雷達(dá)站站址誤差對(duì)多機(jī)協(xié)同航跡欺騙干擾的影響分析
2015-10-28 03:05:52王國(guó)宏吳健平
海軍航空大學(xué)學(xué)報(bào) 2015年6期
關(guān)鍵詞:關(guān)聯(lián)飛機(jī)
王國(guó)宏,楊 忠,吳健平
(1.海軍航空工程學(xué)院a.信息融合研究所;b.研究生管理大隊(duì),山東煙臺(tái)264001;2.國(guó)防信息學(xué)院,武漢430000)
雷達(dá)站站址誤差對(duì)多機(jī)協(xié)同航跡欺騙干擾的影響分析
王國(guó)宏1a,楊忠1b,吳健平2
(1.海軍航空工程學(xué)院a.信息融合研究所;b.研究生管理大隊(duì),山東煙臺(tái)264001;2.國(guó)防信息學(xué)院,武漢430000)
多機(jī)協(xié)同航跡欺騙干擾是專(zhuān)門(mén)針對(duì)雷達(dá)網(wǎng)的一種新的電子干擾手段。文章在介紹了多機(jī)協(xié)同航跡欺騙干擾基本原理的基礎(chǔ)上,重點(diǎn)對(duì)雷達(dá)網(wǎng)內(nèi)雷達(dá)站址誤差對(duì)航跡欺騙干擾的影響進(jìn)行了分析,推導(dǎo)了有關(guān)理論模型,并以融合中心采用K近似域(K-NN)航跡關(guān)聯(lián)準(zhǔn)則為背景,仿真分析了雷達(dá)站址誤差對(duì)航跡欺騙干擾的影響,得出了雷達(dá)站址誤差對(duì)航跡欺騙干擾性能有重要影響、但此影響隨電子戰(zhàn)飛機(jī)與雷達(dá)站間的距離增大而降低的結(jié)論。
多機(jī)協(xié)同;航跡欺騙;雷達(dá)網(wǎng);站址誤差;K-NN
多機(jī)協(xié)同航跡欺騙是專(zhuān)門(mén)針對(duì)雷達(dá)網(wǎng)的一種新的電子干擾手段,得到了許多學(xué)者的關(guān)注[1-4],其中,文獻(xiàn)[1]最早提出多機(jī)協(xié)同航跡欺騙的基本概念,建立了多機(jī)協(xié)同飛行的航路規(guī)劃模型;文獻(xiàn)[2]提出采用分散模型預(yù)測(cè)控制技術(shù)實(shí)現(xiàn)電子站飛機(jī)編隊(duì)的協(xié)同控制;文獻(xiàn)[3]進(jìn)一步驗(yàn)證了多機(jī)協(xié)同航跡欺騙的可行性;文獻(xiàn)[4]將最優(yōu)控制理論引入到了航路規(guī)劃問(wèn)題中,提出了一種在線的實(shí)時(shí)控制技術(shù)。
