內(nèi)嵌式永磁同步電動機弱磁控制分段線性化研究
2015-10-25 05:52:15陳坤華孫玉坤吉敬華項倩雯
電工技術(shù)學(xué)報 2015年24期
陳坤華 孫玉坤 吉敬華 項倩雯
(江蘇大學(xué)電氣信息工程學(xué)院 鎮(zhèn)江 212013)
內(nèi)嵌式永磁同步電動機弱磁控制分段線性化研究
陳坤華孫玉坤吉敬華項倩雯
(江蘇大學(xué)電氣信息工程學(xué)院鎮(zhèn)江212013)
在對內(nèi)嵌式永磁同步電動機數(shù)學(xué)模型進行分析的基礎(chǔ)上,詳細研究了弱磁控制過程,提出了分段線性化的弱磁控制策略。根據(jù)電動機弱磁各階段運行的特點,將弱磁控制分為三個區(qū)域,對每個區(qū)域分別線性化,得到了各區(qū)域工作點的直軸、交軸電流和控制方程。線性化后的弱磁控制策略節(jié)省了電動機工作點計算時間,提高了系統(tǒng)實時性能,可實現(xiàn)最大轉(zhuǎn)矩輸出。結(jié)果表明,分段線性化弱磁控制策略使內(nèi)嵌式永磁同步電動機在寬調(diào)速范圍內(nèi)獲得了更好的調(diào)速性能,電動機可控性和可靠性增強。
內(nèi)嵌式永磁同步電動機弱磁控制分段線性化調(diào)速數(shù)學(xué)模型
0 引言
內(nèi)嵌式永磁同步電動機(Interior Permanent Magnet Synchronous Motors, IPMSM)具有功率密度大、機械強度高和氣隙磁路小等特點,且適于高速運行。該類電動機可利用磁阻轉(zhuǎn)矩分量來改善調(diào)速性能、提高電動機效率,在電動汽車[1,2]等要求較高的調(diào)速驅(qū)動系統(tǒng)中得到了廣泛應(yīng)用。內(nèi)嵌式永磁同步電動機有永磁體勵磁,須采用弱磁控制,以滿足寬范圍調(diào)速要求,在低速時能實現(xiàn)恒轉(zhuǎn)矩輸出,高速時能恒功率輸出,在逆變器容量不變的情況下能提高系統(tǒng)性能。因此對內(nèi)嵌式永磁同步電動機進行弱磁控制以拓寬調(diào)速范圍有著重要意義。
永磁同步電動機弱磁控制方法的研究始于20世紀80年代中期[3],于20世紀90年代初期形成了較完善的弱磁理論[4],并一直是研究的熱點[5,6]。國內(nèi)外在弱磁控制策略方面的研究有:電動機數(shù)學(xué)模型法[7],該方法完全依賴于數(shù)學(xué)模型,只具有理論意義;查表法[8],該方法需要大量實驗數(shù)據(jù),對數(shù)據(jù)表準確度要求比較高,閉環(huán)控制器的增益難以設(shè)置;改進的MTPA弱磁控制法[9],該方法具有高的轉(zhuǎn)矩輸出,但是不能進行寬范圍調(diào)速;單電流調(diào)節(jié)器法[10],該方法魯棒性好,但變轉(zhuǎn)速、轉(zhuǎn)矩時最優(yōu)直軸電壓較難選擇。