船舶電站新型數(shù)字同步表的設(shè)計(jì)
2015-10-24 08:13:33徐恭德吳志良
船電技術(shù) 2015年12期
徐恭德,吳志良
(大連海事大學(xué) 輪機(jī)工程學(xué)院,遼寧省 大連 116026)
船舶電站新型數(shù)字同步表的設(shè)計(jì)
徐恭德,吳志良
(大連海事大學(xué) 輪機(jī)工程學(xué)院,遼寧省 大連 116026)
針對(duì)船舶電站準(zhǔn)同步并車的要求以及特點(diǎn),設(shè)計(jì)高精度新型數(shù)字同步表。以Proteus和Keil為實(shí)驗(yàn)平臺(tái),完成了相應(yīng)的軟件編程和外圍硬件電路的設(shè)計(jì),分析了主要技術(shù)環(huán)節(jié)的實(shí)現(xiàn)。仿真實(shí)驗(yàn)結(jié)果表明新型數(shù)字同步表的設(shè)計(jì)完全實(shí)現(xiàn)了針對(duì)待并發(fā)電機(jī)和電網(wǎng)電壓的頻差和相位差的檢測(cè)與顯示功能,且運(yùn)行可靠,檢測(cè)精度高,成本低。
船舶電站同步表相位檢測(cè)頻差單片機(jī)
0 引言
船舶電站由船舶發(fā)電機(jī)組和配電盤組成,是船舶電力系統(tǒng)的核心。為了滿足船舶供電的可靠性和經(jīng)濟(jì)性,船舶電站通常設(shè)有三或四臺(tái)同步發(fā)電機(jī)組作為主電源,規(guī)范亦要求至少設(shè)置兩臺(tái)船舶主發(fā)電機(jī)組。兩臺(tái)或兩臺(tái)以上的發(fā)電機(jī)同步并車過程中,通常由傳統(tǒng)電磁式同步表承擔(dān)對(duì)待并機(jī)和電網(wǎng)的頻率及相位的檢測(cè),滿足并車要求后主開關(guān)合閘,完成并車操作。
隨著船舶電站自動(dòng)化程度的不斷提高和微機(jī)控制技術(shù)的飛速發(fā)展,傳統(tǒng)的同步表在信息交互和精度方面已經(jīng)不能滿足船舶電站的并車要求,而逐步被新型數(shù)字同步表代替,因此新型高精度數(shù)字同步表的研究開發(fā)具有較高的實(shí)用價(jià)值。
新型數(shù)字同步表的設(shè)計(jì)采用89C51系列單片機(jī)作為核心控制器,可以大大降低成本。該型號(hào)單片機(jī)具有高度集成性,高可靠性,抗干擾能力強(qiáng),能夠滿足處于機(jī)艙內(nèi)工況條件惡劣的船舶電站要求。除此之外,該型號(hào)單片機(jī)控制能力強(qiáng),運(yùn)算速度快,I/O豐富,具有數(shù)據(jù)通信的能力,能夠進(jìn)行實(shí)時(shí)控制,滿足船舶電站準(zhǔn)同步并車操作的各項(xiàng)要求[1]。
1 新型數(shù)字同步表的工作原理
1.1同步并車要求