實(shí)際應(yīng)用中,敵方各雷達(dá)站的站址是通過(guò)電子偵察等手段獲取,難免存在誤差[5-7],而上述關(guān)于電子戰(zhàn)飛機(jī)編隊(duì)航跡欺騙的研究均是假定不存在雷達(dá)站址誤差情況下得到的。雷達(dá)站址誤差對(duì)電子戰(zhàn)飛機(jī)編隊(duì)航跡欺騙的影響如何,是實(shí)際工程應(yīng)用中需要關(guān)注的問(wèn)題[8]。本文分析了電子戰(zhàn)飛機(jī)在航跡欺騙過(guò)程中雷達(dá)站址誤差和融合中心K近似域(K-NN)航跡關(guān)聯(lián)準(zhǔn)則對(duì)航跡欺騙干擾的影響,得出了一些結(jié)論,對(duì)開(kāi)展雷達(dá)網(wǎng)航跡欺騙干擾和雷達(dá)網(wǎng)抗航跡欺騙干擾具有一定的參考價(jià)值。
1 雷達(dá)站址誤差對(duì)多機(jī)協(xié)同航跡欺騙干擾的影響
多機(jī)協(xié)同航跡欺騙的基本原理如圖1所示,其中,Sa、Sb、Sc表示雷達(dá),Ea、Eb、Ec表示干擾方派遣的電子戰(zhàn)飛機(jī)。在實(shí)施干擾之前,干擾方要提前設(shè)計(jì)出要進(jìn)行的航跡欺騙,包括期望生成的虛假航跡以及各電子戰(zhàn)飛機(jī)的飛行航路。在航跡欺騙過(guò)程中,電子戰(zhàn)飛機(jī)要在相應(yīng)的時(shí)間節(jié)點(diǎn)飛臨預(yù)定的空間位置,利用隨機(jī)攜帶的電子干擾設(shè)備進(jìn)行干擾,并通過(guò)協(xié)同控制,使得干擾信號(hào)形成的虛假目標(biāo)在空間上巧妙重合,如圖1中P1、P2所示,最終實(shí)現(xiàn)對(duì)雷達(dá)網(wǎng)的欺騙。在實(shí)際應(yīng)用中,由于航跡欺騙過(guò)程必然包含來(lái)自多方面的誤差,因而更為一般的航跡欺騙模型見(jiàn)圖2。
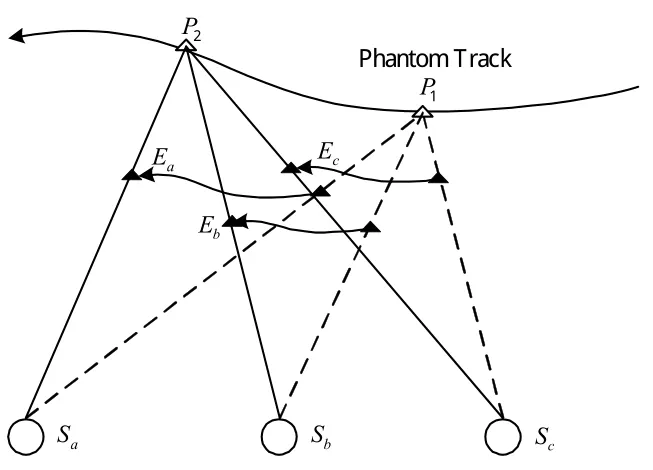
圖1 航跡欺騙的基本原理Fig.1 Basic principle of track deception
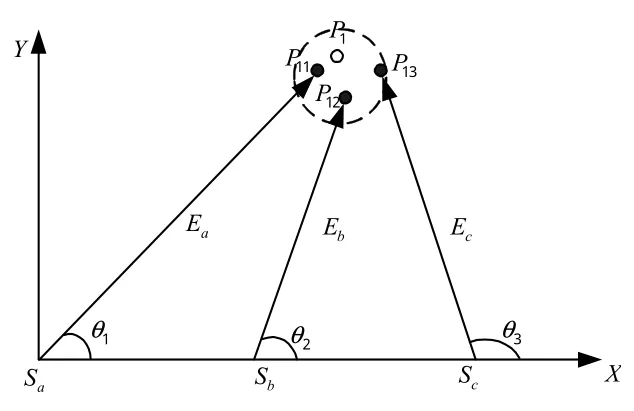
圖2 電子戰(zhàn)飛機(jī)轉(zhuǎn)發(fā)的虛假目標(biāo)Fig.2 False targets of ECAVs
