氣動肌肉-氣缸并聯平臺結構設計及位姿控制
2015-10-24 01:08:50陶國良
浙江大學學報(工學版) 2015年5期
關鍵詞:模型
陶國良,左 赫,劉 昊
(1.浙江大學機械工程學系,浙江杭州310027)
氣動肌肉-氣缸并聯平臺結構設計及位姿控制
陶國良,左 赫,劉 昊
(1.浙江大學機械工程學系,浙江杭州310027)
為改進傳統氣缸驅動并聯平臺剛度低、難以控制的缺點,提出一種由3根氣動肌肉和一個氣缸混合驅動的并聯平臺.該平臺具有橫搖、縱搖、升沉3個方向上的自由度,其中由氣缸控制的平臺等效剛度控制系統和由3根氣動肌肉控制的平臺位姿控制系統自然分離,降低了控制器的設計難度.在對并聯平臺系統進行建模分析的基礎上,采用氣缸與氣動肌肉控制相對獨立的控制策略,針對氣動肌肉強耦合、高度非線性的力學特性,設計一種自適應魯棒控制器對并聯平臺的運動進行位姿控制.仿真結果表明,該控制器能夠獲得高精度的平臺位姿軌跡跟蹤控制效果,其中在線參數辨識部分能夠對非線性模型補償算法進行實時修正,同時控制器具有良好的魯棒性.
氣動肌肉;并聯平臺;結構設計;建模仿真;自適應控制;位姿控制
并聯平臺是由多個執行器對同一運動平臺作用控制運動及位姿狀態的機構,具有良好的剛度特性,在并聯機床、機器人、定位與測量裝置、模擬器和醫療、娛樂設備上得到了廣泛的應用[1-2].氣動并聯平臺具有成本低、清潔無污染、生物適應性好等優點,但也由于工作介質的彈性特性使得位姿控制精度往往不高[3].
氣動肌肉是一種利用壓縮氣體的能量產生軸向拉力的力驅動器,可以近似等效于一個變原長變剛度的非線性彈簧裝置[4].氣動肌肉與傳統的氣動執行器相比具有較高的剛度特性和功率質量比,便于進行精確的位置控制[5],氣動肌肉與生物肌肉相似的力學特性也意味著一定意義上的生物柔順性[6].
本文設計了一種由氣動肌肉和氣缸混合驅動的新型并聯平臺,在對并聯平臺系統進行詳細建模分析的基礎上,設計了自適應魯棒控制器對并聯平臺進行位姿控制,并在理論及仿真實驗中對控制器有效性加以驗證.
1 高精度并聯平臺設計
1.1 并聯平臺結構設計
本文所設計的氣動肌肉和氣缸混合驅動的并聯平臺,具有橫搖、縱搖、升沉3個方向上的自由度.并聯平臺由一個氣缸和3根氣動肌肉耦合驅動,氣缸對運動平臺提供向上的支撐力,3根氣動肌肉提供控制運動平臺所需的轉動力矩,并聯平臺結構及氣路如圖1、2所示.
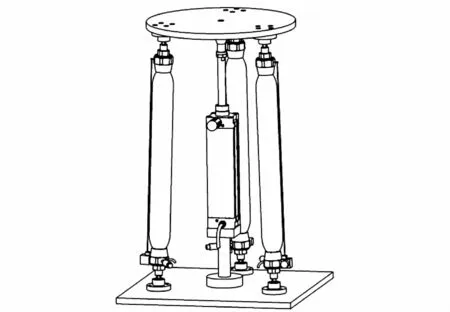
圖1 并聯平臺結構示意圖Fig.1 Schematic diagram of parallel platform structure
該機構除了具有其他并聯平臺的優點外,還具有以下特點:1)平臺剛度由氣缸獨立控制,可實時調節平臺的動態剛度,也可保持平臺在運動過程中動態剛度相對不變.2)具有升沉、橫搖、縱搖這3個應用最為廣泛的自由度.3)可在首搖方向進行小范圍自由運動,且氣動肌肉與人體肌肉力學特性相似,具有生物柔順性.4)并聯平臺結構對稱,不僅具有準確的運動學逆解,也可得出較為準確的運動學近似正解,便于位姿解算器的設計和控制算法的應用.
該平臺可以廣泛應用于飛行模擬器、醫療設備、射電望遠鏡陣列和動感座椅娛樂設備等.
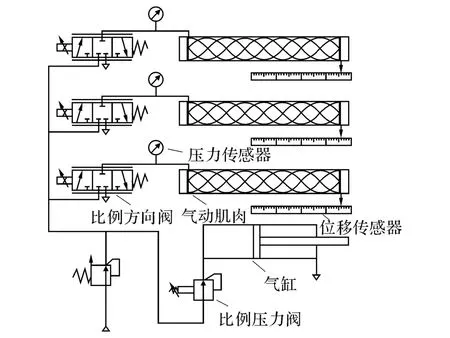
圖2 并聯平臺氣動系統示意圖Fig.2 Pneumatic System of Parallel Platform
1.2 并聯平臺控制策略設計
該并聯平臺采用氣缸與氣動肌肉控制系統相對分離的控制策略,每根氣動肌肉由一個正遮蓋的電氣比例方向閥進行控制,氣缸則由一個高精度電氣比例減壓閥控制.并聯平臺的位姿控制部分僅對3個比例方向閥進行控制,而氣缸輸出力控制部分完成平臺運行過程中保持氣缸作用腔壓力相對穩定的工作.由于運動平臺在首搖方向上運動較小且難以測量,小范圍首搖運動對平臺其他自由度影響也較小,故不對平臺在該自由度上運動進行測量及控制[7].
該控制策略具有以下優點:1)將氣缸控制系統與氣動肌肉控制系統分離,減小控制器設計難度.2)氣缸輸出力控制系統可以實時調節平臺的動態剛度,并可將實際氣缸作用腔壓力作為位姿控制器的實時輸入.3)并聯平臺位姿控制系統控制量為3個氣動比例方向閥的控制輸入,避免冗余控制量的產生.
2 高精度并聯平臺模型分析
2.1 并聯平臺運動學模型分析
運動平臺共有3個轉動自由度和一個移動自由度.取固定平臺中心為坐標系0,移動平臺中心為坐標系1.平臺工作空間到關節空間狀態變換公式如下:

