永磁同步電機(jī)傳動(dòng)系統(tǒng)的非線性控制策略及其調(diào)速系統(tǒng)的實(shí)現(xiàn)
2015-10-24 08:13:35李凌杰敬一立
船電技術(shù) 2015年12期
李凌杰,敬一立
(武漢船用電力推進(jìn)裝置研究所,武漢 430064)
永磁同步電機(jī)傳動(dòng)系統(tǒng)的非線性控制策略及其調(diào)速系統(tǒng)的實(shí)現(xiàn)
李凌杰,敬一立
(武漢船用電力推進(jìn)裝置研究所,武漢 430064)
介紹了永磁同步電機(jī)傳動(dòng)系統(tǒng)調(diào)速系統(tǒng)控制。首先簡(jiǎn)單分析了非線性控制策略,進(jìn)而分析了電流返回解耦方式和SVPWM原理,設(shè)計(jì)雙閉環(huán)控制器,介紹系統(tǒng)軟硬件設(shè)計(jì)。實(shí)驗(yàn)結(jié)果證實(shí)控制器設(shè)計(jì)的正確,空載條件下,穩(wěn)態(tài)時(shí)速度波動(dòng)幅度不超過2 rpm,穩(wěn)定性良好;速度給定10 rpm時(shí),穩(wěn)態(tài)誤差為1 rpm,系統(tǒng)低速運(yùn)行效果良好。證明了電流返回解耦方式和SVPWM原理線性控制策略具有很好的動(dòng)態(tài)性能和穩(wěn)定性。
永磁同步電機(jī)傳動(dòng)系統(tǒng)調(diào)速系統(tǒng)非線性控制
0 引言
永磁同步電機(jī)控制系統(tǒng)包括速度和位置兩部分,傳動(dòng)系統(tǒng)一般代表速度控制系統(tǒng),近幾年來,隨著電力電子技術(shù)的不斷發(fā)展,交流控制系統(tǒng)得到廣泛使用,精度和可靠性都有了很大的提高,永磁同步電機(jī)控制系統(tǒng)在多種領(lǐng)域受到廣泛使用,對(duì)于永磁同步電機(jī)控制系統(tǒng)而言,單一非線性方法僅僅針對(duì)某一問題,本文主要分析永磁同步電機(jī)傳動(dòng)系統(tǒng)的幾類非線性控制策略和調(diào)速系統(tǒng)的實(shí)現(xiàn)。
1 調(diào)速系統(tǒng)性能要求
電氣傳動(dòng)在發(fā)展中廣泛應(yīng)用于工業(yè)領(lǐng)域中,20世紀(jì)60年代以后,交流調(diào)速系統(tǒng)開始得到廣泛使用,交流電動(dòng)機(jī)沒有換向機(jī)構(gòu),結(jié)構(gòu)簡(jiǎn)單、運(yùn)行安全可靠,而且具有寬調(diào)速范圍、快速動(dòng)態(tài)響應(yīng)性能,能夠?qū)崿F(xiàn)產(chǎn)品系列化。交流調(diào)速包括同步電動(dòng)機(jī)調(diào)速和異步電動(dòng)機(jī)調(diào)速,永久磁鐵勵(lì)磁同步電動(dòng)機(jī)屬于同步電動(dòng)類型,采用稀土材料,大大降低電動(dòng)機(jī)體積和重量,維護(hù)方面,一般動(dòng)率小于10 kW,性能超過了直流伺服裝置,能夠消除轉(zhuǎn)子損耗,但是保持恒功率調(diào)速比較困難。
