交叉桿并聯機床結構參數優化
2015-10-28 09:46:10方喜峰張思崇許欽桓汪通悅劉遠偉陳小崗
中國機械工程 2015年1期
關鍵詞:優化
方喜峰 張思崇 許欽桓 汪通悅 劉遠偉 陳小崗
1.江蘇科技大學,鎮江,212003 2.淮陰工學院,淮安,223001
交叉桿并聯機床結構參數優化
方喜峰1張思崇1許欽桓1汪通悅2劉遠偉2陳小崗2
1.江蘇科技大學,鎮江,2120032.淮陰工學院,淮安,223001
增大工作空間和提高靈巧度是并聯機床設計的一項重要任務。依據運動學反解,采用三維搜索的方法得到了帶約束條件的交叉桿并聯機床的工作空間;利用自然坐標法推導了該機床的新型雅可比矩陣;基于工作空間和新型雅可比矩陣獲得了交叉桿并聯機床的靈巧度分布。在此基礎上分析了機床各結構參數對工作空間和全域靈巧度指數的影響規律,然后用最小二乘法進行曲線擬合并以工作空間指數和全域靈巧度指數為優化目標對該機床進行優化,與優化前相比,兩項指標分別增大了0.40倍和0.26倍,達到了機構優化的目的。
交叉桿并聯機床;工作空間;新型雅可比矩陣;全域靈巧度指數;結構參數優化
0 引言
交叉桿并聯機床的動平臺采用上下兩層結構,6個頂點交叉布置,具有中心對稱性好、結構剛度高的優點,但同時也犧牲了部分工作空間、降低了運動靈巧性。因此,適當增大工作空間、提高靈巧度是交叉桿并聯機床設計的一項重要任務。并聯機構工作空間解析求解很大程度上依賴機構位置解的研究成果,至今仍沒有完善的方法,目前主要還是通過數值法來求解[1]。Masory等[2]綜合考慮桿長限制、驅動桿的尺寸干涉、轉動副的轉角限制,求解了并聯機構的工作空間。陳小崗等[3]采用數值方法計算了6-UPS并聯機床的工作空間并繪制了相應的位姿空間圖譜。一些學者針對如何在并聯機構整體尺寸有限的情況下獲得更大的工作空間進行了結構尺寸參數優化研究[4-6]。傳統方法推導的雅可比矩陣前3列為長度單位量,后3列為量綱一的量,導致雅可比矩陣呈非均勻性。為了解決這一問題,Gosselin[7]推導了一種新的雅可比矩陣,它是末端執行器上3點的速度向驅動桿速度的映射。Gosselin等[8]基于雅可比條件數提出了用全域靈巧度指數(global dexterity index,GDI)來衡量并聯機床的整體運動學性能。
本文針對BJ-04-02(A)型交叉桿并聯機床工作空間小、姿態實現能力有限等缺陷,采用三維搜索方法對其在桿長限制、桿件尺寸干涉及轉動副轉角限制約束條件下的工作空間進行求解,推導其操作度均勻的新型雅可比矩陣,分析機床各結構參數對工作空間和靈巧度的影響,以工作空間和靈巧度為優化目標,對該機床結構參數進行優化,為該類機床的結構改進提供理論依據。
1 交叉桿并聯機床運動學反解
BJ-04-02(A)型交叉桿并聯機床是Stewart并聯機構的變異結構,如圖1所示,定平臺的6個鉸鏈點Ai(i=1,2,…,6)的外接圓半徑為Ra,弦A2A3、A4A5、A1A6所對應的圓心角為θ;動平臺分上下兩層,兩層之間的距離為H,下層3個鉸鏈點B1、B3、B5的外接圓半徑為Rb,上層3個鉸鏈點B2、B4、B6的外接圓半徑為Rb/3;驅動桿的最小長度、最大長度分別為lmin、lmax;驅動桿的直徑為D0。
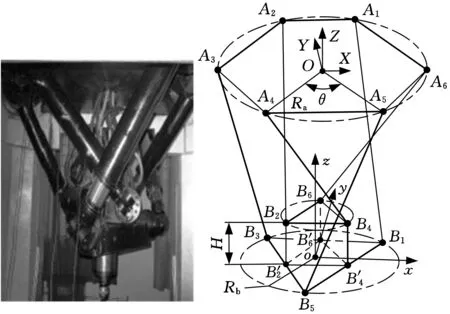
(a)機床實物圖(b)機床結構簡圖圖1 BJ-04-02(A)型交叉桿并聯機床