式中:Li為第i根氣動肌肉對應長度向量,Ri為第i根氣動肌肉與固定平臺鉸接點在坐標系0中位置向量,r1i為第i根氣動肌肉與運動平臺鉸接點在坐標系1中位置向量,z為運動平臺沿z軸方向升沉高度,為坐標系1相對于坐標系0的旋轉變換矩陣,如忽略平臺繞z軸轉動,其表達式如下:
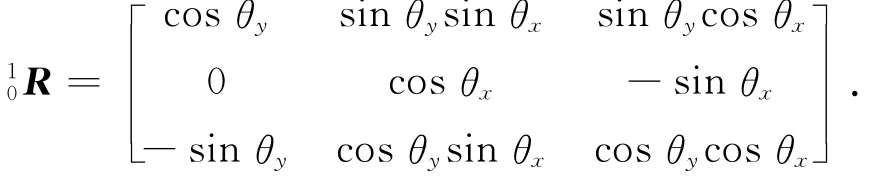
式中:θ為運動平臺RPY轉動角度,下標x表示繞x軸轉動,下標y表示繞y軸轉動.
2.2 并聯平臺動力學模型分析
首先對運動平臺的轉動運動學進行建模,對于運動平臺的轉動狀態分析如下[8]:

式中:Md(θ) 為運動平臺的慣性項,Cd(θ,˙θ)為運動平臺的哥式力項,Dd(θ) 為運動平臺的阻尼項.
各項具體表達式如下:

式中:Gd(θ) 為運動平臺的位姿RPY角度的導數到角速度之間的變換矩陣,I1(θ) 為運動平臺在坐標系1上的轉動慣量,為坐標變換后的角速度矩陣,J(θ) 為力矩計算矩陣,具體表達式為J(θ)=Jω(θ)Gd(θ),其中Jω(θ) 為移動平臺坐標系1到固定平臺坐標系0的力雅克比矩陣,F為氣動肌肉產生的拉力向量,CS為鉸鏈庫倫摩擦系數對角矩陣.
運動平臺在豎直方向上受力分析如下:

式中:md為運動平臺質量,mN為氣缸活塞及連接件質量,pN為氣缸作用腔壓力,AN為氣缸作用腔活塞面積,FfN為氣缸活塞所受摩擦力,g為重力加速度,ei(3)為氣動肌肉拉力方向單位向量的豎直分量,下標i表示第i根氣動肌肉.
2.3 氣動肌肉輸出力模型分析
氣動肌肉的力學分析采用如下的非線性氣動肌肉力-壓力-位移模型[9-10]:

其中:
式中:a、b為氣動肌肉結構所決定的參數,p為氣動肌肉內腔壓力,ke為氣動肌肉2個端頭非圓柱部分的體積修正系數,ε為氣動肌肉收縮率,Sc為等效摩擦作用面積,fs為氣動肌肉摩擦系數,x為氣動肌肉運動過程中的收縮量,α為氣動肌肉纖維編織網夾角,下標0表示氣動肌肉初始狀態,D為氣動肌肉內徑,L為氣動肌肉長度,tk為橡膠套筒橡膠層厚度,E為橡膠彈性模量,kFri為修正系數.
在實際應用中,氣動肌肉的模型更為復雜,影響因素較多,且具有慢時變特性,故需要加入自適應參數辨識算法對氣動肌肉的力學模型進行在線辨識及補償.
2.4 氣缸輸出力模型分析
氣缸對運動平臺的中心起支撐作用,其無桿腔的壓力由Festo公司MPPES比例減壓閥控制.首先根據所需的平臺剛度特性選定比例減壓閥設定值,在平臺運行過程中該設定值不會發生改變,且在閥口與氣缸之間增加適當容積的氣容以穩定氣缸無桿腔內氣壓.根據氣缸最大運行速度選用合適型號的比例減壓閥,以保證平臺運行過程中氣缸無桿腔壓力的基本穩定.由于氣缸無桿腔壓力會被傳感器測量,并被傳遞至之后的控制器中進行補償,故小范圍的壓力變化對控制效果影響不大.
假設氣缸無桿腔內部氣壓與比例減壓閥的模擬量設定值呈線性關系,公式如下所示:

式中:uN為比例減壓閥的設定量,pN0為比例減壓閥下游壓力與設定量之間的比例關系.
氣缸摩擦力的機理較為復雜,先后有許多靜態及動態模型被廣大學者提出并采用.其中Stribeck靜態模型結構較為簡單,不需要對摩擦力內部狀態進行動態分析,且能較為完整地反應氣缸摩擦力的各項特性,故使用Stribeck模型對氣缸摩擦力進行描述,模型如下[11]:

式中:FfNs為最大靜摩擦力,FfNC為庫倫動摩擦力, FfNv為黏性摩擦力系數,為局部極值點對應速度,δNs為Stribeck曲線系數.
2.5 氣動肌肉壓力模型分析
將氣動肌肉內腔氣體壓力變化過程近似為多變過程,以矩陣方式表示出來如下[12]:


式中:qm為通過比例方向閥質量流量,λ為多變指數,其值在1至1.4之間,p0為標準狀態下大氣壓力,R為標準狀態下氣體常量,T為環境絕對溫度, Vi、為氣動肌肉內腔體積及體積變化率.
2.6 比例方向閥流量模型分析
使用如下流量方程對氣體通過比例方向閥的流量特性進行建模[13]:

式中:p、T分別為氣體壓力及溫度,下標u表示閥口上游,下標d表示閥口下游,γ為標況下氣體的比熱比,空氣為1.4,Ae為比例方向閥的等效節流面積.
所使用的比例方向閥為Festo公司MYPE系列正遮蓋比例方向閥,在中位具有死區,非死區部分線性度較好,故使用如下模型對比例方向閥等效節流面積進行建模[14-15]:
式中:Ae0為等效節流面積比例系數,uu為充氣通路連通時的最小電壓,ul為放氣通路連通時的最大電壓,負值表示氣動肌肉處于排氣狀態.
2.7 模型仿真結果
由第2章模型分析結果可以看出,本課題所研究氣缸-氣動肌肉并聯平臺系統模型具有以下特點:1)模型復雜且包含大量難以求導的三角函數、非整數次乘方和有限平滑函數,不利于進行在此基礎上的大量計算(如求解雅克比矩陣、求解全微分方程等);2)模型具有很強的非線性特性,在工作點附近進行一次泰勒展開并不能很好地表現系統的動力學特性;3)模型中各狀態量相互耦合,運動平臺的受力與氣動肌肉內腔壓力和平臺位姿均密切相關,氣體動態過程和平臺運動過程不能相互分離;4)氣動肌肉和氣缸的輸出力平衡決定并聯平臺的最終平衡位姿,氣缸輸出力的大小決定系統內部耦合力的強弱和平臺的動態剛度,氣動肌肉內腔體積及其控制閥等效面積的關系是限制并聯平臺位姿運動速度的最重要因素.
根據第2章所得結果利用simulink工具箱對并聯平臺進行系統建模仿真,部分關鍵仿真參數如表1所示.
對并聯平臺模型進行開環信號仿真實驗.取3個比例方向閥的控制信號為在1、2、3 s時產生0到1的階躍信號,并聯平臺及氣動肌肉仿真結果如圖3所示,改變比例壓力閥的設定值,并調節氣動肌肉內腔壓力使得平臺在初始狀態時處于同一高度上.在0.5 s時刻引入對運動平臺豎直向下的100 N的干擾力,從而測試平臺剛度對平臺抗干擾能力造成的影響.平臺運動仿真結果如圖4所示.