圖2中,P1是電子戰(zhàn)飛機(jī)編隊(duì)預(yù)期產(chǎn)生的理想虛假目標(biāo),P11、P12、P13是由電子戰(zhàn)飛機(jī)Ea、Eb、Ec分別干擾雷達(dá)Sa、Sb、Sc所形成的測(cè)量點(diǎn)跡。由于航跡欺騙過(guò)程中存在各方面的誤差,導(dǎo)致P11、P12、P13偏離了預(yù)設(shè)虛假目標(biāo)P1。由于雷達(dá)網(wǎng)在數(shù)據(jù)融合處理的過(guò)程中將會(huì)利用航跡關(guān)聯(lián)或者點(diǎn)跡關(guān)聯(lián)對(duì)公共監(jiān)區(qū)內(nèi)的航跡(點(diǎn)跡)進(jìn)行相關(guān)性檢驗(yàn),當(dāng)P11、P12、P13之間的偏差足夠大時(shí),由它們生成的虛假航跡(點(diǎn)跡)在關(guān)聯(lián)檢驗(yàn)的過(guò)程中就會(huì)被剔除,從而達(dá)不到預(yù)期的航跡欺騙效果。
引起實(shí)際虛假目標(biāo)偏離預(yù)設(shè)虛假目標(biāo)的原因是多方面的。下面主要分析雷達(dá)站址誤差對(duì)航跡欺騙干擾的影響。
假設(shè)在同一時(shí)刻,電子戰(zhàn)飛機(jī)編隊(duì)為雷達(dá)網(wǎng)釋放的虛假目標(biāo)集為,其中,q對(duì)應(yīng)雷達(dá)網(wǎng)內(nèi)的雷達(dá)數(shù)量。假設(shè)虛假目標(biāo)Pi的位置坐標(biāo)為XPi=[xPi,yPi],i=1,2,…,q,則虛假目標(biāo)Pi與虛假目標(biāo)Pj(i≠j)之間的距離為

相應(yīng)的,所有虛假目標(biāo)之間的平均距離為[9]:

顯然,虛假目標(biāo)之間的平均距離越小,則它們的空間相關(guān)性就越高。在理想條件下Dij=0(i≠j),并且=0,也即虛假目標(biāo)之間完全重合。
從航跡欺騙的基本原理可知,在干擾方對(duì)雷達(dá)網(wǎng)進(jìn)行航跡欺騙之前,需要對(duì)雷達(dá)站進(jìn)行偵察定位。定位不準(zhǔn)將使電子戰(zhàn)飛機(jī)實(shí)際釋放的虛假目標(biāo)偏離預(yù)先設(shè)計(jì)的虛假目標(biāo),如圖3所示。
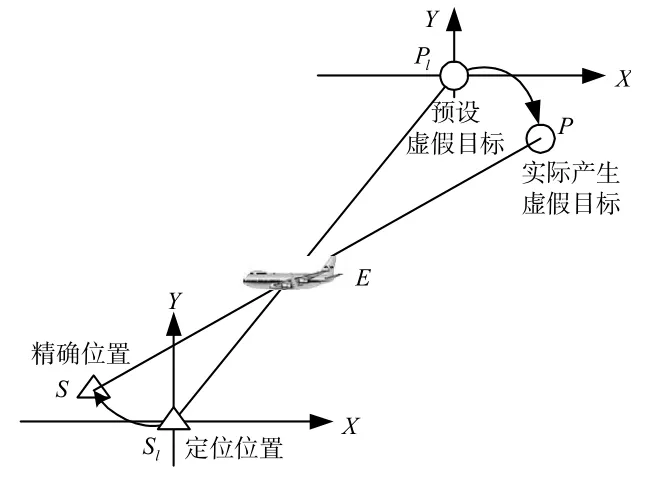
圖3雷達(dá)站址誤差對(duì)虛假航跡欺騙的影響Fig.3 Influence of false track deception with radar location error
