等效道路線聲源位置優化研究?
2015-10-27 02:21:27蔣從雙1瑞1潔1
應用聲學 2015年3期
關鍵詞:方法
蔣從雙1,2? 吳 瑞1,2 楊 潔1,2
(1北京市勞動保護科學研究所 北京 100054)
(2國家環境保護城市噪聲與振動控制工程技術中心 北京 100054)
?研究報告?
等效道路線聲源位置優化研究?
蔣從雙1,2? 吳 瑞1,2楊 潔1,2
(1北京市勞動保護科學研究所北京100054)
(2國家環境保護城市噪聲與振動控制工程技術中心北京100054)
計算道路交通噪聲時,一般將每個車道等效為1個線聲源。有時,為了簡化計算,將道路等效為1個線聲源,等效線聲源位置為道路中軸;或等效為2個線聲源,等效線聲源位置為道路兩側中心線或兩側最外車道中心線。本文推導了不同等效方法下觀測點噪聲的計算公式,并探討了不同等效方法引起的誤差。研究結果表明,將道路等效為2個線聲源,等效線聲源位置為道路兩側中心線的簡化方法引起的誤差最小。
道路線聲源,等效線聲源位置,優化
1 引言
道路交通噪聲計算中常將道路看作線聲源,再按線聲源的特性來計算觀測點噪聲。一般情況下,道路均為雙向多車道,將每條車道看作一個線聲源計算觀測點噪聲無疑是最準確的。然而在實際計算中,將多車道道路看作多條線聲源進行計算需要占用較大的計算資源,而且也很難準確獲取每條車道上的交通流信息。這時,就需要對道路進行簡化處理,將道路等效為1個或2個線聲源,且等效線聲源處于不同位置。
在各國道路交通噪聲預測模型中,英國CRTN模型[1]認為等效道路線聲源位置位于路肩內3.5 m處;法國NMPB模型[2]將每條車道看作1個線聲源(如圖1(a)),可以根據精度需求將道路等效為1個線聲源,等效線聲源位置為道路中軸(如圖1(b))或將道路等效為2個線聲源,等效線聲源位置分別為道路兩側中心線(如圖1(c));日本ASJ模型[3]也將每條車道看作1個線聲源,為了簡化計算,可以將道路等效為2個線聲源,等效線聲源位置為道路兩側中心線。德國RLS90模型[4]認為等效道路線聲源位置位于道路兩側最外車道中心處(如圖1(d));環境影響評價技術導則-聲環境(HJ2.4-2009)[5]將每條車道看作1個線聲源,并未明確其簡化方法。
可以看出,各模型中等效道路線聲源位置不盡相同,本文將對不同等效道路線聲源位置的計算方法及其引起的誤差進行詳細地探討。
2 觀測點噪聲計算方法
假定有一條雙向4車道的道路,1條車道的寬度為2D(2D通常大小為3.25~3.75 m),不考慮道路中間綠化帶,則道路寬度為8D,車流量為N(為了簡化計算,假定所有車輛為單一車型),車輛均勻地行駛在不同車道上,每條車道上車輛平均行駛速度均為V,觀測點距離道路邊緣為L。分別計算下面4種情況下觀測點的噪聲大小:(1)將每條車道看作一個線聲源,分別計算4個線聲源對觀測點噪聲的影響,再疊加起來便可以得到整條道路的影響;(2)將道路等效為1個線聲源,等效線聲源位置為道路中軸,計算該條道路對觀測點噪聲的影響;(3)將道路等效為2個線聲源,等效線聲源位置分別為道路兩側中心線,計算該道路對觀測點噪聲的影響;(4)將道路等效為2個線聲源,等效線聲源位置分別為道路兩側最外側車道中心線,計算該道路對觀測點噪聲的影響。圖1給出了不同等效道路線聲源位置的示意圖。
假設:單車在r0處排放的噪聲為Lr0,單車排放的噪聲由于空氣吸收、地面效應等各項因素引起的衰減量為A。

圖1不同等效道路線聲源位置示意圖Fig.1 Sketch of the different equivalent positions of the road line-sources
(1)第一種方法
第1車道(最近的車道)對觀測點的噪聲貢獻量[5]為