交流調(diào)速系統(tǒng)朝著綠色化、網(wǎng)絡(luò)化發(fā)展,交流調(diào)速系統(tǒng)數(shù)字化克服了電路功能單一性、控制精度不高等特點(diǎn),控制靈活性更高。調(diào)速系統(tǒng)智能化更是發(fā)展的非常快,除了常規(guī)PID控制外,高性能智能控制器能夠?qū)崿F(xiàn)調(diào)速系統(tǒng)參數(shù)自檢測(cè)。網(wǎng)絡(luò)化發(fā)展能夠同時(shí)保持與上位機(jī)的聯(lián)系,設(shè)備控制和通訊更加方便,能夠進(jìn)一步完善工業(yè)控制。交流調(diào)速系統(tǒng)綠色化便于各種PWM控制,能夠降低濾波電抗、電容,減少對(duì)電網(wǎng)的傷害。調(diào)速系統(tǒng)性能在設(shè)計(jì)中要求高精度、快響應(yīng)、寬調(diào)速范圍。在速度控制中,要求調(diào)度精度高,盡可能減少靜態(tài)和動(dòng)態(tài)速降,要求跟蹤信號(hào)指令信號(hào)相應(yīng)快。除了滿足這幾點(diǎn)要求之外,電動(dòng)機(jī)調(diào)速系統(tǒng)要求能夠在整個(gè)轉(zhuǎn)速中平滑運(yùn)轉(zhuǎn),盡可能減少轉(zhuǎn)矩波動(dòng),滿足低速大轉(zhuǎn)矩的要求,電動(dòng)機(jī)要求盡可能減少轉(zhuǎn)動(dòng)慣量,保證電動(dòng)機(jī)能夠承受頻繁的啟動(dòng)和反轉(zhuǎn)等動(dòng)作。
2 永磁同步電機(jī)傳動(dòng)系統(tǒng)非線性控制策略
永磁同步電機(jī)傳動(dòng)系統(tǒng)控制包括矢量控制、直接轉(zhuǎn)矩控制、先進(jìn)控制等。矢量控制是在1971年提出的一種理論,交流電機(jī)運(yùn)行性能得到很大的提高,模仿電機(jī)控制方式,以轉(zhuǎn)子磁鏈作為參考坐標(biāo),將電子電流分解為兩個(gè)分量,然后分別對(duì)其進(jìn)行獨(dú)立控制。采用質(zhì)量控制系統(tǒng)具有良好的轉(zhuǎn)矩效應(yīng),可實(shí)現(xiàn)全負(fù)載運(yùn)行,但是在實(shí)際運(yùn)用中發(fā)現(xiàn)想要進(jìn)行坐標(biāo)變換,運(yùn)算量過大,對(duì)電機(jī)參數(shù)依賴性很大,控制效果不佳。
直接轉(zhuǎn)矩控制策略是繼矢量控制后提出的一種理論,摒棄了矢量控制的解耦思想,強(qiáng)調(diào)直接控制電機(jī)轉(zhuǎn)矩,因此該理論忽略了矢量轉(zhuǎn)換等計(jì)算,采用定子磁鏈定向方式,直接控制電機(jī)磁鏈和轉(zhuǎn)矩,這種控制策略簡(jiǎn)單明了,方法簡(jiǎn)單,但是會(huì)出現(xiàn)轉(zhuǎn)矩脈動(dòng)問題。
先進(jìn)控制策略是近些年不斷使用的控制理論,包括自適應(yīng)、滑膜變結(jié)構(gòu)控制、自抗擾控制等。自適應(yīng)控制技術(shù)是在確定模型下修改系統(tǒng)運(yùn)行程序以達(dá)到控制對(duì)象和條件的理論,在測(cè)量信號(hào)基礎(chǔ)上,在線估計(jì)不穩(wěn)定被控對(duì)象,并輸入?yún)?shù)估計(jì)值,當(dāng)前所采用的自適應(yīng)控制模型,多是這種理論。此方式能夠保值電機(jī)良好性能,但是計(jì)算量較大。滑膜變結(jié)構(gòu)控制采用的是開關(guān)控制方法,控制不具有連續(xù)性,能夠根據(jù)調(diào)量的偏差控制系統(tǒng)運(yùn)行,滑動(dòng)模型可以設(shè)計(jì),與參數(shù)無關(guān),這種控制理論容易實(shí)現(xiàn),但是存在抖振問題。