待并發(fā)電機(jī)投入電網(wǎng)運(yùn)行之前,它的某些參數(shù)必須滿足一定的要求才允許并車操作,否則可能會(huì)產(chǎn)生較大的沖擊電流,嚴(yán)重時(shí)會(huì)造成整個(gè)船舶電力系統(tǒng)崩潰。
經(jīng)理論和實(shí)踐證明,準(zhǔn)同步并車的三個(gè)限制條件為[2]:
1)待并發(fā)電機(jī)與電網(wǎng)的電壓差應(yīng)不得大于額定電壓的10%;
2)待并發(fā)電機(jī)與電網(wǎng)的頻率差應(yīng)嚴(yán)格限制在±1%額定頻率值以內(nèi);
3)待并發(fā)電機(jī)與電網(wǎng)電壓的初相位差應(yīng)限制在±15°以內(nèi)。
1.2同步表的工作原理
由于船舶發(fā)電機(jī)調(diào)壓器均能保證發(fā)電機(jī)的調(diào)壓特性滿足并車電壓條件的要求,因此,應(yīng)用同步表檢測(cè)并車條件,實(shí)際上是保證頻差和相位差在允許的限制條件內(nèi)。同時(shí),并車要求待并發(fā)電機(jī)頻率大于電網(wǎng)頻率即要求正頻差條件并車,因此,頻差方向的鑒別也是同步表應(yīng)考慮的條件之一。
本設(shè)計(jì)思路是通過電壓變換環(huán)節(jié)將待并發(fā)電機(jī)和電網(wǎng)電壓信號(hào)采集后,分別進(jìn)行數(shù)模轉(zhuǎn)換,一路送給頻差鑒別環(huán)節(jié)用于頻差方向的判斷,另一路直接進(jìn)行差分處理后得到頻差方波信號(hào)。單片機(jī)根據(jù)頻差方波信號(hào)和頻差方向鑒別信號(hào)運(yùn)行程序來驅(qū)動(dòng)指示燈旋轉(zhuǎn)。同時(shí)根據(jù)頻差的大小和頻差的方向進(jìn)行邏輯判斷來鑒別合閘信號(hào)。數(shù)字同步表原理框圖如圖1所示。
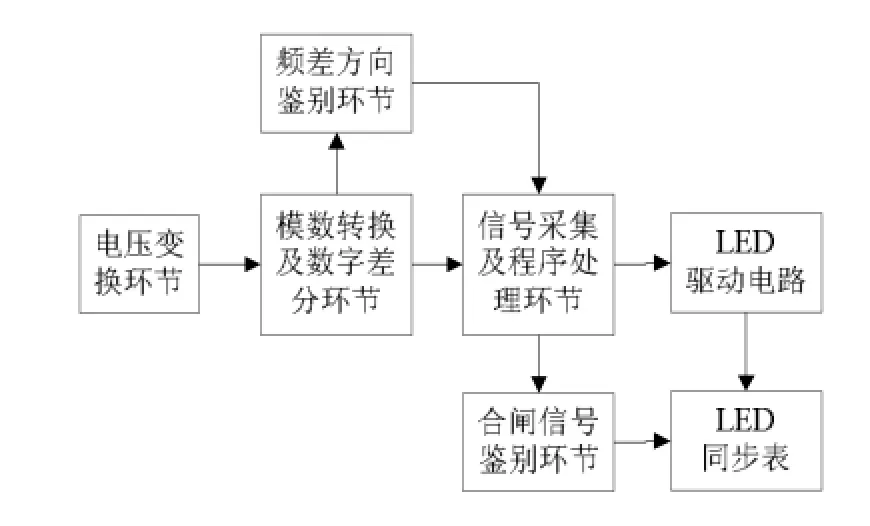
圖1 同步表原理框圖
1.3電壓信號(hào)的采集與處理
本文設(shè)計(jì)檢測(cè)電壓信號(hào)步驟如下:首先,將待并發(fā)電機(jī)側(cè)與母排側(cè)的電壓分別經(jīng)電壓互感器降至100 V;然后將電壓互感器的二次端再進(jìn)行降壓操作,將100 V電壓降壓到5 V;最后將同相同頻率 5 V正弦弱電壓送入到模數(shù)轉(zhuǎn)化電路[3]。
1.4頻率信號(hào)的采集與處理
頻率信號(hào)的采集與處理是實(shí)現(xiàn)同步表準(zhǔn)確測(cè)量待并機(jī)和電網(wǎng)頻率的基礎(chǔ)。本設(shè)計(jì)采用模數(shù)轉(zhuǎn)化環(huán)節(jié),將不易進(jìn)行測(cè)量的正弦波信號(hào)轉(zhuǎn)換成易于進(jìn)行測(cè)量的方波信號(hào)[4],轉(zhuǎn)換電路圖2所示:
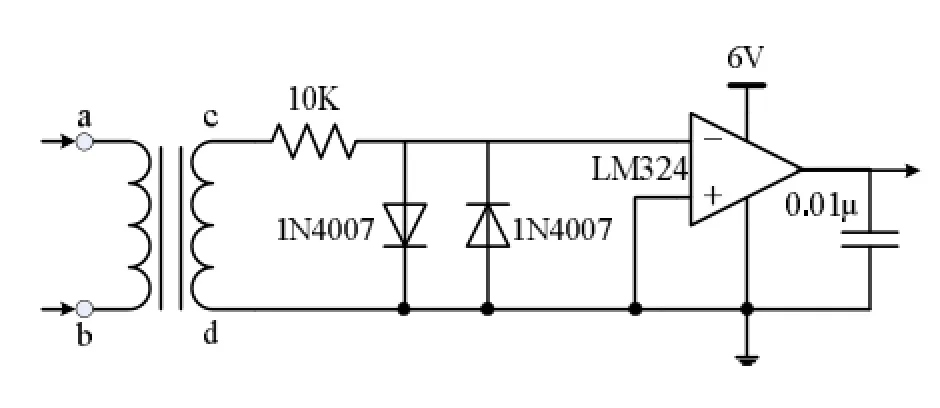