圖3中,Sl=[xsl,ysl]T為電子戰(zhàn)飛機(jī)編隊(duì)事先偵察獲得的雷達(dá)位置,S=[xs,ys]T為雷達(dá)的真實(shí)位置。由于偵察過(guò)程存在誤差,導(dǎo)致Sl偏離S。令δs=Sl-S=[Δxs,Δys]T為雷達(dá)的站址誤差,設(shè)P、Pl的位 置 分 別 為P=[xp,yp]T、Pl=[xpl,ypl]T,定 義δp=P-Pl=[Δxp,Δyp]T為虛假目標(biāo)偏離誤差。下面分析雷達(dá)站址誤差與虛假目標(biāo)偏離誤差的大小關(guān)系。
假設(shè)電子戰(zhàn)飛機(jī)的位置坐標(biāo)為E=[xe,ye]T,則電子戰(zhàn)飛機(jī)與圖3中4個(gè)點(diǎn)的距離分別為:
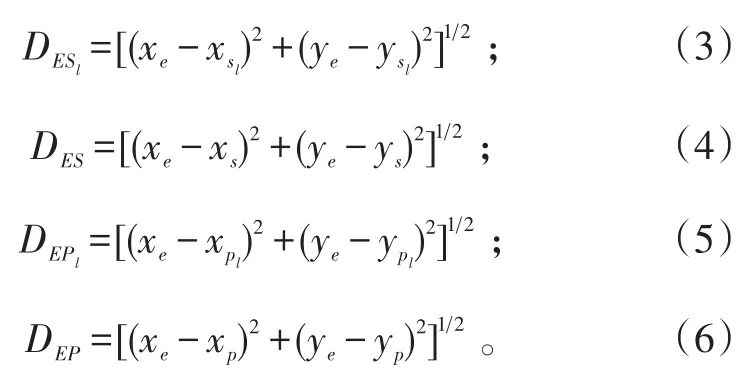
由于電子戰(zhàn)飛機(jī)對(duì)雷達(dá)脈沖的距離延時(shí)始終是根據(jù)產(chǎn)生預(yù)設(shè)虛假目標(biāo)而計(jì)算,因此,DEPl=DEP,并且根據(jù)圖3中的幾何關(guān)系可知:

將式(7)、(8)代入可得:
在雷達(dá)站址誤差較小的情況下,DES≈DESl,此時(shí)相應(yīng)地有

要說(shuō)明的是,在實(shí)施航跡欺騙之前,電子飛機(jī)就已經(jīng)獲取了雷達(dá)站的位置坐標(biāo),因而在整個(gè)航跡欺騙過(guò)程中,雷達(dá)站址誤差為常量。從站址誤差轉(zhuǎn)換因子的定義可知,ε的取值只能在較小的范圍內(nèi)變化,結(jié)合式(10)可知,由雷達(dá)站址誤差引起的虛假目標(biāo)偏離誤差也幾乎是一個(gè)常量。
另外,對(duì)于分布式雷達(dá)網(wǎng),航跡欺騙的最終目的是在雷達(dá)網(wǎng)的融合中心形成具有空間相關(guān)性的虛假航跡[10],但是在雷達(dá)網(wǎng)數(shù)據(jù)處理過(guò)程中,首先需要對(duì)來(lái)自各部雷達(dá)的航跡進(jìn)行關(guān)聯(lián)檢驗(yàn),若虛假航跡組合不能通過(guò)航跡關(guān)聯(lián),那么它們就達(dá)不到航跡欺騙的效果。因此,航跡關(guān)聯(lián)準(zhǔn)則對(duì)航跡欺騙干擾效果也有重要的影響。