,導向板為空間交錯分布,導向銷與分離推桿在圓周上非均勻分布,如圖8所示[9]。轉位機構如果在主被動對接機構拉緊時實現捕獲連接,并在此狀態下將艙體直接擺動到側向將必然會出現結構的干涉,需要使實驗艙與節點艙兩對接機構端面分開一定的距離。該推出運動自由度可由主動對接機構將對接環推出實現,因此不需要轉位機構設計相應的運動自由度。
3.3 上下翻轉旋轉運動自由度
根據周邊式對接機構推出能力,在對接機構達到其最大推出距離時進行繞前述擺動旋轉軸的旋轉運動并考察干涉情況,分析知主動對接框I、IV象限導向套與被動框I、II象限導向套會接觸干涉,因此轉位擺動旋轉運動前需要增加一個艙體上翻旋轉動作,對應的轉位擺動旋轉運動后有一個艙體下翻旋轉動作,上翻旋轉運動如圖9所示。同時,上翻旋轉后實驗艙質心距離擺動旋轉軸距離減小,降低了擺動旋轉運動的轉動慣量。

圖8 導向板及銷(套)干涉檢查Fig.8 Guide pin and sleeve interference checking
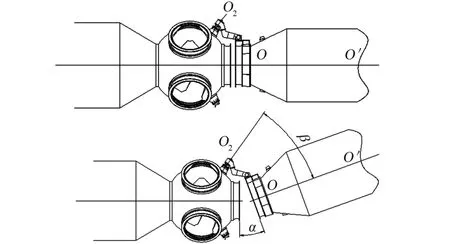
圖9 艙體上下翻轉旋轉運動軸線Fig.9 The axis of lab up and down tilting rotation
4 翻轉式轉位機構配置設計
轉位機構系統需要由主動端和被動端配合實現轉位功能,主動端是指主動驅動實施轉位機構間捕獲、連接和解鎖功能的部分,稱為轉臂;被動端是指配合主動端完成轉位機構間捕獲、連接和解鎖功能的部分,稱為基座。由于主動端與被動端分別配置于節點艙和實驗艙上,將導致不同的轉位機構系統設計方案。因此論述如下:
主動端轉臂和被動端基座在節點艙和實驗艙上的安裝方式分為兩種:一是轉臂裝在實驗艙上,基座裝在節點艙上;二是基座裝在實驗艙上,轉臂裝在節點艙上。主被動端這兩種不同的構型方式導致機構功能實現方案以及可靠性水平高低的不同。下面分三種不同方案進行分析比較(由于連接、解鎖、位置保持功能的實現不受機構構型的影響,因此不針對此三項功能進行對比分析)。
1)如圖10(a)所示,主動端轉臂安裝在實驗艙上,被動端基座安裝在節點艙上。捕獲、分離的旋轉運動和實驗艙翻轉運動由主動端轉臂實現。實驗艙擺動旋轉運動由主動端轉臂實現,旋轉軸為基座的旋轉中心。轉位機構為2自由度機構。
2)如圖10(b)所示,主動端轉臂安裝在節點艙上,被動端基座安裝在實驗艙上。捕獲、分離的旋轉運動和實驗艙翻轉運動由主動端轉臂實現。實驗艙擺動旋轉運動由主動端轉臂實現。轉位機構為2自由度機構。
3)如圖10(c)所示,主動端轉臂安裝在節點艙上,被動端基座安裝在實驗艙上。捕獲、分離的旋轉運動由主動端轉臂實現。實驗艙翻轉運動由被動端基座實現,實驗艙擺動旋轉運動由主動端轉臂實現。轉位機構為3自由度機構。
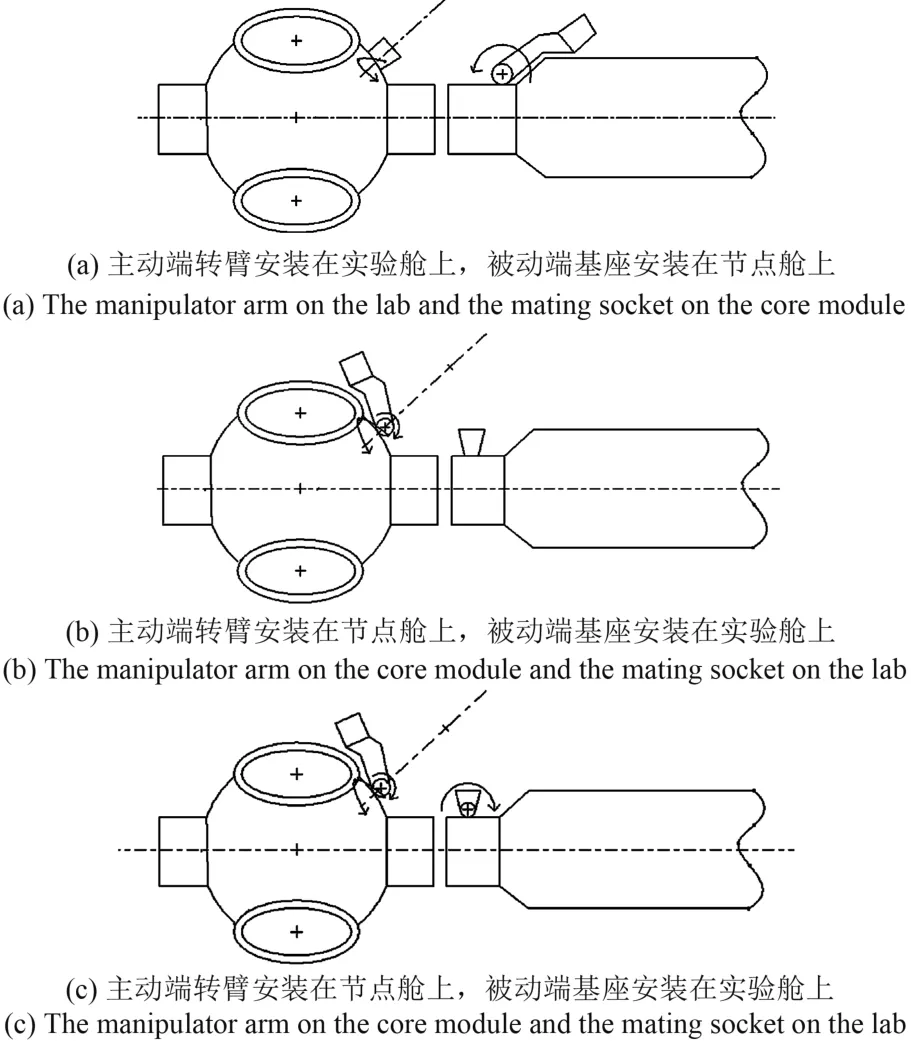
圖10 機構構型分析Fig.10 Analysis of the mechanism configuration
不同構型對比分析見表1,主要從三方面進行對比分析:一是轉臂和基座結構復雜程度;二是機構在軌運動時間及可靠性要求;三是完成空間站系統組建各個艙體上所需的轉位機構配套。
綜合分析,在系統配套質量可以接受的情況下,方案A為最優的構型方案,轉臂安裝在實驗艙上,基座安裝在節點艙上。
5 翻轉式轉位機構布局及原理設計