另外還有電壓極限橢圓梯度下降法、電流參考值修正弱磁法[11]、最優(yōu)弱磁路徑控制法[12]、電壓反饋優(yōu)化弱磁控制法[13]和在線模糊邏輯控制器優(yōu)化控制法[14],這五種方法具有寬范圍調(diào)速能力,并對調(diào)速過程中電流、電壓或效率進行優(yōu)化,但為非線性控制策略,參數(shù)間存在相互耦合。
在對內(nèi)嵌式永磁同步電動機弱磁控制研究中,不難發(fā)現(xiàn)電動機轉(zhuǎn)矩-電流特性曲線和轉(zhuǎn)速-電流特性曲線均為非線性,對電動機實時控制時,電動機工作點直軸電流和交軸電流相互耦合,計算非常困難。特別是在弱磁控制時,會導(dǎo)致實際電流無法跟蹤給定電流,使電流調(diào)節(jié)器迅速飽和,電流失控。
本文在充分研究電動機數(shù)學(xué)模型基礎(chǔ)上,提出對電動機弱磁區(qū)間分段線性化的思想。分段線性化后,電動機工作點直軸電流和交軸電流實現(xiàn)解耦,大大縮短計算時間,過渡平滑,控制準確度高,響應(yīng)速度快,系統(tǒng)穩(wěn)定性提高。
1 電動機數(shù)學(xué)模型
內(nèi)嵌式永磁同步電動機直軸等效氣隙小,直軸電感一般小于交軸電感,可利用磁阻效應(yīng)改善調(diào)速特性,便于進行弱磁控制[15],且其抗失磁能力強、機械強度高,該類電動機調(diào)速范圍寬,效率高,適合高速恒功率驅(qū)動領(lǐng)域使用。
內(nèi)嵌式永磁同步電動機,電壓方程、磁鏈方程和轉(zhuǎn)矩方程分別為
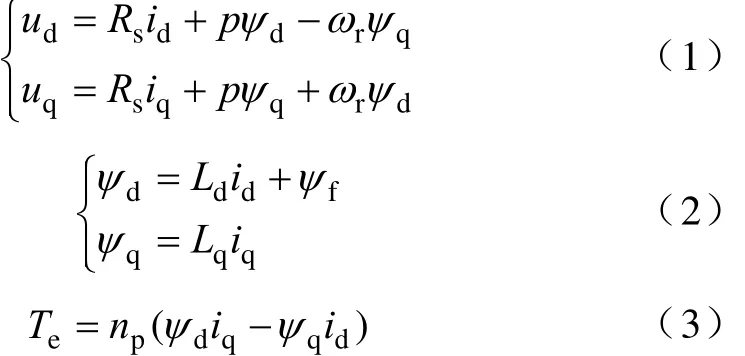
式中ud,uq——直軸、交軸電壓;
id,iq—— 直軸、交軸電流;
Ψd,Ψq——直軸、交軸磁鏈;
Ld,Lq——直軸、交軸電感;
Rs——等效同步電阻;
ωr——dq軸旋轉(zhuǎn)角頻率;
ψf——永磁磁鏈;
Te——電磁轉(zhuǎn)矩;
np——電動機轉(zhuǎn)子極對數(shù)。
p——微分算子。
2 弱磁區(qū)間線性化分析
圖1中虛線橢圓為不同轉(zhuǎn)速下的電壓極限橢圓,轉(zhuǎn)速越高,橢圓包含區(qū)域越小。實線圓為電流極限圓,電流極限圓以坐標原點為圓心。
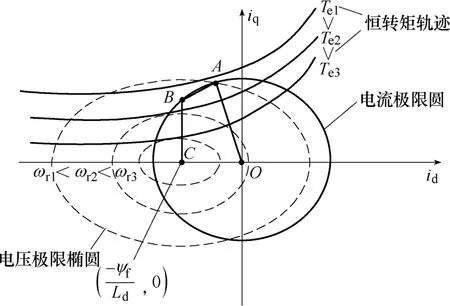
圖1 內(nèi)嵌式永磁同步電動機分段線性控制弱磁區(qū)域Fig.1 IPMSM piece-wise linearization control field-weakening area
電壓極限橢圓方程為