表1 并聯平臺關鍵仿真參數Tab.1 Key Simulation Parameters of Parallel Platform
從運動仿真結果可以看出,增大氣缸作用腔壓力可以提高并聯平臺整體剛度,在相同干擾作用下剛度越高平臺進入穩定狀態所需時間就越短,造成的穩態影響也越小.但氣缸作用腔壓力的提高會帶來并聯平臺內部各鉸接點作用力的上升,實際運行過程中可能會引起鉸接點摩擦力的增加,同時氣缸作用腔壓力的一部分還要作為運動平臺負載的支撐力,故應根據實際需要合理設定氣缸作用腔壓力.
3 高精度并聯平臺控制器設計
3.1 基于反步法的ARC控制器設計及收斂性證明
由于氣動肌肉具有復雜的力-位移-壓力特性,基于模型線性化補償的控制策略容易引入較大的模型補償誤差,線性化后的模型與實際模型也有較大差距,難以獲得較好的控制效果.針對氣動肌肉強耦合、高度非線性的力學特性,本文采用反步法設計基于非線性模型的自適應魯棒控制策略(ARC)[16],在工作空間中對運動平臺進行高精度位姿控制.
步驟1:
設定系統狀態量為X=[θx,θy,z]T,忽略運動平臺繞z軸運動帶來的影響,將氣缸-氣動肌肉并聯平臺動力學模型寫為矩陣微分形式:

式中:A為運動平臺動力學慣性矩陣,fX( X)為模型已知非線性部分,
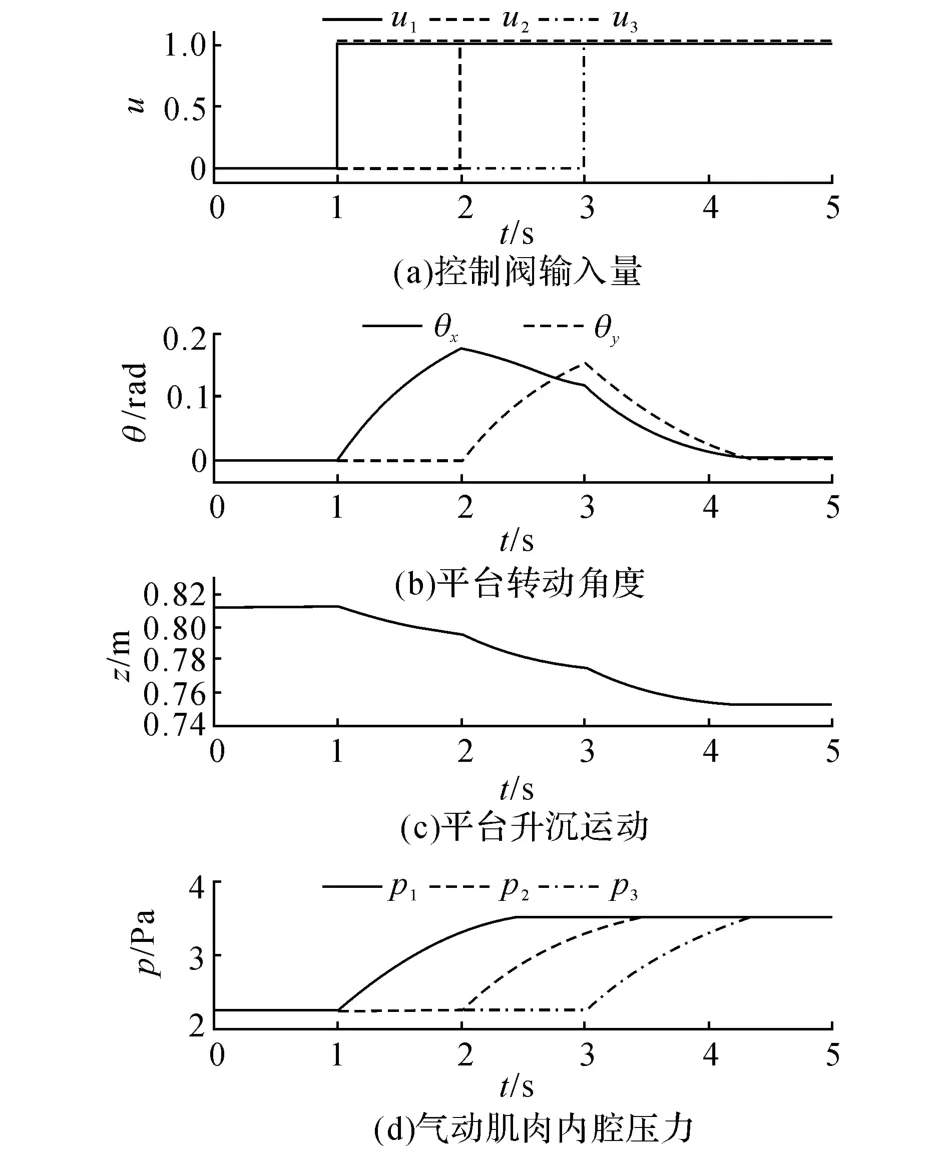
圖3 階躍信號仿真結果Fig.3 Simulation of Step Signal Input
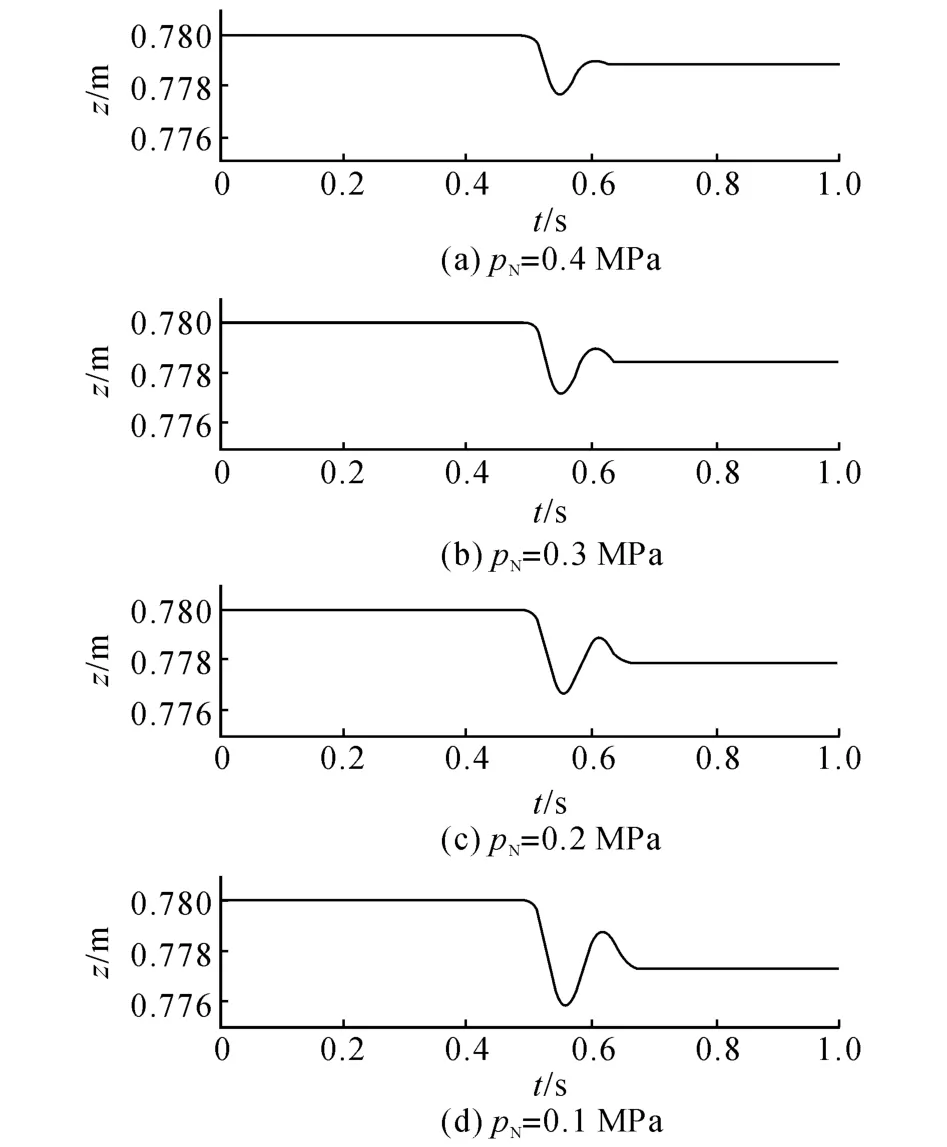
圖4 不同剛度平臺受外力干擾運動仿真Fig.4 Motion Simulation of Platform in Different Stiffness under Force Disturbance
設Xd為期望狀態量,Z1=Xd-X為狀態量控制誤差;Z2=+KSZ1,由Z1到Z2的傳遞函數可知,當Z2收斂于零時,Z1也收斂于零.



其中,TτX為氣動肌肉力矩轉換矩陣.根據氣動肌肉力學特點,選擇如下自適應參數矩陣:
對于自適應參數估計部分,為保持參數估計始終有界,采用如下的非連續參數投影算法:

設理想等效輸入力矩如下:

式中:τXda為非線性部分補償量,τXds1為保證系統處于切換層內部時的穩定收斂性,τXds2為保證系統魯棒性的模型不確定抑制量,應滿足
公式(16)中各部分表達式如下:


取半負定李雅普諾夫函數:

則有

此時,Z2將會以指數方式收斂于半徑以ε2相關的球域內,使得系統誤差有界.
步驟2:

式中:Fd為氣動肌肉理想輸出力向量.
將符號函數做連續化處理:

根據式(7),壓力層模型為

式中:τp=fp(x) q為等效輸入流量,為模型誤差及外界干擾.
設pd為期望氣動肌肉內部氣體壓力,Z3=pd-p為壓力控制誤差,則有

則式(22)變為

設fc3=˙pdc-gp,Δ3=p-˙pdu,則式(24)變為

設理想等效輸入壓力如下:

式中:τpda為非線性部分補償量,τpds1保證系統處于切換層內部時的穩定收斂性,τpds2為保證系統魯棒性的模型不確定抑制量,應滿足
各部分表達式如下:

設半負定李雅普諾夫函數

則有

根據以上不等式可得

此時,Z2和Z3將指數收斂于一定的與ε2和ε3相關的球域內,從而證明此控制算法可保證并聯平臺系統穩定性.
根據式(4)、(8)可以反求理想等效節流面積:
得出理想等效節流面積后,再根據比例方向閥死區特性式(9),對死區采用如下補償算法后即可計算控制輸出u:
3.2 位姿跟蹤控制仿真實驗
在第2章所建立模型中對該算法的有效性進行驗證.選取8 s為周期的正弦橫搖信號與10 s為周期的正弦升沉信號組成的復合信號作為運動平臺目標運動軌跡,進行運動平臺的多自由度位姿跟蹤控制仿真實驗.實驗中辨識參數的初值設定分別為30、15、5,在20 s時開始進行自適應參數辨識,仿真實驗結果如圖5所示.可以看到當自適應參數辨識部分起作用時,運動平臺的跟蹤誤差明顯減小.
在50 s時引入作用于運動平臺中心豎直向下的100 N的力作為干擾,并在60 s時去掉干擾力,運動平臺僅在干擾力發生變化的時刻發生少許振動,并在控制算法的作用下迅速恢復穩定.仿真實驗結果如圖6所示.
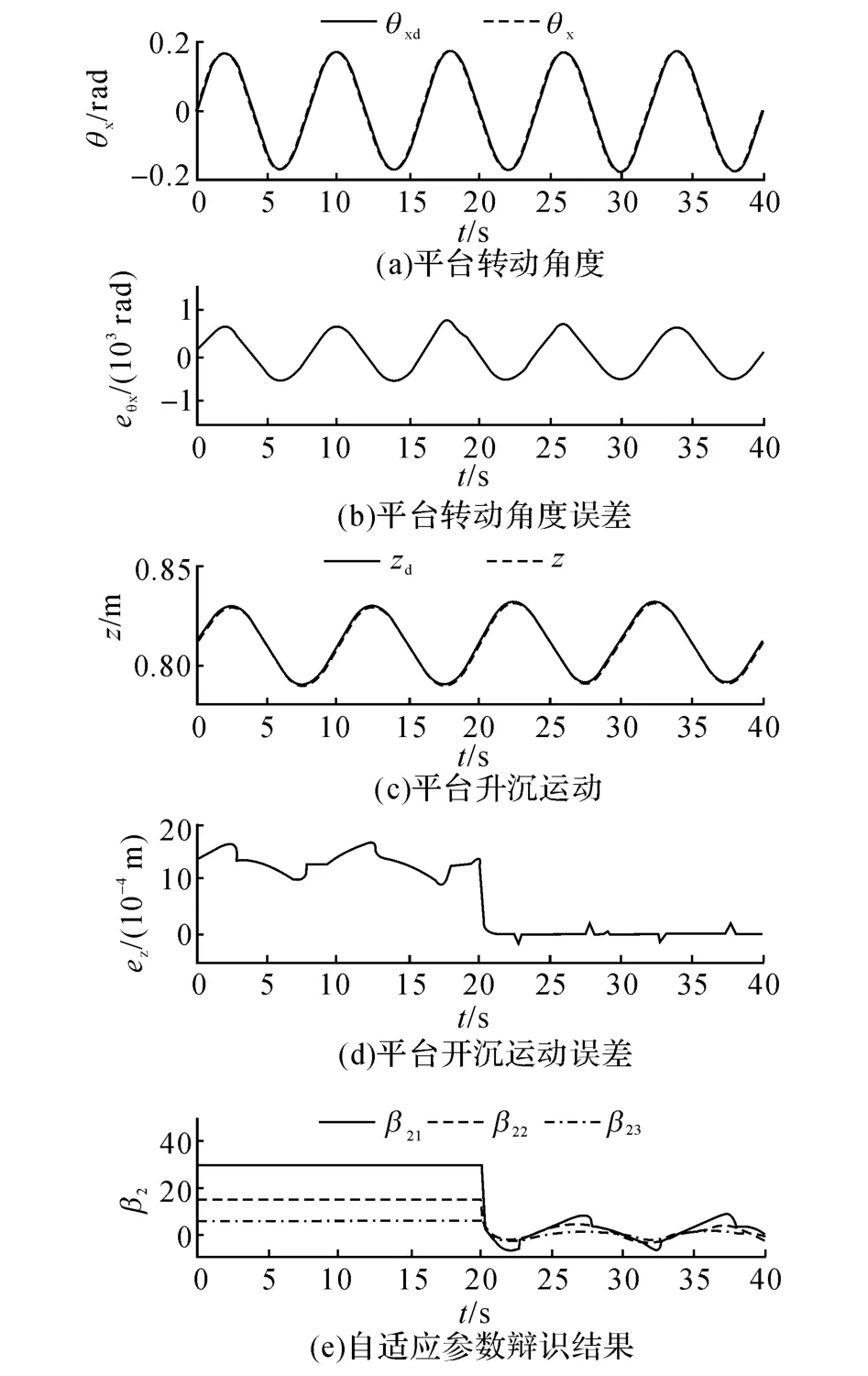
圖5 DARC控制策略仿真試驗結果Fig.5 Simulation of DARC Control Strategy
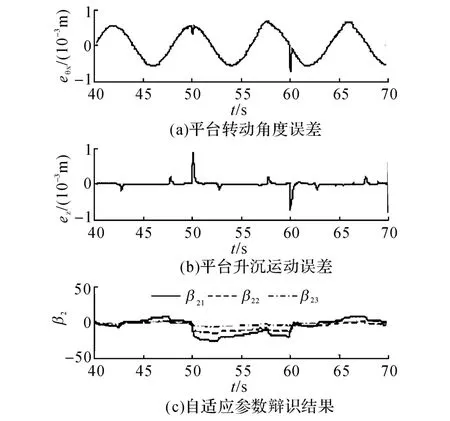
圖6 控制魯棒性仿真試驗結果Fig.6 Simulation of Control Robustness
由仿真實驗結果可以得出,所設計的DARC平臺位姿控制器具有以下特點:
1)控制精度較高,穩定狀態下各自由度最大位姿誤差均小于1%;
2)能夠實時辨識平臺參數,并利用辨識結果改善平臺位姿控制效果;
3)控制器對外界干擾不敏感,在引入干擾后能夠迅速完成干擾量的辨識和控制器的鎮定;
4)與圖3所示開環仿真結果對比可以看出該控制算法中的氣缸摩擦力補償部分具有較好的運動平臺振動抑制作用.
4 結 語
本文設計了一種新型三自由度氣動肌肉-氣缸并聯平臺,由比例減壓閥控制氣缸作用腔壓力,3個比例方向閥控制3根氣動肌肉長度及內腔壓力.該平臺采用氣動肌肉與氣缸相對分離的控制策略,在運行過程中可保持平臺剛度相對穩定,與傳統氣缸驅動并聯平臺相比具有剛度高、控制簡便等優點.在對并聯平臺進行建模研究及剛度特性研究的基礎上設計了自適應魯棒控制器,并完成了對該控制器的理論穩定性證明.仿真實驗表明該控制器能夠很好地進行高精度平臺位姿軌跡跟蹤控制,并且具有實時參數在線辨識能力和控制魯棒性.在完成實驗臺搭建工作后,下一步研究重點應為將所設計自適應魯棒控制器實現后作用于并聯平臺上,進行位姿軌跡跟蹤控制實驗并觀測控制器實際控制效果.
(Reference):
[1]MENG Wei,ZHOU Zu-de,LIU Quan,et al.A practical fuzzy adaptive control strategy for multi-DOF parallel robot[C]//Proceedings of the 2nd International Symposium on Computer,Communication,Control and Automation(ISCCCA-13).Paris:Atlantis Press,2013:620 -623.
[2]DASGUPTA B,MRUTHYUNJAYA T S.The Stewart platform manipulator:A review[J].Mechanism and Machine Theory,2000,35:15-40.
[3]武衛,王占林.基于小腦模型神經網絡的氣動六自由度并聯平臺的復合控制方法研究[J].機械科學與技術.2008,27(6):748-751.
WU Wei,WANG Zhan-lin.A compound control method for a six-DOF parallel pneumatic manipulator based on CMAC networks[J].Mechanical Science and Technology for Aerospace Engineering,2008,27(6):748-751.
[4]傅曉云,方敏,李寶仁.氣動人工肌肉剛度特性的分析[J].機床與液壓,2007,35(2):109-111.
FU Xiao-yun,FANG Min,LI Bao-ren.Theoretic analysis of stiffness characteristics of the pneumatic muscle actuator[J].Machine Tool&Hydraulics,2007,35(2):109-111.