在各種航跡關(guān)聯(lián)算法中,K-NN航跡關(guān)聯(lián)方法是一種綜合性能好且易于工程實(shí)現(xiàn)的方法[6],KNN航跡關(guān)聯(lián)算法認(rèn)為,在N0次最近鄰航跡關(guān)聯(lián)檢驗(yàn)中,若至少有K次關(guān)聯(lián)成功,則判斷參與關(guān)聯(lián)的目標(biāo)狀態(tài)估計(jì)與來(lái)源于同一個(gè)目標(biāo),其中幾種常用的K-NN判決準(zhǔn)則包括2/3準(zhǔn)則、3/4準(zhǔn)則和4/7準(zhǔn)則等。
2 仿真實(shí)驗(yàn)
2.1仿真場(chǎng)景設(shè)置
以3架電子戰(zhàn)飛機(jī)對(duì)3部雷達(dá)的航跡欺騙為背景,假設(shè)3部雷達(dá)的距離量測(cè)誤差標(biāo)準(zhǔn)差均為100m,方位角量測(cè)誤差標(biāo)準(zhǔn)差均為0.1°,3部雷達(dá)的精確位置分別為 Sa=(10 000m,0m)、Sb=(20km,5km)、Sc=(30 000m,0m),電子戰(zhàn)飛機(jī)為雷達(dá)網(wǎng)預(yù)設(shè)的虛假目標(biāo)初始狀態(tài)為(15km,326m/s,100km,0m/s)。
干擾歷時(shí)100 s,在0~9 s內(nèi)預(yù)設(shè)虛假目標(biāo)做勻速直線運(yùn)動(dòng);之后,預(yù)設(shè)虛假目標(biāo)在各時(shí)間段做勻加速運(yùn)動(dòng),其中,10~29 s內(nèi)加速度大小為(5m/s2,-2m/s2),30~55 s內(nèi)加速度大小為(-2m/s2,4m/s2),56~79 s內(nèi)加速度大小為(0,-5m/s2),80~90 s內(nèi)加速度大小為(0,0);最后,在91~100 s預(yù)設(shè)虛假目標(biāo)又回到勻速直線運(yùn)動(dòng)。
在整個(gè)過(guò)程中,電子戰(zhàn)飛機(jī)始終限制在對(duì)應(yīng)雷達(dá)與預(yù)設(shè)虛假目標(biāo)的連線上,并且假設(shè)它們與對(duì)應(yīng)雷達(dá)站之間距離保持恒定,分別為 DEaSa=35km,。在理想條件下,電子戰(zhàn)飛機(jī)編隊(duì)對(duì)雷達(dá)網(wǎng)的欺騙場(chǎng)景如圖4所示。