電流極限圓方程為

式中ulim——電壓極限值;
ilim——電流極限值。
對弱磁區(qū)間進行分段線性化,將其分為三段,設(shè)直軸電流、交軸電流坐標原點為O,最大轉(zhuǎn)矩、電流比曲線與電流極限圓交點為A,第一段為A點與O點構(gòu)成的直線,在OA段內(nèi)ωr≤ωr1。
A點的直軸電流、交軸電流值分別為

OA段直線的斜率為

OA段直線方程為

由A點直軸、交軸電流值和電壓極限橢圓方程(4)可得A點處ωr1為

以O(shè)A段直線作為第一區(qū)域弱磁控制路徑,保證電動機起動時能獲得最大轉(zhuǎn)矩,電動機帶負載穩(wěn)態(tài)工作點在OA段直線上,改善了電動機帶負載工作時,穩(wěn)態(tài)點轉(zhuǎn)矩曲線與電流曲線聯(lián)立帶來的穩(wěn)態(tài)工作點計算復(fù)雜的問題。
設(shè)電壓極限橢圓中心為C點,則C點的直軸、交軸電流分別值為

以C點作垂直于直軸電流的直線,設(shè)其與電流極限圓交點為B,第三段為B點和C點構(gòu)成的直線,在BC段內(nèi)ωr≥ωr2,該段保持直軸電流恒定不變,則BC段直線方程為
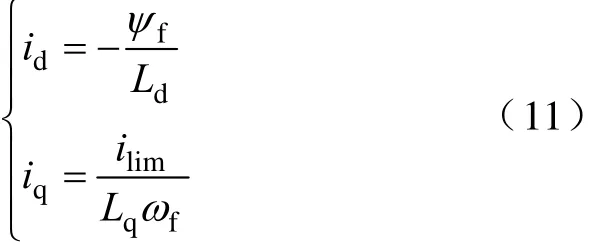
由式(11)可以看出,由于將直軸電流恒定為C點的直軸電流值,BC段交軸電流和電動機速度之間為一一對應(yīng)關(guān)系,很容易求取其穩(wěn)態(tài)工作點。
B點在電流極限圓上,可得B點直軸、交軸電流值分別為
B點處ωr2值為

第二段為AB段,ωr1<ωr<ωr2,A點和B點的直軸、交軸電流見式(6)、式(12),易得AB段的斜率為

式中idA, iqA——A點的直軸、交軸電流;
idB, iqB——B點的直軸、交軸電流。
設(shè)AB段直線方程為

該方程過A點和B點,可得

所以AB段直線方程為

AB段線性區(qū)域工作電流不在電流極限圓上,對工作電流有了很好的保護,有效防止電流超限。
線性化后三段弱磁控制路徑,保持了電動機的最大起動轉(zhuǎn)矩,解決了直軸、交軸電流相互耦合造成的電動機工作點計算困難,深度弱磁時導(dǎo)致的實際電流無法跟蹤給定電流,使電流失控的問題。線性控制模型簡單,實現(xiàn)了復(fù)雜弱磁模型間直軸、交軸電流的解耦,工作點易于求取。
3 系統(tǒng)仿真
對內(nèi)嵌式永磁同步電動機分段弱磁控制進行了系統(tǒng)仿真。弱磁控制模塊內(nèi)部結(jié)構(gòu)如圖2所示,根據(jù)目標轉(zhuǎn)速,當轉(zhuǎn)速ωr≤ωr1時,選擇線性弱磁1區(qū),工作路徑為圖1中OA段;當轉(zhuǎn)速ωr1<ωr<ωr2時,選擇線性弱磁2區(qū),工作路徑為圖1中AB段;當轉(zhuǎn)速ωr≥ωr2時,選擇線性弱磁3區(qū),工作路徑為圖中BC段。弱磁控制模塊輸出為直軸、交軸電流參考值。系統(tǒng)仿真其余部分跟常規(guī)弱磁方法相同。
仿真分三個階段,第一階段為0~0.2s,第二階段為0.2~0.4s,第三階段為0.4~0.6s。圖3為優(yōu)化后三個階段直軸、交軸電流曲線,第一階段電動機起動時交軸電流值較大,直軸電流值很小,穩(wěn)態(tài)時交、直軸電流值都很小。0.1s加負載后穩(wěn)態(tài)時交軸電流增加,直軸電流也增加。第二階段電動機速度增加,穩(wěn)態(tài)時交軸電流較第一階段減小,直軸電流值較第一階段增加很大。第三階段電動機速度進一步增加,到穩(wěn)態(tài)時交軸、直軸電流都有所減小。
圖4為優(yōu)化后三個階段轉(zhuǎn)矩波形。可以看出第一階空載時轉(zhuǎn)矩值很小,當負載增加時,轉(zhuǎn)矩值增加。第二階段電動機速度增加,但穩(wěn)態(tài)時帶負載能力有所減弱。第三階段電動機速度進一步增加,帶負載能力進一步減弱。