圖2 模數(shù)轉(zhuǎn)換電路圖
電壓信號(hào)將正弦波轉(zhuǎn)換成方波,一是方便測(cè)量信號(hào)的周期,用于頻差方向的檢測(cè),二是為信號(hào)差分做準(zhǔn)備,在此之后將兩路信號(hào)進(jìn)行差分,用于頻差相位的檢測(cè)。
1.5相位信號(hào)的采集與處理
相位信號(hào)的采集與處理是實(shí)現(xiàn)自動(dòng)準(zhǔn)同步并車功能的難點(diǎn)和關(guān)鍵環(huán)節(jié),亦是同步表設(shè)計(jì)的關(guān)鍵點(diǎn)。
本文采用放大器差分原理,將兩路方波信號(hào)分別輸入放大器的正相輸入端和反向輸入端,利用放大器的虛短和虛斷原理,將兩路信號(hào)差分后放大器飽和輸出,得到頻差相位的 PWM波[5]。PWM 波的信號(hào)脈寬是待并發(fā)電機(jī)和電網(wǎng)的兩路方波信號(hào)直接差分所得,是一個(gè)動(dòng)態(tài)的脈沖寬度由大約0 ms到10 ms變化的方波信號(hào),不同的脈沖寬度代表不同的頻差相位,單片機(jī)根據(jù)不同的脈沖寬度驅(qū)動(dòng)相應(yīng)的LED點(diǎn)亮。
如果待并發(fā)電機(jī)頻率ff大于電網(wǎng)頻率fw,在一個(gè)頻差周期里,頻差相位的PWM波是一個(gè)脈沖寬度由窄變寬再變窄的周期信號(hào);如果待并機(jī)的頻率小于電網(wǎng)的頻率,在一個(gè)頻差周期里,頻差相位的PWM波同樣也是一個(gè)脈沖寬度由窄變寬再變窄的周期信號(hào)。我們?nèi)∫陨蟽煞N情況的前半個(gè)周期如圖3所示。UF代表待并發(fā)電機(jī)電壓信號(hào),UW代表電網(wǎng)電壓信號(hào),代表待并發(fā)電機(jī)電壓方波信號(hào),代表電網(wǎng)電壓方波信號(hào),最下面的UM是頻差信號(hào)。
假設(shè)待并機(jī)頻率大于電網(wǎng)頻率,那么他們的頻差PWM是一個(gè)由窄變寬再變窄的周期。在這一個(gè)周期內(nèi),勢(shì)必在0點(diǎn)到6點(diǎn)的某一個(gè)脈寬值和6點(diǎn)到12點(diǎn)的某一個(gè)脈寬值相等,為了解決同步表的的LED的對(duì)應(yīng)問題,我們必須連續(xù)取相鄰的兩個(gè)脈寬,如果前一個(gè)脈寬小于后面一個(gè)脈寬,那么該脈寬肯在0點(diǎn)到6點(diǎn)的某一個(gè)位置;如果前面一個(gè)脈寬大于后面一個(gè)脈寬,那么此時(shí)該脈寬定在6點(diǎn)到12點(diǎn)的某一位置。這樣就解決了一個(gè)脈寬可能對(duì)應(yīng)兩個(gè)指示燈的情況。
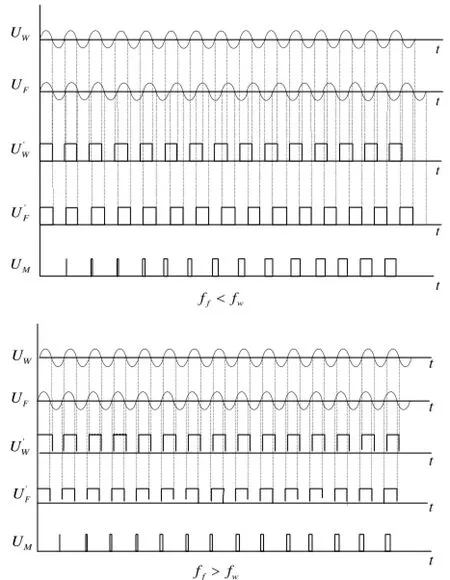
圖3 相位差PWM波的形成
1.6頻差方向信號(hào)的處理