無源控制從能量角度出發(fā),配置系統(tǒng)能量消耗特性舞動(dòng)分量,不會(huì)影響系統(tǒng)無功力穩(wěn)定性,這是一種比較穩(wěn)定的控制方法,但是存在很多不確定性,適應(yīng)性不強(qiáng),抗負(fù)載能力也不高。自抗擾控制能夠自行檢測(cè)并補(bǔ)償內(nèi)外擾動(dòng),計(jì)算量小,但是可調(diào)參數(shù)比較高,不容易實(shí)現(xiàn)。逆系統(tǒng)控制是近幾年提出的一種理論,設(shè)計(jì)理論比較完善,避免了對(duì)微分幾何理論的引入,但是系統(tǒng)參數(shù)隨工況變化較大。反步控制是一種比較新穎的控制策略,在設(shè)計(jì)中需要保證虛擬誤差方程指數(shù)收斂為零,算法簡(jiǎn)單,能夠保證系統(tǒng)穩(wěn)定性,但是計(jì)算量很大,需要花費(fèi)較長(zhǎng)調(diào)整時(shí)間。
3 永磁同步電機(jī)無速度傳感器控制技術(shù)
永磁同步電機(jī)控制系統(tǒng)中,在轉(zhuǎn)子軸上需要安裝傳感器,但是會(huì)增加轉(zhuǎn)子軸轉(zhuǎn)動(dòng)慣量,系統(tǒng)可靠性大大降低,應(yīng)用場(chǎng)合也受到控制,因此無速度傳感器是為滿足這點(diǎn)而出現(xiàn)的,根據(jù)無傳感器 PMSM轉(zhuǎn)子位置自檢測(cè)方法在不同速度之間的結(jié)果,一般使用在中高速方法和低速方法中。中高速控制方法動(dòng)態(tài)性能良好,但是對(duì)基波依賴性很高,低速控制方法利用電機(jī)凸級(jí)性實(shí)現(xiàn)轉(zhuǎn)子位置的跟蹤。
適合于中高速無速度傳感器的技術(shù)主要為磁鏈估計(jì)法,這種方法計(jì)算量少,簡(jiǎn)單操作易實(shí)現(xiàn),對(duì)電動(dòng)機(jī)參數(shù)依賴性較大。適用于低速的方法是利用電機(jī)凸級(jí)效應(yīng)檢測(cè)轉(zhuǎn)子磁位,如高頻電壓信號(hào)注入法,利用轉(zhuǎn)子凸級(jí)性,提出轉(zhuǎn)子的位置,無檢測(cè)滯后,但是需要注意高頻信號(hào)幅度大,干擾基波電量。
4 系統(tǒng)控制器設(shè)計(jì)
永磁同步電動(dòng)機(jī)等效為雙閉環(huán)坐標(biāo)直流電機(jī),整個(gè)PMSM調(diào)速系統(tǒng)與雙閉環(huán)形式直流調(diào)速相似性很高,采用的理論模型為自適應(yīng)理論模型的一種,在不改變環(huán)境情況下,給定性能指標(biāo)變?yōu)閰⒖夹阅苤笜?biāo),模型自適應(yīng)速度很高。雙閉環(huán)控制結(jié)構(gòu)件圖1所示,包括電流控制器、電流反饋和矢量控制算法三部分,電流反饋通過電流采樣電路進(jìn)行坐標(biāo)變換得到電流反饋量,輸出電流與反饋電量相同。速度環(huán)由速度控制器、速度反饋等組成,在反饋環(huán)節(jié)中,需要經(jīng)過速度計(jì)算環(huán)節(jié)得到當(dāng)前轉(zhuǎn)速。


在推導(dǎo)四度控制器中,速度環(huán)截止頻率需要保持在電流環(huán)頻率的1/8左右,因此電流環(huán)環(huán)節(jié)可以看做為慣性環(huán)節(jié),在不考慮負(fù)載轉(zhuǎn)矩和阻尼情況下等效為一階慣性環(huán)節(jié),由于Tcf遠(yuǎn)遠(yuǎn)小于時(shí)間常數(shù),可以進(jìn)一步簡(jiǎn)化速度環(huán)框圖,經(jīng)過PI串聯(lián)校正后,速度環(huán)為典型II型系統(tǒng),根據(jù)電機(jī)和控制參數(shù)得到 Kps=0.76,在不考慮阻尼影響下,性能良好,只改變轉(zhuǎn)動(dòng)慣量,就能夠得到很好的控制效果。