3 不同等效道路線聲源位置的誤差分析
無疑,第一種方法計算的觀測點噪聲是最準確的,認為其他方法與第一種方法的差值即為該方法的誤差。

其實,將車輛劃分為不同車型進行計算,計算過程復雜些,但不同方法的誤差計算結果仍只取決于參數p。
對于雙向4車道的道路,運用不同方法引起的誤差如圖2所示。

圖2雙向4車道不同測點處不同計算方法引起的誤差Fig.2 Errors induced by different methods of two-way 4 lanes圖2 雙向4車道不同測點處不同計算方法引起的誤差Fig.2 Errors induced by different methods of two-way 4 lanes
3 不同等效道路線聲源位置的誤差分析
無疑,第一種方法計算的觀測點噪聲是最準確的,認為其他方法與第一種方法的差值即為該方法的誤差。
其實,將車輛劃分為不同車型進行計算,計算過程復雜些,但不同方法的誤差計算結果仍只取決于參數p。
對于雙向4車道的道路,運用不同方法引起的誤差如圖2所示。
圖2雙向4車道不同測點處不同計算方法引起的誤差Fig.2 Errors induced by different methods of two-way 4 lanes圖2 雙向4車道不同測點處不同計算方法引起的誤差Fig.2 Errors induced by different methods of two-way 4 lanes
可以看出,第二種方法和第三種方法的誤差恒為負值,第四種方法的誤差恒為正值;第三種方法的誤差最小,第二種方法的誤差最大;p值越小,不同方法的誤差均越大,但實際中,p值不可能無限小,比如HJ2.4-2009中關于觀測點噪聲的計算公式只適用于r>7.5 m,其中r為觀測點到車道中心線的距離。
下面對車道數更多的道路進一步分析,對于雙向6車道的道路,仍假設1條車道的寬度為2D,不考慮道路中間綠化帶,則道路寬度為12D,此時運用不同方法引起的誤差如圖3所示。
對于雙向8車道的道路,仍假設1條車道的寬度為2D,不考慮道路中間綠化帶,則道路寬度為16D,此時運用不同方法引起的誤差如圖4所示。
可以看出,對于雙向6車道和8車道的道路,不同方法的誤差規律與雙向4車道的道路相似。但對于雙向8車道的道路,第四種方法的誤差最大,這與雙向4車道的道路略有差別。
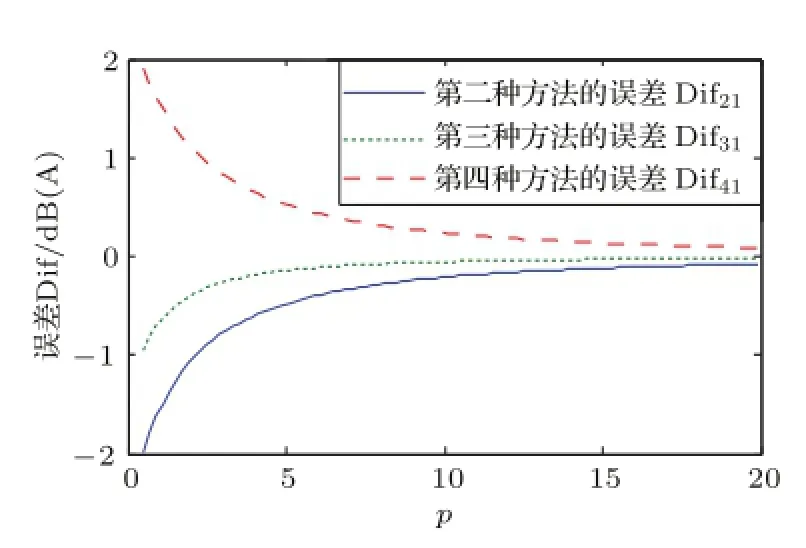
圖3 雙向6車道不同測點處不同計算方法引起的誤差Fig.3 Errors induced by different methods of two-way 6 lanes
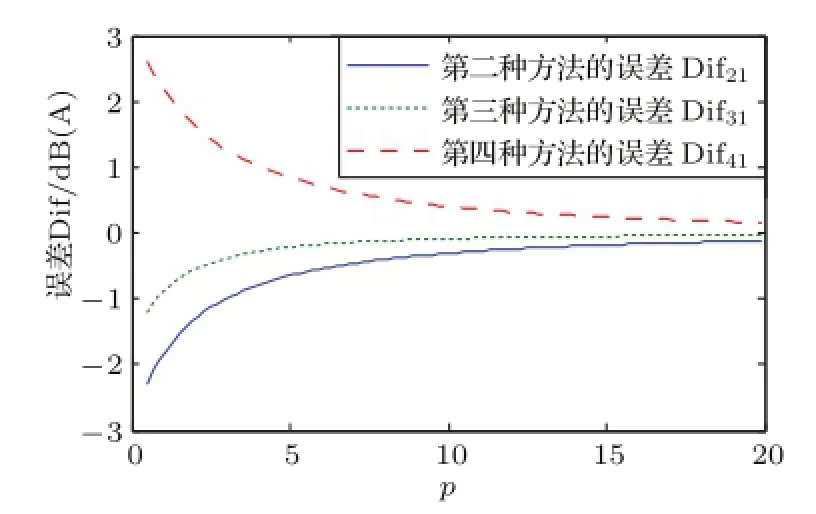
圖4 雙向8車道不同測點處不同計算方法引起的誤差Fig.4 Errors induced by different methods of two-way 8 lanes
4 實際驗證
上述理論分析僅適用于理想的道路和流量條件,然而應用于實際情況時,車流量并不是均勻地行駛在各車道上,道路中間往往有綠化帶或每條車道寬度不一致等狀況。因而,將實測車流量(假設實測的是整條道路的車流量)平均分配到每條車道上便不再準確,不同方法的誤差計算便不再只由參數p決定。針對實際情況,上述誤差分析結果的適用情況值得考究。
實測北京市一級公路白馬路(京沈路與小中河橋之間路段)的各項道路參數、各車道的車流量及平均速度,道路雙向4車道,兩側最外側均有1車道為非機動車道,道路每條機動車道寬度為3.75 m,道路中間有5 m寬的綠化帶,近側車流量偏低,遠側車流量偏高,車流量實測參數如表1所示。兩側大中小車輛平均運行速度分別為63.7 km/h、55.3 km/h、65.6 km/h。運用實際參數(認為各車道車輛平均行駛速度相同)計算不同線聲源簡化方法在距離路肩1 m、10 m、20 m和30 m共4個觀測點的誤差,如圖5所示。