同步表既可以順時(shí)針方向旋轉(zhuǎn),又可以逆時(shí)針方向旋轉(zhuǎn),通常順時(shí)針旋轉(zhuǎn)時(shí)為正頻差可以進(jìn)行并車操作,旋轉(zhuǎn)方向的鑒別需要對(duì)兩路信號(hào)頻率大小進(jìn)行判斷。這里我們采用單片機(jī)的定時(shí)計(jì)數(shù)器,對(duì)兩路信號(hào)的方波脈寬進(jìn)行計(jì)數(shù),通過比較兩路計(jì)數(shù)器的數(shù)值來判斷電網(wǎng)頻率和待并機(jī)頻率的大小,進(jìn)而來區(qū)分同步表LED燈的正反轉(zhuǎn)。
2 系統(tǒng)的工作流程
數(shù)字同步表工作流程如圖4所示。
1)檢測(cè)待并機(jī)頻率是否滿足要求,對(duì)數(shù)字同步表進(jìn)行上電初始化設(shè)置。
2)經(jīng)過數(shù)模變換環(huán)節(jié)后,將方波信號(hào)分別輸入2號(hào)單片機(jī)和數(shù)字差分環(huán)節(jié)[6]。
3)對(duì)待并機(jī)脈寬信號(hào)進(jìn)行測(cè)量,如果脈寬信號(hào)符合要求,一號(hào)單片機(jī)將進(jìn)行頻差脈寬的測(cè)量并運(yùn)行內(nèi)部程序,同時(shí)二號(hào)單片機(jī)采集兩路電壓信號(hào)的脈寬,判斷頻差方向[7]。
4)最后如果頻差周期在符合的要求范圍內(nèi),同時(shí)頻差方向?yàn)檎l差,同步表將指示可以進(jìn)行并車操作[8]。
3C主要技術(shù)環(huán)節(jié)的實(shí)現(xiàn)與分析
3.1S頻差信號(hào)的產(chǎn)生
采用最簡單的處理方式,將兩路方波信號(hào)運(yùn)用放大器差分,利用放大器的高倍增益和飽和輸出特性得到0 V和5 V的方波頻差PWM波[8]。
3.2雙單片機(jī)的分工合作
為了保證在并車過程中對(duì)頻差相位和頻差方向測(cè)量的實(shí)時(shí)性,采用雙51單片機(jī)并聯(lián)運(yùn)行的方式,用來減少單片機(jī)運(yùn)行程序?qū)y(cè)量帶來的系統(tǒng)誤差。一號(hào)單片機(jī)只負(fù)責(zé)頻差相位的檢測(cè)與處理,驅(qū)動(dòng)LED指示燈;二號(hào)單片機(jī)則負(fù)責(zé)頻差方向的檢測(cè)以及合閘操作指示。
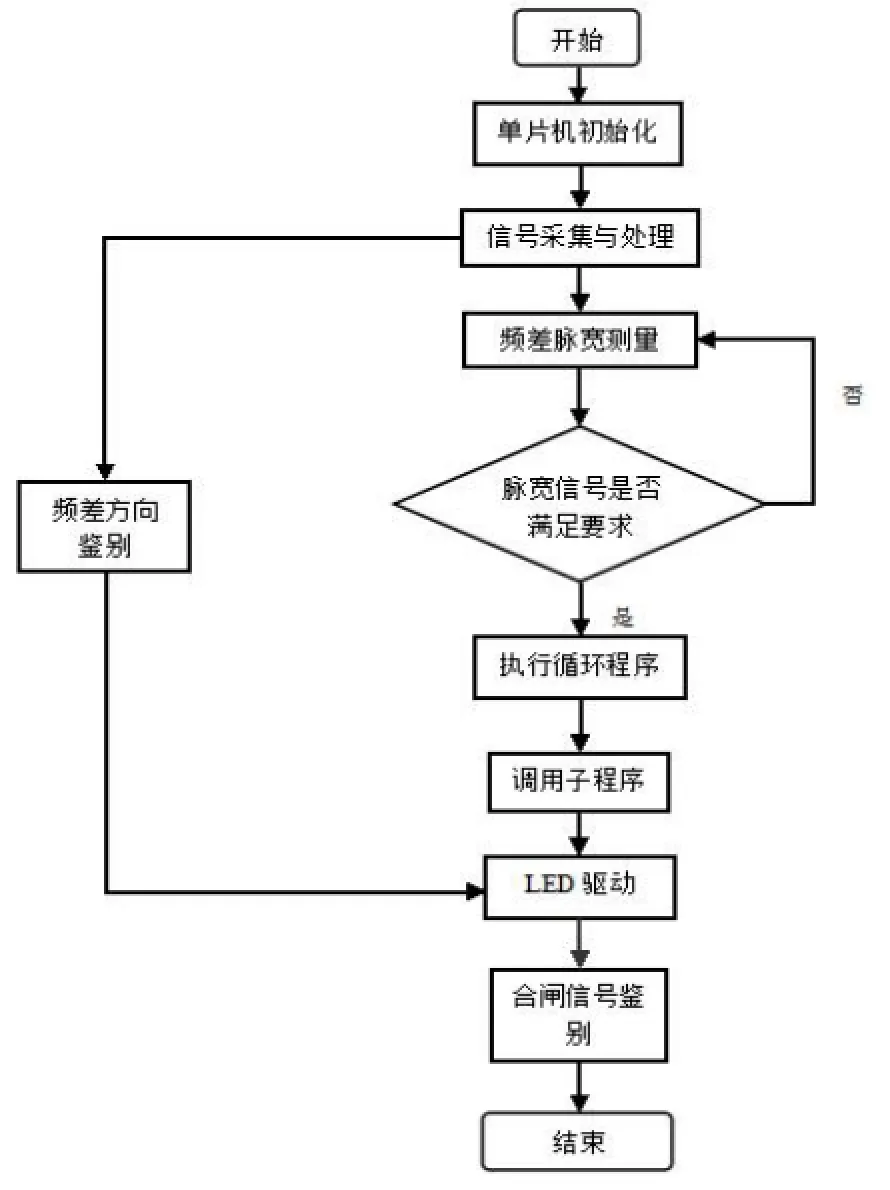
圖4 系統(tǒng)工作流程圖
兩臺(tái)單片機(jī)分工獨(dú)立合作,運(yùn)行兩套獨(dú)立的程序。二號(hào)單片機(jī)以一號(hào)單片機(jī)為主,運(yùn)行的頻差方向結(jié)果作為一號(hào)單片機(jī)程序的預(yù)備條件;一號(hào)單片機(jī)的運(yùn)行結(jié)果直接驅(qū)動(dòng)LED燈。