圖2 弱磁控制模塊內(nèi)部結(jié)構(gòu)Fig.2 Internal structure of field weakening control module
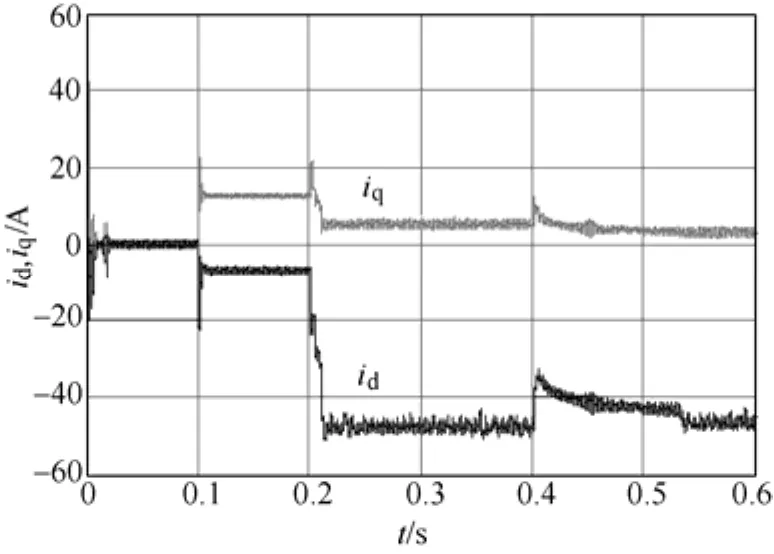
圖3 三個階段直軸、交軸電流曲線Fig.3 Three stages d-axis and q-axis current curves
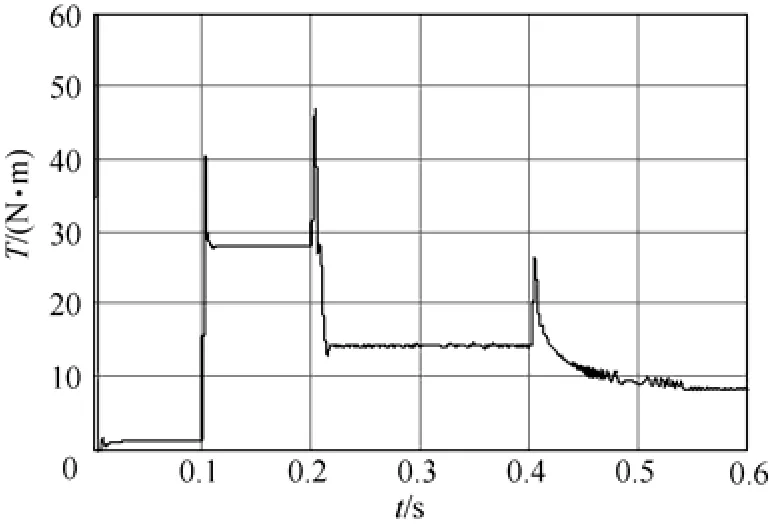
圖4 三個階段轉(zhuǎn)矩曲線Fig.4 Three stages torque curve
4 實驗分析
系統(tǒng)實驗平臺整體結(jié)構(gòu)如圖5所示。主要包括內(nèi)嵌式永磁同步電動機、電動機控制部分和實驗操作臺。
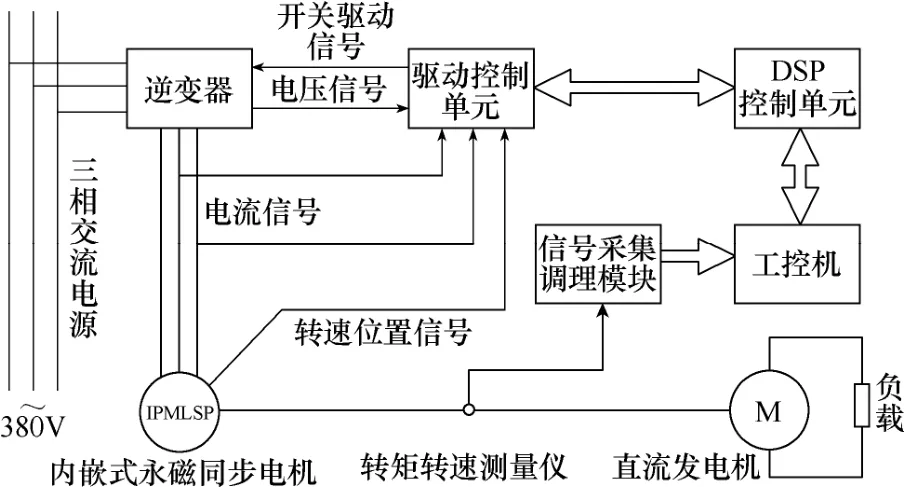
圖5 內(nèi)嵌式永磁同步電動機實驗平臺Fig.5 IPMSM experimental platform
電動機額定功率5kW,轉(zhuǎn)子4對極,額定轉(zhuǎn)速2 000r/min,直軸電感6.5mH,交軸電感8.5mH,直流母線電壓600V。
電動機控制部分包括逆變器、驅(qū)動控制單元和數(shù)字信號處理系統(tǒng)(以TMS320LF2812DSP為核心),根據(jù)目標轉(zhuǎn)速選擇弱磁區(qū)域,數(shù)字信號處理系統(tǒng)產(chǎn)生SVPWM驅(qū)動波形,經(jīng)驅(qū)動控制單元功率放大,驅(qū)動逆變器各開關(guān)管工作。
實驗操作臺包括轉(zhuǎn)矩轉(zhuǎn)速測量儀、信號采集調(diào)理模塊、工控機、直流發(fā)電動機和負載。轉(zhuǎn)矩轉(zhuǎn)速測量儀測量電動機工作的轉(zhuǎn)矩和轉(zhuǎn)速。信號采集調(diào)理模塊將轉(zhuǎn)速和轉(zhuǎn)矩測量值轉(zhuǎn)換至合適的電壓范圍,輸出給工控機。直流發(fā)電動機和負載作為內(nèi)嵌式永磁同步電動機負載。