[5]施光林,沈偉.氣動人工肌肉并聯平臺自適應模糊CMAC姿態跟蹤控制[J].中國機械工程,2012,23(2):171-176.
SHI Guang-lin,SHEN Wei.Adaptive fuzzy CMAC position tracking control of parallel platform based on pneumatic artificial muscles[J].China Mechanical Engineering,2012,23(2):171-176.
[6]JAMWAL P K,XIE Sheng-quan,AW K C.Design analysis of a pneumatic muscle driven wearable parallel robot for anlde joint rehabilitation[C]//Mechatronics and Embedded Systems and Applications(MESA).Qingdao:IEEE,2010:403-408.
[7]TAO Guo-liang,ZHU Xiao-cong,YAO Bin,et al.A-daptive robust posture control of a pneumatic muscles driven parallel manipulator with redundancy[C]//Proceedings of the 2007 American Control Conference.New York City,USA:IEEE,2007:3409-3413.
[8]朱笑叢,陶國良.氣動人工肌肉伺服平臺的建模.浙江大學學報:工學版[J],2004,38(8):1056-1060.
ZHU Xiao-cong,TAO Guo-liang.Modeling of a servo platform driven by pneumatic artificial muscles[J].Journal of Zhejiang University:Engineering Science, 2004,38(8):1056-1060.
[9]TONDU B,LOPEZ P.Modeling and control of Mc K-ibben artificial muscle robot actuators[J].Journal of Dynamic Systems,Measurement,and Control,2000,122(3):416.
[10]ZUO He,TAO Guo-liang,ZHU Xiao-cong.Modeling and enhancement of Mc Kibben pneumatic muscle actuators[J].Advanced Materials Research,2012,591-593:793-796.
[11]ANDRIGHETTO P L,VALDIERO A C,CARLOTTO L.Study of the friction behavior in industrial pneumatic actuators[J].ABCM Symposium Series in Mechatronics,2006,2(2):369-376.
[12]RICHER E,HURMUZLU Y.A high performance pneumatic force actuator system Part I-Nonlinear mathematical model[J].Issue of ASME Journal of Dynamic Systems Measurement and Control,2000,122(3):416-425.
[13]JAMES E B,BRIAN W M.Modeling,identification, and control of a pneumatically actuated,force controllable robot[J].IEEE Transactions on Robotics and Automation,1998,14(5):732-742.
[14]OLABY O,BRUN X,SESMAT S,et al.Characterization and modeling of a proportional valve for control synthesis[C]//Proceedings of the 6th JFPS International Symposium on Fluid Power.Tsukuba,Japan:Japan Fluid Power System Society,2005:772-76.
[15]孔祥臻,劉延俊,王勇等.氣動比例閥的死區補償與仿真.山東大學學報:工學版[J].2006,36(1):99-102.