二號(hào)單片機(jī)實(shí)現(xiàn)功能相對(duì)簡單,所需要運(yùn)行的程序語句相對(duì)較少,為了保證程序的可讀性,測(cè)量的實(shí)時(shí)性,采用匯編語言。一號(hào)單片機(jī)是程序運(yùn)行的主機(jī)器,所需要運(yùn)行的程序語句量大,為了減小程序內(nèi)存,減少程序運(yùn)行的時(shí)間,采用C語言編程[9]。
3.3單片機(jī)基準(zhǔn)時(shí)鐘設(shè)置
因?yàn)椴捎秒p單片機(jī)控制和兩個(gè)獨(dú)立的單片機(jī)最小系統(tǒng),所以采用兩個(gè)獨(dú)立的晶振脈沖。由于兩臺(tái)單片機(jī)子運(yùn)行的程序不同,實(shí)現(xiàn)的功能也不同,兩臺(tái)單片機(jī)對(duì)應(yīng)的晶振不同。
一般來說,要想實(shí)現(xiàn)同步表的高精度測(cè)量,一號(hào)機(jī)的晶振脈沖越高越好,這樣程序運(yùn)行時(shí)間短,系統(tǒng)誤差可大大降低;另一方面,單片機(jī)存在晶振限制,所以不可能無限的提高晶振頻率,再者,晶振頻率的選擇要與單片機(jī)定時(shí)計(jì)數(shù)器相匹配,過高的晶振頻率可能要超過單片機(jī)計(jì)數(shù)器的最大值。除此之外,晶振頻率過高還可能導(dǎo)致同步表程序編程的困難,使同步表運(yùn)行的現(xiàn)象不理想。如果頻率過低,則系統(tǒng)誤差將會(huì)大大增加,同步表的準(zhǔn)確度將大大折扣,實(shí)時(shí)性也大大減弱,很可能出現(xiàn)程序跑不完的現(xiàn)象。
二號(hào)單片機(jī)晶振頻率的選擇,滿足在規(guī)定的頻差范圍內(nèi)能夠判斷頻差方向即可。二號(hào)單片機(jī)對(duì)實(shí)時(shí)性和精度要求沒有一號(hào)單片機(jī)高,所以晶振頻率可以低于一號(hào)單片機(jī)的晶振頻率。
3.4程序運(yùn)行時(shí)間與系統(tǒng)誤差
單片機(jī)運(yùn)行模式是實(shí)時(shí)控制的,程序的運(yùn)行周期與單片機(jī)的機(jī)器周期有關(guān),所以單片機(jī)是否能夠?qū)崟r(shí)的測(cè)量脈寬取決于機(jī)器周期的大小。
由于本設(shè)計(jì)只利用頻差信號(hào)的高電平,所以程序的運(yùn)行是否順利運(yùn)行完全取決于程序運(yùn)行的時(shí)間和頻差信號(hào)低電平時(shí)間的大小。一方面要控制運(yùn)行時(shí)間的大小,就得控制程序的大小,另一方面可以提高運(yùn)行速度,減小機(jī)器周期的大小。
在同步并車過程中,并車操作的相位差在±15?以內(nèi)就算符合要求,也就是說指示燈的個(gè)數(shù)不得少于24個(gè)。本設(shè)計(jì)采用36個(gè)LED指示燈,理論指示精度為10?,完全符合要求。