圖6 弱磁區(qū)間1各工作點交軸、直軸電流Fig.6 Current of q-axis and d-axis working point in the first field-weakening area
圖6是線性化后和線性化前弱磁區(qū)間1中OA段各工作點交軸、直軸電流。O點處的直軸、交軸電流均為零,A點處直軸、交軸電流分別為-22A、40A。隨著OA段轉(zhuǎn)速的增加,線性化后工作點直軸電流絕對值較線性化前大,弱磁程度加深。隨轉(zhuǎn)速的增加,交軸電流值增大。
圖7是線性化后和線性化前弱磁區(qū)間2中AB段各工作點交軸、直軸電流。B點處的直軸、交軸電流分別為-52A、22A。隨著AB段轉(zhuǎn)速的增加,線性化后工作點直軸電流絕對值較線性化前減小,弱磁減弱,避免整段工作點都在電流極限圓上。隨著轉(zhuǎn)速的增加,交軸電流值減小。

圖7 弱磁區(qū)間2各工作點交軸、直軸電流Fig.7 Current of q-axis and d-axis working point in the second field-weakening area
圖8是線性化后和線性化前弱磁區(qū)間3中BC段各工作點交軸、直軸電流。C點處的直軸、交軸電流分別為-52A、0A。隨著BC段轉(zhuǎn)速的增加,線性化后工作點直軸電流為恒定值,絕對值小于線性化前直軸電流。隨著轉(zhuǎn)速的增加,交軸電流值減小。