圖4 多機(jī)協(xié)同航跡欺騙場(chǎng)景Fig.4 Track deception scene of multi-aircraft cooperative
2.2仿真結(jié)果
1)虛假目標(biāo)之間的平均距離。在上述初始條件下,須考慮雷達(dá)站址誤差對(duì)虛假航跡空間相關(guān)性的影響。假設(shè)電子戰(zhàn)飛機(jī)獲取的雷達(dá)位置分別偏離各自的精確位置)。此時(shí),實(shí)際虛假航跡仿真結(jié)果如圖5 a)所示。
其他條件不變,逐漸增大3部雷達(dá)的站址誤差(增大步數(shù)為10步),使均勻增大到均勻增大到均勻增大到(200m,-200m)。得出雷達(dá)站址誤差較大時(shí)實(shí)際虛假航跡偏離預(yù)設(shè)虛假航跡,仿真結(jié)果如圖5 b)所示。
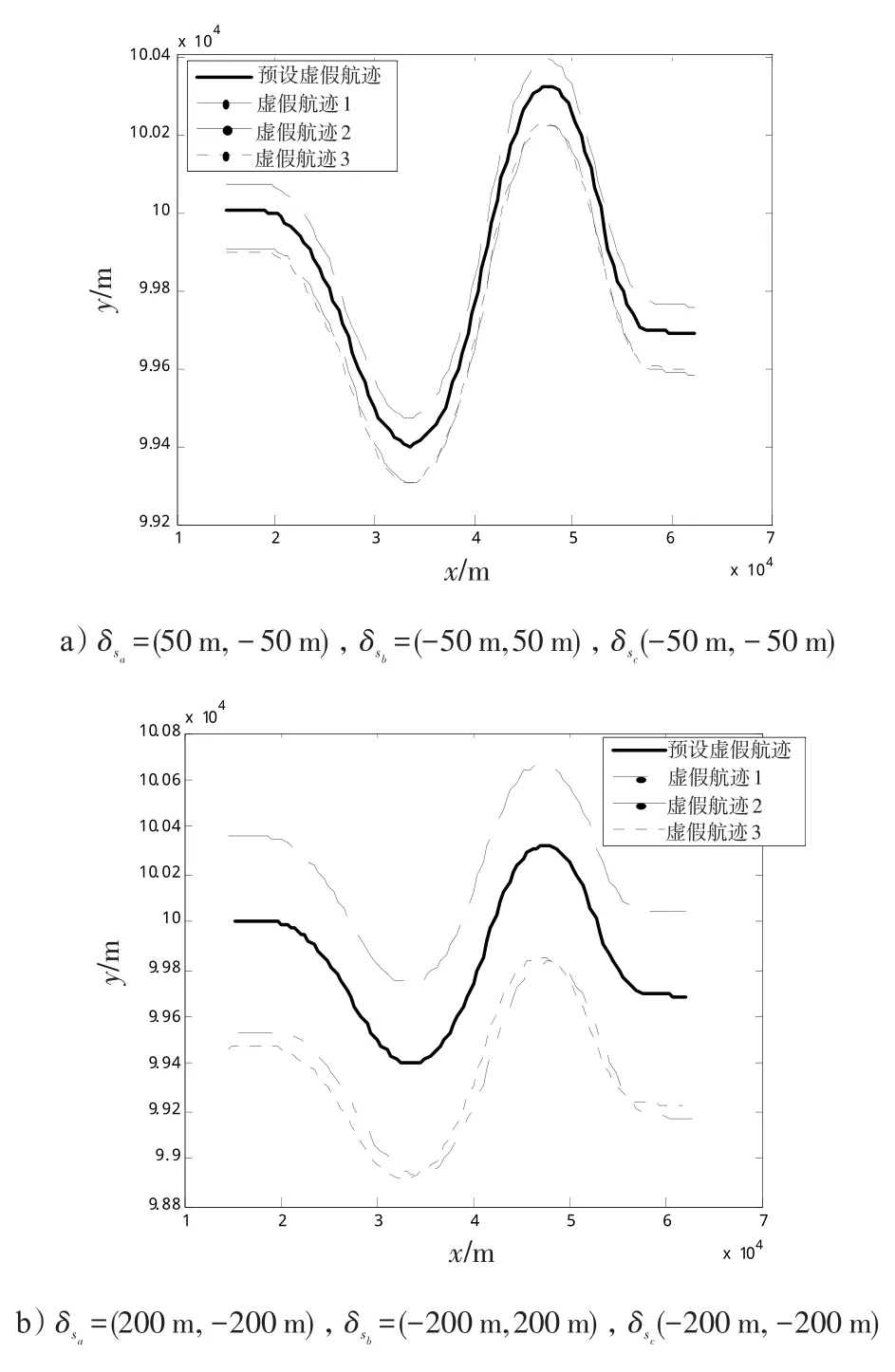
圖5 雷達(dá)站址誤差對(duì)航跡欺騙的影響Fig.5 Influence of track deception with radar location error
2)虛假目標(biāo)航跡關(guān)聯(lián)。假設(shè)雷達(dá)網(wǎng)內(nèi)各雷達(dá)采用Singer濾波方法對(duì)量測(cè)數(shù)據(jù)進(jìn)行濾波,濾波形成的航跡被送往融合中心,在融合中心利用K-NN法對(duì)虛假航跡進(jìn)行關(guān)聯(lián)檢驗(yàn),得出雷達(dá)站址誤差對(duì)虛假目標(biāo)航跡關(guān)聯(lián)的影響的仿真結(jié)果如表1、圖6所示。
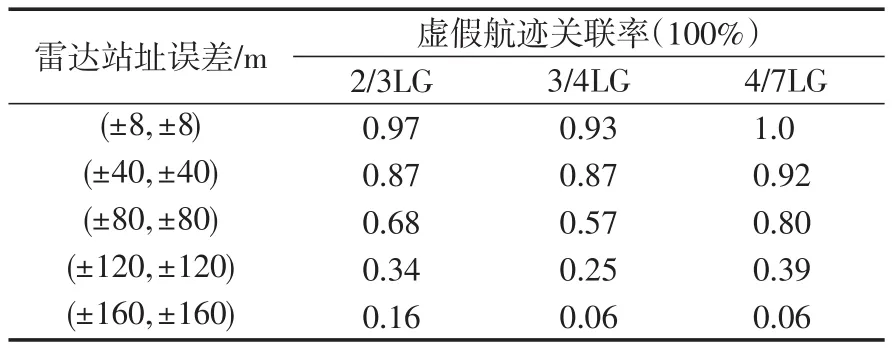
表1 不同雷達(dá)站址誤差下虛假目標(biāo)航跡關(guān)聯(lián)率Tab.1 Phantom track association ratio under different radar location error
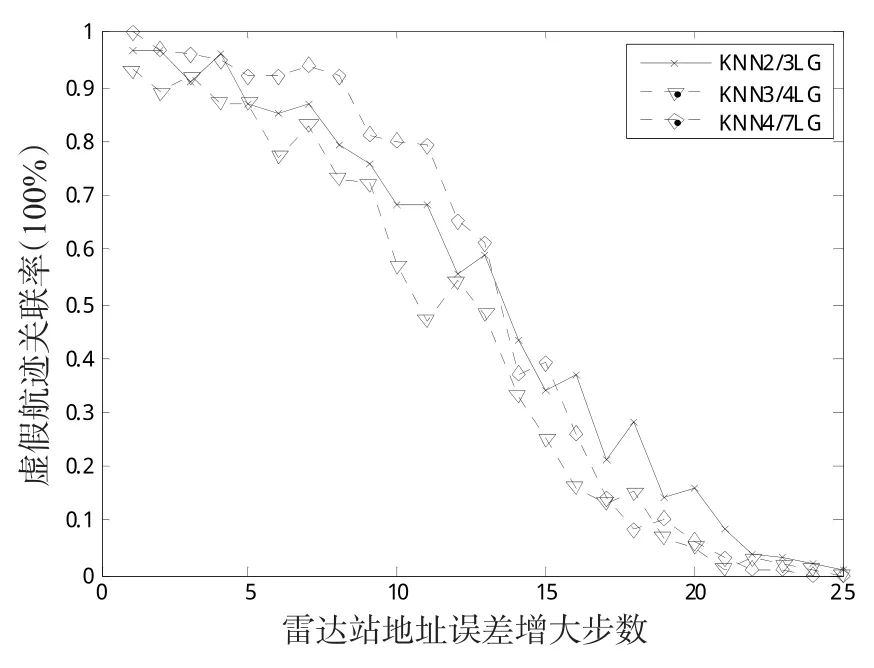
圖6 雷達(dá)站址誤差對(duì)虛假目標(biāo)航跡關(guān)聯(lián)的影響Fig.6 Effect of radar location error on phantom track association
2.3仿真結(jié)論