本設(shè)計(jì)采用指示燈均分的原理,將36個(gè)LED指示燈平均分配,半個(gè)頻差周期里有 18個(gè)指示燈。為方便計(jì)算,假設(shè)采用晶振頻率為12 MHz,一號(hào)單片機(jī)機(jī)器周期為t0=1 μs,電網(wǎng)電壓頻率為工頻50 Hz,當(dāng)待并機(jī)的頻率大于50 Hz時(shí),頻差最大脈寬為



在誤差最大處分析數(shù)據(jù),誤差僅為1.817?完全能夠滿足并車要求。
4 仿真實(shí)驗(yàn)結(jié)果
綜上所述,我們利用Proteus軟件和Keil軟件進(jìn)行仿真[10],仿真結(jié)果和預(yù)期結(jié)果完全一致,即:該數(shù)字同步表設(shè)計(jì)能夠?qū)崿F(xiàn)并車過程中對(duì)頻差的實(shí)時(shí)監(jiān)測(cè),同時(shí)能夠完成對(duì)頻差方向和合閘信號(hào)的鑒別,誤差精度完全符合要求。同步表示意圖如圖5所示,整體實(shí)驗(yàn)電路圖如圖6所示。

圖5 同步表示意圖
5 結(jié)論
本文設(shè)計(jì)思想新穎,運(yùn)用數(shù)模轉(zhuǎn)換技術(shù)將模擬信號(hào)變換成數(shù)字信號(hào)驅(qū)動(dòng)同步表,能夠有效抑制機(jī)艙中各種干擾模擬信號(hào)及其諧波的干擾。同時(shí)由于采用單片機(jī)控制,實(shí)時(shí)性強(qiáng),精度高,且預(yù)留豐富的I/O口,為以后的功能擴(kuò)展提供了硬件基礎(chǔ)的保障。
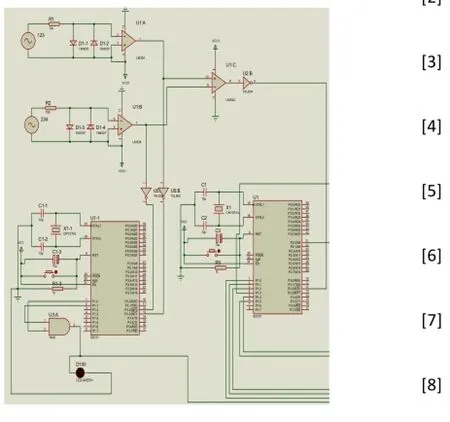
圖6 實(shí)驗(yàn)電路圖
[1] 肖看, 李群芳. 單片機(jī)原理、接口及應(yīng)用:嵌入式系統(tǒng)技術(shù)基礎(chǔ)[M]. 北京: 清華大學(xué)出版社, 2010.
[2] 吳志良. 船舶電站[M]. 大連: 大連海事大學(xué)出版社,2012.
[3] 戴文進(jìn)等. 電機(jī)學(xué)[M]. 北京: 清華大學(xué)出版社,2008.
[4] 康華光, 陳大欽, 張林. 電子技術(shù)基礎(chǔ)北京(模擬部分)[M]. 北京: 高等教育出版社, 2006.
[5] 夏永明等, 船用智能同步表檢測(cè)、指示控制儀表[J].上海海事大學(xué)學(xué)報(bào), 2010, 31(4)41-44.
[6] 夏永明.智能化多功能數(shù)字式整步表. 31[P]cn200962527.上海海事大學(xué)學(xué)報(bào), 2007-10-17.
[7] 孫仁勇等. 用單片機(jī)實(shí)現(xiàn)輪機(jī)模擬器電站仿真同步表[J]. 大連海事大學(xué)學(xué)報(bào), 2002, 28(4): 9-12.