KONG Xiang-zhen,LIU Yan-jun,WANG Yong,et al.Compensation and simulation for the deadband of the pneumatic proportional valve.Journal of Shandong University:Engineering Science[J].2006,36(1):99-102.
[16]YAO Bin,TOMIZUKA M.Adaptive robust control of MIMO nonlinear systems in semi-strict feedback forms[J].Automatica,2001,37:1305-1321.
Structure design and motion control of parallel platform driven by pneumatic muscles and air cylinder
TAO Guo-liang,ZUO He,LIU Hao
(1.Department of Zhejiang University,Hangzhou 310027,China)
In order to overcome the shortcomings of platforms driven by air cylinders such as low stiffness and controlling complexity,a parallel platform driven by three pneumatic muscles and one air cylinder was designed.The platform had three degrees of freedom,namely roll,pitch and heave.The stiffness of the parallel platform was controlled only by the air cylinder,while the posture was controlled by three pneumatic muscles,so the controller could be easily designed separately.Based on the modeling analysis of the parallel platform,a control strategy which separately controlled the air cylinder and pneumatic muscles was employed.To overcome the limitation caused by the coupling and nonlinear characteristics of pneumatic muscles,an adaptive robust controller(ARC)was designed for posture controlling of the parallel pneumatic platform.Simulation results show that the proposed ARC controller can achieve a high level of precision of trajectory tracking motion control.With the ability of online parameter identification,the ARC controller is able to modify the nonlinear compensation part based on the identification results.The robustness of the ARC controller is also verified in simulation experiments.
pneumatic muscle;parallel platform;structure design;modeling and simulation;adaptive control;posture control
10.3785/j.issn.1008-973X.2015.05.002
TP 273;TH 138
A
1008-973X(2015)05-0821-08
2014-03-12. 浙江大學學報(工學版)網址:www.journals.zju.edu.cn/eng
國家自然科學基金資助項目(51375430).
陶國良(1964-),男,教授,博導,主要從事氣動電子技術、氣動伺服控制、工業自動化控制和測試、燃料電池、空氣壓縮機及壓縮空氣氣動發動機等領域的研究.E-mail:gltao@zju.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19