轉位機構具體組成及機械原理圖如圖11。其機械系統由轉臂、固定座和基座三個部分組成。基于上述分析確定轉臂和固定座安裝在實驗艙上,基座安裝在節點艙上。轉臂由兩個旋轉副和一個移動副組成,分別是肩關節驅動機構、腕關節驅動機構和捕獲連接機構。其中捕獲連接機構的萬向擺動組件頭部的捕獲錐頭與基座鎖鉤配合實現捕獲連接功能。肩關節和腕關節驅動機構用于驅動實驗艙兩自由度旋轉,固定座用于發射時將轉臂固定于艙體上。基座與轉臂配合完成動作。

表1 構型分析表Table 1 Analysis of the mechanism configuration
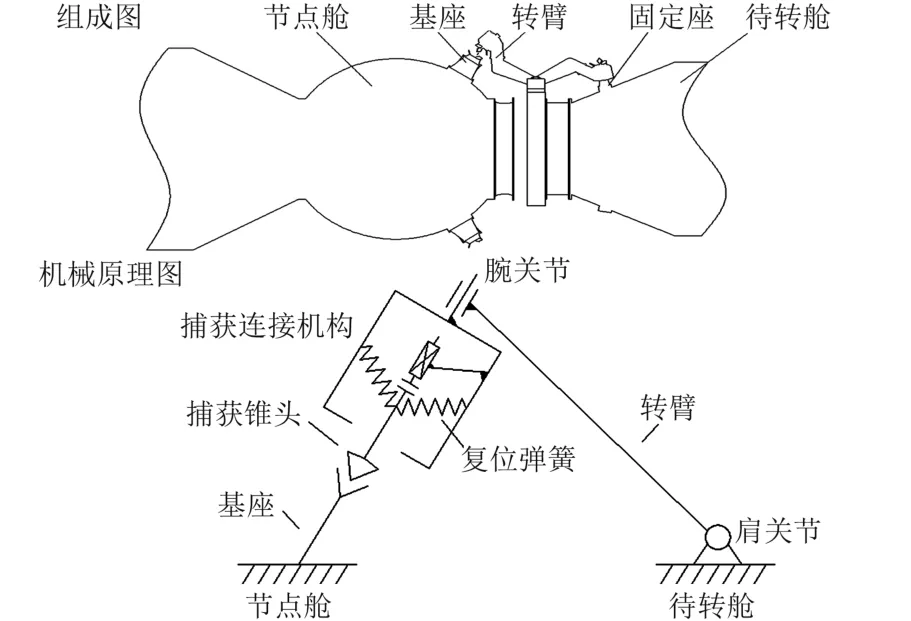
圖11 轉位機構布局及原理圖Fig.11 Layout and principle of the tilting transfer mechanism
6 實驗艙翻轉式轉位工作過程設計
實驗艙轉位組裝過程需要轉位機構與對接機構交互工作配合實現。實驗艙與節點艙軸向對接口通過周邊式對接機構實現鎖緊、密封并完成貨物轉運后,實驗艙準備進行轉位任務。
在轉臂與基座捕獲前,使對接機構捕獲鎖鎖緊、對接鎖解鎖。對接環推出至準備轉位位置(即推出至避免干涉的位置),進行轉臂和基座的捕獲。此時節點艙與實驗艙之間通過對接機構捕獲鎖鎖緊來保持連接狀態,轉臂與基座的捕獲初始條件主要由對接機構對接環推出偏差決定,而不依賴于兩航天器之間的位置姿態控制精度,因此在轉臂與基座的捕獲能力覆蓋捕獲偏差范圍的條件下能夠保證轉臂和基座的可靠捕獲。
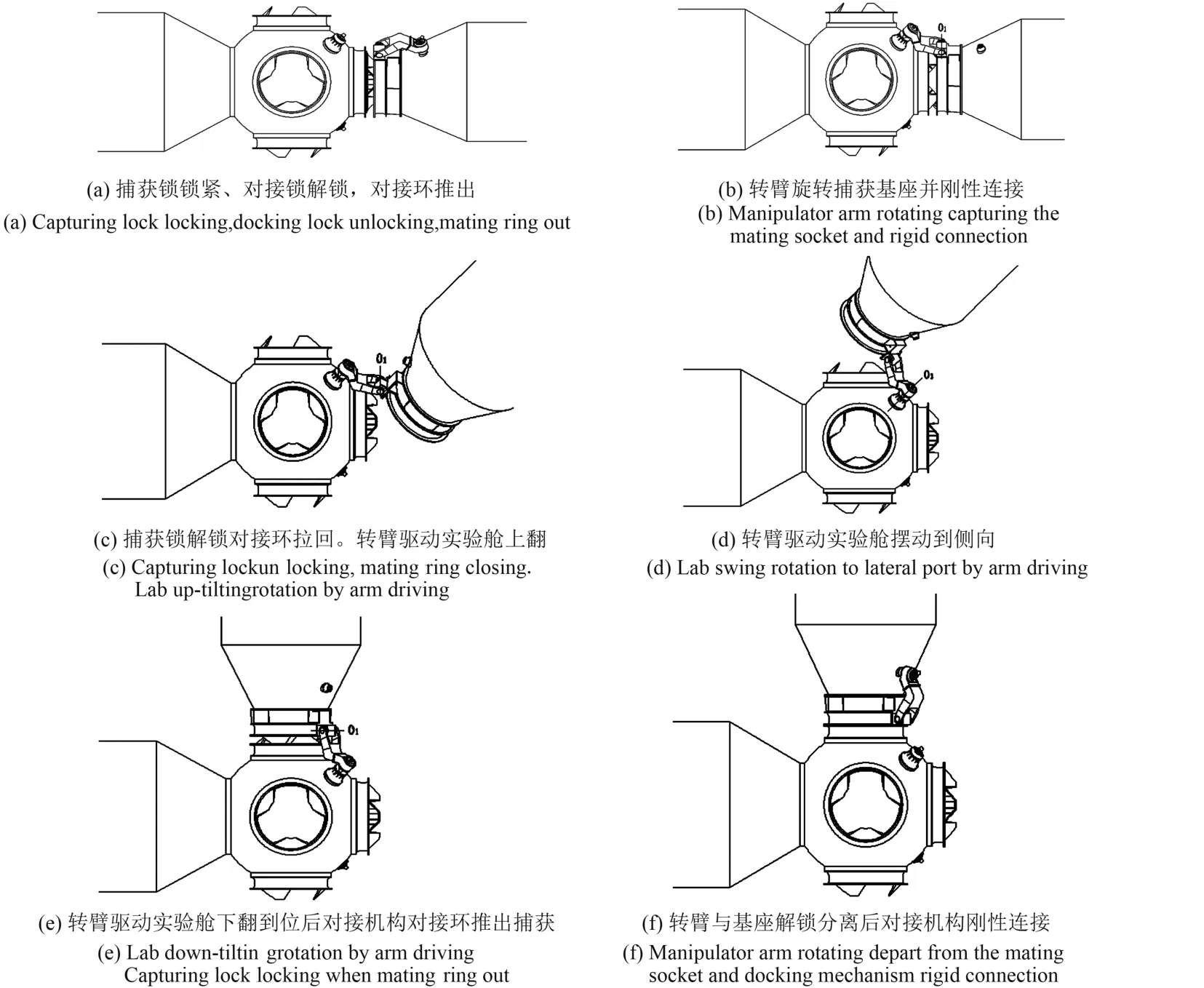
圖12 實驗艙翻轉式轉位工作過程Fig.12 Process of lab tilting transferring