5 系統(tǒng)軟硬件設(shè)計(jì)和實(shí)驗(yàn)
系統(tǒng)硬件設(shè)計(jì)包括功率板和控制板,功率板包括開關(guān)電源、系統(tǒng)主電路以及保護(hù)檢測(cè)電路等,開關(guān)電源包括九路輸出,包括為控制板提供供電電源,供給驅(qū)動(dòng)芯片采用3210,供給功率板運(yùn)算放大電路等。
系統(tǒng)主電路為電壓型逆變器形式,包括工頻電流轉(zhuǎn)換、濾波回路以及逆變器等,主電路結(jié)構(gòu)件圖3所示,圖中R1是指軟啟動(dòng)電阻,主要是避免瞬間電流過大,控制電路有規(guī)則地控制逆變器開關(guān)管的導(dǎo)通,驅(qū)動(dòng)電動(dòng)機(jī)運(yùn)行。

電流檢測(cè)電路包括電平轉(zhuǎn)換電路和霍爾元件,其中霍爾元件量程為-12 A~+12 A,DSP采樣量程為 0~3.3 V,因此需要在霍爾元件加入電平轉(zhuǎn)換環(huán)節(jié),起到緩沖、隔離以及提高等作用。在DSP采樣處理中,減去偏置值,得到采樣信號(hào)值,系統(tǒng)初始化時(shí),未運(yùn)行電流采樣值為準(zhǔn)則。采樣程度中將采樣值經(jīng)過軟件濾波完成電流采樣環(huán)節(jié)。
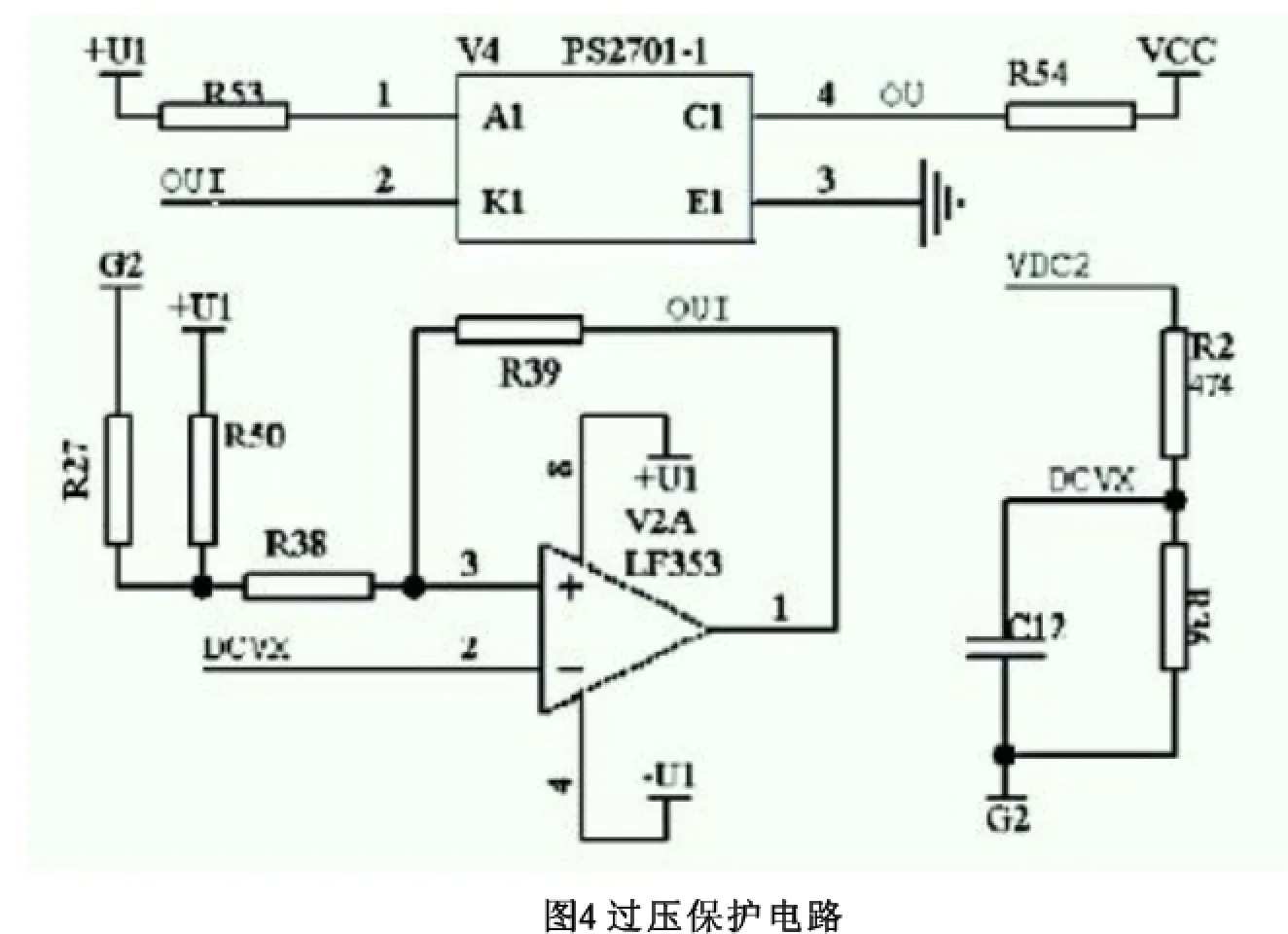
在計(jì)算中采用電壓矢量控制算法,在過壓和欠壓保護(hù)中需要監(jiān)測(cè)母線電壓值,母線電壓由電平轉(zhuǎn)換電路和分壓電路構(gòu)成,母線電壓經(jīng)過 RC濾波之后,信號(hào)引入放大器,將信號(hào)接入采樣通道中,需要注意電壓控制在DSP和AD量程中,避免損壞DSP。在軟件處理中,為避免影響系統(tǒng)穩(wěn)定性,母線電壓不能改變過頻。過流保護(hù)電路由電壓比較器構(gòu)成,正向電流過流值采用 HOC基準(zhǔn),負(fù)向電流采用LOC電壓基準(zhǔn),超過電壓基準(zhǔn)值會(huì)輸出過流信號(hào),在系統(tǒng)過流時(shí),過流比較器輸出低。過壓保護(hù)器主要由電壓比較器組成,保護(hù)電路見圖4所示,采用母線電壓采樣值作為基準(zhǔn)電壓,大于基準(zhǔn)電壓,輸出過壓信號(hào)。
控制器設(shè)計(jì)包括控制面板、DSP最小系統(tǒng)以及接口電路等,控制面板為最基本人機(jī)界面,發(fā)出的顯示數(shù)據(jù)為串行數(shù)據(jù),在盡可能減少外部電路條件,形成正常系統(tǒng)。在調(diào)試程序中,將程序安裝在RAM中,實(shí)現(xiàn)單步調(diào)試,由于RAM資源有限,外部擴(kuò)展4片RAM。碼盤信號(hào)采用差分信號(hào)輸入,抗干擾能力強(qiáng),采用 26LS32芯片轉(zhuǎn)換差分信號(hào)。