表1各車道車流量Table 1 Traffic volume of each lane

圖5 實際道路不同測點處不同計算方法引起的誤差Fig.5 Errors induced by different methods of actual roads
可以看出,盡管實測道路與理論分析假定條件并不完全一致,但不同方法引起的誤差隨p值的變化規律與理論分析結果基本趨勢一致。
分析表明,不同方法計算出的觀測點噪聲大小為L2<L3<L1<L4;第三種方法計算的誤差最小,對于雙向4車道以下的道路,第二種方法計算的誤差最大,對于雙向6車道以上的道路,第四種方法計算的誤差為最大;觀測點與道路越近,誤差越大;道路越寬,誤差越大。
當觀測點p值較大時,采用第三種方法或第二種方法計算觀測點噪聲引起的誤差較小。假設允許的計算誤差為0.5 dB,對于雙向4車道的道路,p值大于4(也就是觀測到路肩距離大于7 m,假定車道寬度為3.5 m)的觀測點采用上述兩種方法均滿足誤差要求;對于雙向6車道的道路,p值大于6的觀測點均滿足誤差要求;對于雙向8車道的道路,p值大于8的觀測點均滿足誤差要求。
5 結論
德國RLS90模型將等效道路線聲源位置位于道路兩側最外車道中心處的方法引起的誤差較大;法國NMPB模型和日本ASJ模型將每條車道看作1個線聲源,也可以根據精度需求將道路等效為2個線聲源,等效線聲源位置分別位于道路兩側中心線,這種處理方法引起的誤差較小。
一般地,在觀測點與路肩距離較大時,將道路簡化為2條線聲源,線聲源位于道路兩側中心線,甚至將道路簡化為1條線聲源,線聲源位于道路中軸的處理方法引起的誤差較小。
致謝感謝環保公益性行業專項《基于噪聲地圖的環境噪聲評價技術》和北京市科學技術研究院萌芽計劃《縱坡道路噪聲分布規律研究》對本文研究的大力支持。
[1]Department of Transport Welsh Office.Calculation of road traffic noise[M].London:HER Majesty's Stationery Office,1988.
[2]BESNARD F,HAMET J F,LELONG J,et al.Road noise prediction 1-Calculating sound emission from road traffic,Sétra[M].France:Sétra,2011.
[3]Kohei Yamamoto.Road traffic noise prediction model “ASJ RTN-Model 2008”:Report of the Research Committee on Road Traffic Noise[J].Acoust.Sci.&Tech.,2010,31(1):2-55.
[4]Richtlinie für den l?rmschutz an stra?en(RLS-90)-Guidelines for noise protection on streets[M].Berlin:Springer,1990.
[5]HJ2.4-2009.環境影響評價技術導則-聲環境[S].
Optimization of the equivalent position of road line-source
JIANG Congshuang1,2WU Rui1,2YANG Jie1,2
(1 Beijing Municipal Institute of Labor Protection,Beijing 100054,China)(2 State Environmental Protection Engineering Center for City Noise&Vibration Control,Beijing 100054,China)
Generally,each lane is treated as a line-source when calculating road traffic noise.However,in order to simplify calculation,the entire road may be equivalent to as one line-source located at centerline of the road,or equivalent to two line-sources located at centerline or centerline of outside lanes of each road side respectively.Different calculation formulae of sound pressure level at receiver points of those methods are deduced.Then,derived errors of those formulae are discussed.The results demonstrate that the simplification,which the entire road is treated as two line-sources located at centerline of each road side,has the smallest error than the other two methods.
Road line-source,Equivalent position of the road line-source,Optimization
TB533+.4
A
1000-310X(2015)03-0255-05
10.11684/j.issn.1000-310X.2015.03.011
2014-11-03收稿;2015-01-30定稿
?環保公益性行業專項和北京市科學研究技術研究院萌芽計劃
蔣從雙(1989-),男,安徽人,碩士,研究方向:交通噪聲。?
E-mail:jcs_bmilp@126.com
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56