轉位機構轉臂旋轉捕獲基座并剛性連接后,對接機構捕獲鎖解鎖,對接環拉回,以解除實驗艙與節點艙之間對接機構的約束。
轉位機構驅動實驗艙完成規劃的上翻、擺動和下翻的轉位路徑后,實驗艙到達側向對接口。
在側向對接口,通過轉位機構轉臂與基座之間的剛性連接來保證節點艙與實驗艙之間的相對位置,使對接機構可靠捕獲。在此過程中轉位機構需提供對接機構對接環推出捕獲鎖捕獲過程的支反力,對接機構側向捕獲完成后,轉位機構轉臂與基座間解鎖復位,對接機構對接環拉回,對接鎖鎖緊完成剛性連接密封。
上述轉位過程如圖12所示,轉位過程對接機構與轉位機構的協同交互配合關系如圖13所示[9]。

圖13 對接與轉位機構協同配合關系Fig.13 Docking and transferring's cooperate relationship
7 結論
與機械臂相比,轉位機構臂體長度小,自由度少,結構簡單,能夠安全可靠地完成艙體從軸向到側向對接口的轉位任務。但是轉位機構在完成轉位任務的同時,也具有一定的局限性,主要體現在以下三個方面:
1)功能單一,轉位機構僅用于艙體從軸向到側向的轉位,而不具有操作各種試驗載荷的功能;
2)艙體象限的90°翻轉,如前所述,轉位機構基座為軸向對接口和相鄰兩側向對接口間的對稱放置,擺動旋轉角度為120°,擺動旋轉運動后,艙體象限會發生90°翻轉,在實驗艙內設備不允許進行翻轉的情況下將無法使用此轉位方案;
3)轉位方案基于對接機構具有主動推出能力的情況下進行機構自由度設計,因此如果與之匹配的對接機構不具有軸向推出運動的自由度,則轉位方案將需要增加這一直線運動自由度。
(
)
[1] 袁建平,羅建軍.空間站的發展及我國發展空間站的意義[J].世界科技研究與發展,1998,20(6):99-101.