系統(tǒng)軟件設(shè)計(jì)中,系統(tǒng)主控制芯片為TMS320LF2407A,基于DSP調(diào)速系統(tǒng)設(shè)計(jì)中,對(duì)速度要求很高,系統(tǒng)受控狀態(tài)量變化很大,在軟件設(shè)計(jì)中,需要充分利用DSP資源。主程序完整功能包括DSP式中、事件管理器、A/D等模塊等,主程序模塊流程為開始→禁止看門狗→設(shè)置時(shí)鐘→設(shè)置 I/O口→設(shè)置事件管理器→設(shè)置AD→變量初始化→轉(zhuǎn)子初始位置檢測(cè)→中斷。中斷程度是系統(tǒng)出現(xiàn)過電壓和過電流情況下發(fā)出的中斷。由于TI公司DSP僅僅支持定點(diǎn)運(yùn)算,為保證控制精度還需要用到浮點(diǎn)計(jì)算,采用各個(gè)變量標(biāo)么值數(shù)學(xué)表述形式。系統(tǒng)在額定狀態(tài)下,各變量標(biāo)么值取1,啟動(dòng)時(shí),標(biāo)么值大于1,因此每一個(gè)變量采用16位表示。模擬量檢測(cè)是永磁同步三相定子電流檢測(cè),電機(jī)電流為零時(shí),電壓取1.65 V,AD轉(zhuǎn)換值取512,采用軟件方法很容易得到實(shí)際轉(zhuǎn)換結(jié)果。
在實(shí)驗(yàn)中,每個(gè)電流環(huán)周期均進(jìn)行4次采樣,在理論值上減去2048,由于實(shí)際上零點(diǎn)偏移,偏置值并不是2048,因此需要采用多次采樣值,取平均值,得到U相電流偏置值為1909,W相為1792。速度環(huán)實(shí)驗(yàn)中,速度取 600 rpm,在空載條件下,穩(wěn)態(tài)時(shí)速度波動(dòng)幅度不超過2 rpm,穩(wěn)定性良好,速度給定 10 rpm時(shí),穩(wěn)態(tài)誤差為 1 rpm,系統(tǒng)低速運(yùn)行效果良好。高速運(yùn)行時(shí),速度環(huán)取2000 rpm試驗(yàn),誤差不超過6 rpm,高速運(yùn)行效果良好。
6 結(jié)語
綜上所述,本文在分析永磁同步電機(jī)傳動(dòng)系統(tǒng)非線性控制策略基礎(chǔ)上,分析了調(diào)速系統(tǒng)的設(shè)計(jì),根據(jù)直流電機(jī)雙閉環(huán)調(diào)速系統(tǒng)工程設(shè)計(jì)雙閉環(huán)控制器,推導(dǎo)自適應(yīng)轉(zhuǎn)動(dòng)慣量辨別算法,并通過實(shí)驗(yàn)驗(yàn)證控制器設(shè)計(jì)的有效性,由于時(shí)間的限制,硬件平臺(tái)抗干擾軟硬件還需要進(jìn)一步改進(jìn),保證速度環(huán)運(yùn)行的穩(wěn)定性。
[1] 侯利民. 永磁同步電機(jī)傳動(dòng)系統(tǒng)的幾類非線性控制策略研究及其調(diào)速系統(tǒng)的實(shí)現(xiàn)[D]. 東北大學(xué),2010.
[2] 田書欣,楊喜軍,劉占軍,等. 地板水暖矢量控制調(diào)速系統(tǒng)轉(zhuǎn)子位置滑模觀測(cè)器的研究[J]. 電機(jī)與控制應(yīng)用,2011,38(1): 25-28.
[3] 侯利民,王巍. 無速度傳感器的表面式永磁同步電機(jī)無源控制策略[J]. 控制與決策,2013,(10): 1578-1582,1586.
[4] Sato D,Itoh J I. Improvement of the electric energy consumption of permanent magnet synchronous motor drive system using three-level inverter[J]. Ieej Transactions on Sensors & Micromachines,2015,5: 135.