圖8 弱磁區(qū)間3各工作點交軸、直軸電流Fig.8 Current of q-axis and d-axis working point in the third field-weakening area
圖9為三相工作電流波形,三相電流均為正弦波形,電動機空載起動時三相電流較大,到達穩(wěn)態(tài)時電流減小;突加負載后,電動機三相電流增大,穩(wěn)態(tài)時三相電流穩(wěn)定,電動機工作狀況良好。
圖10為轉(zhuǎn)速-轉(zhuǎn)矩變化關(guān)系,在線性弱磁區(qū)域1,電動機實際處于恒轉(zhuǎn)矩工作,線性化后電動機帶載能力有所減弱,但減弱程度不大,對恒轉(zhuǎn)矩帶載能力影響很小。線性弱磁區(qū)域2,電動機實際處于恒功率工作,電動機帶負載能力也有所減小。但在線性弱磁區(qū)域3,電動機帶載能力增加。可以看出線性化弱磁控制策略對電動機整體的帶負載能力影響不大。
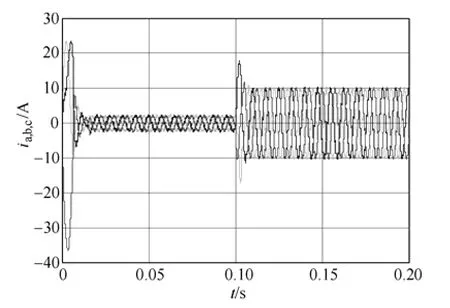
圖9 三相工作電流波形Fig.9 Three phase working current waveforms

圖10 轉(zhuǎn)速-轉(zhuǎn)矩變化關(guān)系Fig.10 Relationship between torque and speed
圖11為轉(zhuǎn)速波形,從圖中可以看出在線性弱磁區(qū)間1和線性弱磁區(qū)間2速度上升很快,到達穩(wěn)態(tài)后速度超調(diào)小,但線性弱磁區(qū)間3速度上升較慢,這與在線性弱磁區(qū)間3的電磁轉(zhuǎn)矩較小有關(guān)。弱磁區(qū)間1帶負載時,電動機在很短時間能到達穩(wěn)定工作點,說明在線性弱磁1區(qū),電動機能提供最大轉(zhuǎn)矩,該線性化弱磁控制器有較強的跟蹤給定能力、帶負載能力和動態(tài)穩(wěn)定性。