仿真看出,在航跡欺騙過(guò)程中,雷達(dá)站的站址誤差使實(shí)際虛假目標(biāo)偏離了電子戰(zhàn)飛機(jī)編隊(duì)預(yù)先設(shè)計(jì)的虛假目標(biāo),實(shí)際虛假目標(biāo)偏離誤差的大小與雷達(dá)站址誤差正相關(guān);雷達(dá)站址誤差達(dá),時(shí),實(shí)際虛假目標(biāo)間的平均距離達(dá)到1km左右,說(shuō)明雷達(dá)站址誤差對(duì)航跡欺騙的效果影響非常大,在多機(jī)協(xié)同航跡欺騙過(guò)程中,若電子戰(zhàn)飛機(jī)對(duì)雷達(dá)網(wǎng)內(nèi)雷達(dá)的定位不準(zhǔn),可能使干擾失去意義;隨著電子戰(zhàn)飛機(jī)與雷達(dá)站間的距離增大,雷達(dá)站址誤差對(duì)虛假航跡造成的影響逐漸降低;同時(shí),隨著雷達(dá)網(wǎng)融合中心采用不同的航跡關(guān)聯(lián)準(zhǔn)則,也會(huì)對(duì)航跡欺騙干擾性能產(chǎn)生一定的影響。
3 結(jié)論
本文分析了雷達(dá)網(wǎng)內(nèi)雷達(dá)站址誤差對(duì)航跡欺騙干擾的影響,并進(jìn)行了理論分析和仿真驗(yàn)證,仿真結(jié)果表明,雷達(dá)站址誤差對(duì)航跡欺騙干擾性能有重要影響,隨著電子戰(zhàn)飛機(jī)與雷達(dá)站之間的距離增大,雷達(dá)站址誤差對(duì)虛假航跡造成的影響逐漸降低;同時(shí),隨著雷達(dá)網(wǎng)融合中心采用不同的航跡關(guān)聯(lián)準(zhǔn)則,也會(huì)對(duì)航跡欺騙干擾性能產(chǎn)生一定的影響。
[1]PACHTER M,CHANDLER P R,PURVIS K B,et al. Multiple radar phantom tracks from cooperating vehicles using range-delay deception[C]//Proceedings of the 4thInternational Conference on Cooperative Control and Optimization.Destin,F(xiàn)L,2003:1-14.
[2]SAMMARTINO P F,BAKER C J,GRIFFITHS H D,et al.Decentralize model predictive control of cooperating UAVs[C]//43rdConference on Decision and Control.Atlantis,2004:4286-4291.