[5] Gong Xianwu,MA Jian,Xu Shufen,et al. High efficiency and fast response control of permanent magnet synchronous motor for electric vehicles[J]. China Journal of Highways&stransport,2014,27: 171-170.
[6] 唐聞新. 基于模糊控制的永磁同步電機(jī)速度控制系統(tǒng)設(shè)計(jì)[D]. 合肥工業(yè)大學(xué),2011.
[7] 周鋒. 基于矩陣變換器的永磁同步電機(jī)無速度傳感器調(diào)速系統(tǒng)研究[D]. 中南大學(xué),2012.
[8] 周野. 基于雙向DC/DC變換器的無刷直流電機(jī)轉(zhuǎn)矩脈動(dòng)抑制研究[D]. 西南交通大學(xué),2011.
Nonlinear Control Strategy and Realization of the Speed Control System for Permanent Magnet Synchronous Motors Drive System
Li Lingjie,Jing Yili
(Wuhan Institute of Marine Electric Propulsion,Wuhan 430064,China)
The speed control system of drive system for the permanent magnet synchronous motor is introduced. The nonlinear control strategy,the current return decoupled manner and SVPWM principle are analyzed. The dual closed-loop controller is designed and the system hardware and software is described. Experimental results demonstrate the correct of the controller design. What is,in no-load conditions,the fluctuation range is no more than 2rpm in the steady state and has good stability. When a 10rpm speed is given,the steady-state error is 1rpm and the system works well at low speed. The results prove that the current return decoupled manner and SVPWM principle of the linear control strategy has a good dynamic performance and stability
permanent magnet synchronous motor; the transmission system; speed control system; nonlinear control
TM351
A
1003-4862(2015)12-0072-05
2015-09-30
李凌杰(1983-),男,工程師,研究方向:電氣工程。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26