[8] 康華光, 陳大欽, 張林. 電子技術(shù)基礎(chǔ)(數(shù)字部分)[M]. 北京: 高等教育出版社, 2009.
[9] 張小兵等. C/C++程序設(shè)計(jì).[M].北京:中國鐵道出版社,2007.
[10] 陳海宴. 51單片機(jī)原理及其應(yīng)用: 基于 Keil C與Proteus[M]. 北京: 北京航空航天大學(xué)出版社, 2010.
The Design of a Digital Dual MCUs Synchronoscope
Xu Gongde,Wu Zhiliang
(Marine Engineering College,Dalian Maritime University,Dalian 116026,Liaoning,China)
According to the requirements and characteristics of automatic control of ship’s power station,the new high-precision digital synchronoscope is designed. Using Proteus and Keil as experimental platform,the corresponding design of software programming and peripheral hardware circuits are completed,and the realization of main technology is analyzed. Simulation results show that the design of new digital synchronization table makes sure that the frequency difference and phase difference of generators and grid voltage can be detected during generator connecting in parallel with system,and it operates reliably with high precision.
marine power station; synchronoscope; phase detection; frequency difference; MCU;
U665 TP36
A
1003-4862(2015)12-0061-04
2015-09-11
國家自然科學(xué)基金重大項(xiàng)目(51490681)、國家重點(diǎn)基礎(chǔ)研究發(fā)展計(jì)劃(973計(jì)劃)(2015CB251004)
徐恭德(1992-),男,在讀碩士研究生。研究方向:船舶電力系統(tǒng)。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電力工程技術(shù)(2014年1期)2014-03-20 14:19:06