[3]PURVIS K B,CHANDLER P R,PACHTER M.Feasible flight paths for cooperative generation of a phantom radar track[J].Journal of Guidance,Control,and Dynamics,2006,29(3):653-661.
[4]PURVIS K B,ASTROM K J,KHAMMASH M.Online control strategies for highly coupled cooperative UAVs[C]//IEEE American Control Conference.New York,2007:3961-3966.
[5]BROWN R G,HWANG P Y.Introduction to random signals and applied kalman filtering[M].3rded.New York:Wiley,1997:323-325.
[6]PURVIS K B,?STR?M K J,KHAMMASH M.Estimating radar positions using cooperative unmanned air vehicle teams[C]//Proceedings of Amerenca Control Conference.Portland,OR,2005:3512-3517.
[7]QU YAOHONG,WU JIZHI,ZHANG YOUMIN.Cooperative localization based on the azimuth angles among multiple UAVs[C]//InternationalConference on UnmannedAircraft Systems.Atlanta,2013:947-958.
[8]KOSAKA M,MIYAMOTO S,IRAHA H.A track correlation algorithm for Multisensor intergration[C]//Procedings of the IEEE/AIAA 5thDigital Avionics Systems Conference.1983:1-8.
[9]何友,王國(guó)宏,陸大金,等.多傳感器信息融合理論與應(yīng)用[M].北京:電子工業(yè)出版社,2010:141,146. HE YOU,WANG GUOHONG,LU DAJIN,et al.Multisensor information fusion with applications[M].Beijing:Publishing House of Electronics Industry,2010:141,146.(in Chinese)
[10]PURVIS K B,ASTROM K J,KHAMMASH M.Estimation and optimal configurations for localization using cooperative uavs[J].IEEE Transactions on Control Systems Technology,2008,16(5):947-958.Influence Analysis of Radar Location Error on Multi-Aircraft Cooperative Track Deception
WANG Guohong1a,YANG Zhong1b,WU Jianping2
(1.Naval Aeronautical and Astronautical University a.Institute of Information Fusion;b.Graduate Students’Brigade,Yantai Shandong 264001,China;2.PLA Academy of National Defense Information,Wuhan 430000,China)
As a novel electronic interference method,multi-aircraft cooperative phantom track deception can release living phantom tracks for radar network.Firstly,basic theory of multi-aircraft cooperatively track deception was introduced,with which basis,influence of radar location error on track deception was key analyzed,and correlative theroy model is de?duced.Then,for K-NN track correlation in fusion center as the background,influence of radar location error on track de?ception was simulated,results that radar location error had a great influence on performance of track deception,and the in?fluence reduce with increase of the distence between electronic combat aircraft vehicles and radar network were obtained.
multi-aircraft cooperative;track deception;radar network;radar location error;K-NN
TN974
A
1673-1522(2015)06-0501-04DOI:10.7682/j.issn.1673-1522.2015.06.001
2015-08-15;
2015-09-28
部委科研基金資助項(xiàng)目(51307060301)
王國(guó)宏(1963-),男,教授,博士,博導(dǎo)。
猜你喜歡
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
讀者(2017年5期)2017-02-15 18:04:18
 海軍航空大學(xué)學(xué)報(bào)2015年6期
海軍航空大學(xué)學(xué)報(bào)2015年6期
- 海軍航空大學(xué)學(xué)報(bào)的其它文章
- 一種多功能訓(xùn)練器械設(shè)計(jì)與實(shí)訓(xùn)試驗(yàn)
- 基于預(yù)警直升機(jī)的驅(qū)護(hù)艦編隊(duì)防空作戰(zhàn)目標(biāo)威脅評(píng)估
- 航母編隊(duì)網(wǎng)絡(luò)化協(xié)同反導(dǎo)裝備體系建設(shè)探討
- 基于電力綜合集成的多繞組雙流發(fā)電機(jī)技術(shù)分析
- 水下無(wú)線傳感器網(wǎng)絡(luò)目標(biāo)定位算法
- 基于自適應(yīng)徑向基網(wǎng)絡(luò)的艦船RCS統(tǒng)計(jì)特征識(shí)別方法