圖11 內(nèi)嵌式永磁同步電動機轉(zhuǎn)速波形Fig.11 IPMSM speed waveform
5 結(jié)論
本文在詳細研究內(nèi)嵌式永磁同步電動機數(shù)學(xué)模型和弱磁控制基礎(chǔ)上,提出了內(nèi)嵌式永磁同步電動機分段線性化弱磁控制策略。實驗結(jié)果表明線性弱磁區(qū)間1電動機直軸電流絕對值增加,增強了電動機弱磁程度,帶載能力有所減小;線性弱磁區(qū)間2電動機直軸電流絕對值減小,帶載能力也有所減弱;線性弱磁區(qū)間3電動機直軸電流恒定,弱磁程度減弱,電動機帶載能力增加,整體對電動機帶載能力影響非常小。線性化后大大簡化電動機弱磁控制工作點計算,在三個線性弱磁區(qū)域過渡階段,轉(zhuǎn)速變化平滑,提高了電動機控制的動態(tài)性能,工作狀態(tài)穩(wěn)定,證實了該線性化弱磁控制策略的可行性。
[1] Chang Yuan Chih, Chan Jui Teng, Chen Jian Cheng, et al. Development of permanent magnet synchronous generator drive in electrical vehicle power system[C]. IEEE Vehicle Power and Propulsion Conference, 2012: 115-118.
[2] 韓建群, 鄭萍. 一種用于電動汽車的永磁同步電機直接轉(zhuǎn)矩控制的簡化方法[J]. 電工技術(shù)學(xué)報, 2009, 24(1): 76-80.
Han Jianqun, Zheng Ping. A simplified direct torque control method of PMSM applied in electric vehicle [J]. Transactions of China Electrotechnical Society, 2009, 24(1): 76-80.
[3] Jahns T M, Kliman G B, Neumann T W. Interior permanent-magnet synchronous motors for adjustablespeed drives[J]. IEEE Transactions on Industry Applications, 1986, 22(4): 738-747.
[4] Soong W L, Miller T J E. Theoretical limitations to the field-weakening performance of the five classes of brushless synchronous ac motor drive[C]. IEEE Sixth International Conference on Electrical Machines and Drives, 1993: 127-132.
[5] Rahman M A, Osheiba A M, Kurihara K, et al. Advances on single-phase line-start high efficiency interior permanent magnet motors[J]. IEEE Transactions on Industrial Electronics, 2012, 59(3): 1333-1345.
[6] Pellegrino G, Armando E, Guglielmi P. Direct flux vector control of IPM motor drives in the maximum torque per voltage speed range[J]. IEEE Transactions on Industrial Electronics, 2012, 59(10): 3780-3788.
[7] Pan C T, Sue S M. A linear maximum torque per ampere control for IPMSM drives over full-speed range[J]. IEEE Transactions on Energy Conversion, 2005, 20(2): 359-366.
[8] Lenke R U, De Doncker R W, Kwak M S, et al. Field weakening control of interior permanent magnet machine using improved current interpolation technique [C]. 37th IEEE Power Electronics Specialists Conference, 2006: 1-5.
[9] Abroshan M, Milimonfared J, Malekian K, et al. An optimal control for saturated interior permanent magnet linear synchronous motors incorporating field weakening[C]. 13th International Power Electronics and Motion Control Conference, 2008: 1117-1122.
[10] Xu Longya, Zhang Yuan, Guven M K. A new method to optimize q-axis voltage for deep flux weakening control of IPM machines based on single current regulator[C]. International Conference on Electrical Machines and System (ICEMS), Wuhan, China, 2008: 2750-2754.
[11] 盛義發(fā), 喻壽益, 桂衛(wèi)華, 等. 軌道車輛用永磁同步電機系統(tǒng)弱磁控制策略[J]. 中國電機工程學(xué)報, 2010, 30(9): 74-79.
Sheng Yifa, Yu Shouyi, Gui Weihua, et al. Field weakening operation control strategies of permanent magnet synchronous motor for railway vehicles[J]. Proceedings of the CSEE, 2010, 30(9): 74-79.
[12] 白玉成, 唐小琦, 吳功平. 內(nèi)置式永磁同步電機弱磁調(diào)速控制[J]. 電工技術(shù)學(xué)報, 2011, 26(9): 54-59.
Bai Yucheng, Tang Xiaoqi, Wu Gongping. Speed control of flux weakening on interior permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2011, 26(9): 54-59.
[13] Bolognani S, Calligaro S, Petrella R. Optimal voltage feed-back flux-weakening control of IPMSM[C]. IEEE 37th Annual Conference of the Industrial Electronics Society, 2011: 4170-4175.
[14] Uddin M N, Rebeiro R S. Online efficiency optimization of a fuzzy-logic-controller-based IPMSM drive[J]. IEEE Transactions on Industry Applications, 2011, 47(2): 1043-1050.
[15] 唐任遠, 李振標. 現(xiàn)代永磁電機理論與設(shè)計[M]. 北京: 機械工業(yè)出版社, 1997.
The Piece-Wise Linearization Research of Interior Permanent Magnet Synchronous Motors Field-Weakening Control
Chen KunhuaSun YukunJi JinghuaXiang Qianwen
(Jiangsu UniversityZhenjiang212013China)
Based on the analysis of interior permanent magnet synchronous motors (IPMSM) mathematical model, the process of field-weakening control is studied in detail. A piece-wise linearization field-weakening control strategy is proposed in this paper. According to the characteristic of field-weakening control at different stages, the field-weakening control is divided into three areas, and all of the three areas are linearized respectively. The d-axis and q-axis current of working points, and control equation of the three field-weakening areas are got respectively. The linearized field-weakening control strategy saves the computation time of working point, improves the real-time performance of the system, and can realize maximum torque output. The test results prove that the IPMSM has better speed performance in wide speed regulating range by the use of the piece-wise linearization field-weakening control strategy. And the IPMSM is more controllable and has higher reliability.
Interior permanent magnet synchronous motors, field-weakening control, piece-wise linearization, speed regulating, mathematical model
TM351
陳坤華男,1981年生,博士研究生,講師,研究方向為新能源汽車、特種電機設(shè)計及智能控制系統(tǒng)。
孫玉坤男,1958年生,教授,博士生導(dǎo)師,研究方向為電力系統(tǒng)、特種電機及其控制。
國家自然科學(xué)基金(51007031)和江蘇高校優(yōu)勢學(xué)科建設(shè)工程資助項目。
2013-12-12改稿日期 2014-02-12