Yuan Jianping,LuoJianjun.The Development of Space Station &the Significance of Developing Space Station In China[J]. The Scientific Research and Development,1998,20(6):99-101.(in Chinese)
[2] 周以蘊.前蘇聯/俄羅斯載人空間站的發展[J].國際太空,1996(2):20-25.
Zhou Yiyun.The Former Soviet Union/Russia's Development of Manned Space Station[J].The International Space,1996 (2):20-25.(in Chinese)
[3] Syromiatnikov V S.Manipulator system for module redocking on the Mir Orbital Complex[C]//Robotics and Automation,1992.Proceedings.,1992 IEEE International Conference on. IEEE,1992:913-918.
[4] 劉艷.艙體轉位機構方案研究[D].上海:上海宇航系統工程研究所,2007.
Liu Yan.The Study of Module Transfer Mechanism System Scheme[D].Shanghai:Aerospace System Engineering Shanghai,2007.(in Chinese)
[5] 鄧偉.伸向太空的巨臂[J].太空探索,2005(9):20-23.
Deng Wei.Huge Mechanical Arm Extended to the Space[J]. SPACE EXPLORATION,2005(9):20-23.(in Chinese)
[6] 陳善廣,陳金盾,姜國華,等.我國載人航天成就與空間站建設[J].航天醫學與醫學工程,2012,25(6):391-396.
Chen Shanguang,Chen Jindun,Jiang Guohua,etc.Achievements of Manned Space Program and Construction of Space Station in China[J].Space Medicine&Medical Engineering,2012,25(6):391-396.(in Chinese)
[7] 王永志.實施我國載人空間站工程推動載人航天事業科學發展[J].載人航天,2011,17(1):1-4.
Wang Yongzhi.Launching Manned Space Station and Promoting the Development of China's manned space Engineering [J].Manned spaceflight,2011,17(1):1-4.(in Chinese)
[8] 陳寶東,唐平.空間對接機構技術及其研制[J].上海航天,2006,22(5):6-8.
Chen Baodong,TangPing.The Technology Development of Docking Mechanism System[J].AEROSPACE SHANGHAI,2006,22(5):6-8.(in Chinese)
[9] 沈曉鵬.空間站艙體轉位機械臂研究[D].上海:上海宇航系統工程研究所,2009.
Shen Xiaopeng.The Study of Space Station Module Transfer Mechanism System Scheme[D].Shanghai:Aerospace System Engineering Shanghai,2009.(in Chinese)
Scheme Design of Tilting Transfer Mechanism for Space Station Assembling
LIU Yan,SHEN Xiaopeng,HU Xueping,GENG Haifeng,WEI Zhi
(Aerospace System Engineering Shanghai,Shanghai 201109,China)
For the space station project of China,referring the experience of the Mir space station construction,this paper proposed a tilting transfer technology solution suitable for China's space station construction.First,the lab and the core module was docked along the axial through the docking mechanism.Then tilting transfer mechanism was used to transport the lab to the lateral interface and support the docking mechanism to complete the transposition of lateral docking assembly.Through the task and function analysis,the mechanism configuration analysis,and the degree of freedom analysis,the principle of tilting transfer mechanism,the specific composition and layout,the working process of the system as well as the working sequence were determined.Its advantages and limitations were analyzed which may provide valuable references for the space station project.
space station;tilting transfer mechanism;scheme design
V423.7
A
1674-5825(2015)06-0575-07
2015-03-23;
2015-08-14
上海市科學技術委員會資助項目(15XD1524000)
劉 艷(1981-),女,碩士,高級工程師,研究方向為空間機構系統設計及可靠性設計。E-mail:87144831@qq.com