在機床靜平臺和動平臺上分別建立靜坐標系OXYZ和動坐標系oxyz,靜坐標系的原點O位于靜平臺上各鉸鏈點外接圓的圓心,Y軸為A1A2的中垂線,Z軸垂直于靜平臺向上,X軸由右手螺旋定則確定;動坐標系的原點o位于動平臺下層各鉸鏈點外接圓的圓心,y軸為B1B3的中垂線,z軸垂直于動平臺向上,x軸由右手定則確定,如圖1b所示。
當給定交叉桿并聯機床結構尺寸Ra、θ、Rb、H后,由幾何關系容易得到靜平臺和動平臺上各鉸鏈點在各自坐標系中的坐標向量Ai和bi。動平臺上任一點在動坐標系oxyz中的向量bi可通過坐標變換方法變換到靜坐標系中的向量Bi:
Bi=Tbi+P
(1)
其中,T為動平臺姿態的方向余弦矩陣,P為動坐標系的原點在靜坐標系中的坐標向量。由此可得到驅動桿在靜坐標系中的桿長矢量li:
li=Bi-Ai=Tbi+P-Ai
(2)
從而得到位置反解計算方程:
(3)
2 交叉桿并聯機床工作空間的求解
2.1約束條件
影響并聯機床工作空間的因素有很多,其中桿長限制、驅動桿的尺寸干涉以及轉動副轉角的限制是最主要的3個因素[1]。
2.1.1桿長限制
交叉桿并聯機床受其結構限制,其驅動桿桿長約束條件為
(4)
式中,lmin、lmax分別為各桿最小長度、最大長度。
2.1.2驅動桿的尺寸干涉
實際驅動桿是有一定幾何尺寸的,僅依據運動學反解得到的工作空間內各桿是有可能發生干涉的。設相鄰兩驅動桿中心軸線的空間異面直線距離為Dj,k,則交叉桿并聯機床驅動桿不發生干涉的條件為
Dj,k>D0
(5)
j=1,3,5;k=6,2,4或j=1,3,5;k=2,4,6
2.1.3轉動副轉角的限制
設交叉桿并聯機床靜平臺和動平臺與各驅動桿連接的虎克鉸與球鉸的最大轉角分別為θAmax、θBmax,nAi、nBi分別表示與靜平臺第i個虎克鉸的基座和與動平臺第i個球鉸的基座固結的坐標系Z軸方向的單位矢量,則轉角約束條件為
(6)
2.2求解方法
本文用三維搜索的方法來求解交叉桿并聯機床的工作空間,將三維空間微分成大小一樣的正六面體(邊長為e),判斷并聯機床動平臺的參考點在每個正六面體中心處是否屬于其定向工作空間。判斷一個點是否屬于其定向工作空間,取決于運動學逆解所得的機構位形是否滿足2.1節中3個約束條件。
設單個正六面體的體積為ΔV,則整個工作空間的體積 (workspacevolume)Vws為
(7)
其中,w為滿足約束條件的正六面體個數。工作空間的量綱一指數(workspacevolumeindex)Iwv定義為工作空間體積Vws與平臺體積Vp的比值。即
Iwv=Vws/Vp
(8)
式中,Vp為包含機構及工作空間體積的圓柱體的體積。
3 基于新型雅可比矩陣的靈巧度計算
本文采用Gosselin[7]提出的末端執行器三點法來推導交叉桿并聯機床量綱一致性的雅可比矩陣。在動平臺下層面上定義3個線性無關的點T1(x1y1z1)、T2(x2y2z2)、T3(x3y3z3),動平臺相對靜平臺的位姿就可以用點T1、T2、T3來表示。作直線QBj與T1T3平行且交T1T2于Q點,則Bj的絕對坐標就可用3個點T1、T2、T3表示,如圖2所示。即
OBj=OQ+QBj=k1OT1+k2OT2+
k3(OT3-OT1)=kj,1OT1+kj,2OT2+kj,3OT3
(9)
其中,kj,1、kj,2、kj,3均為常數,與具體選定的3個點T1、T2、T3有關。
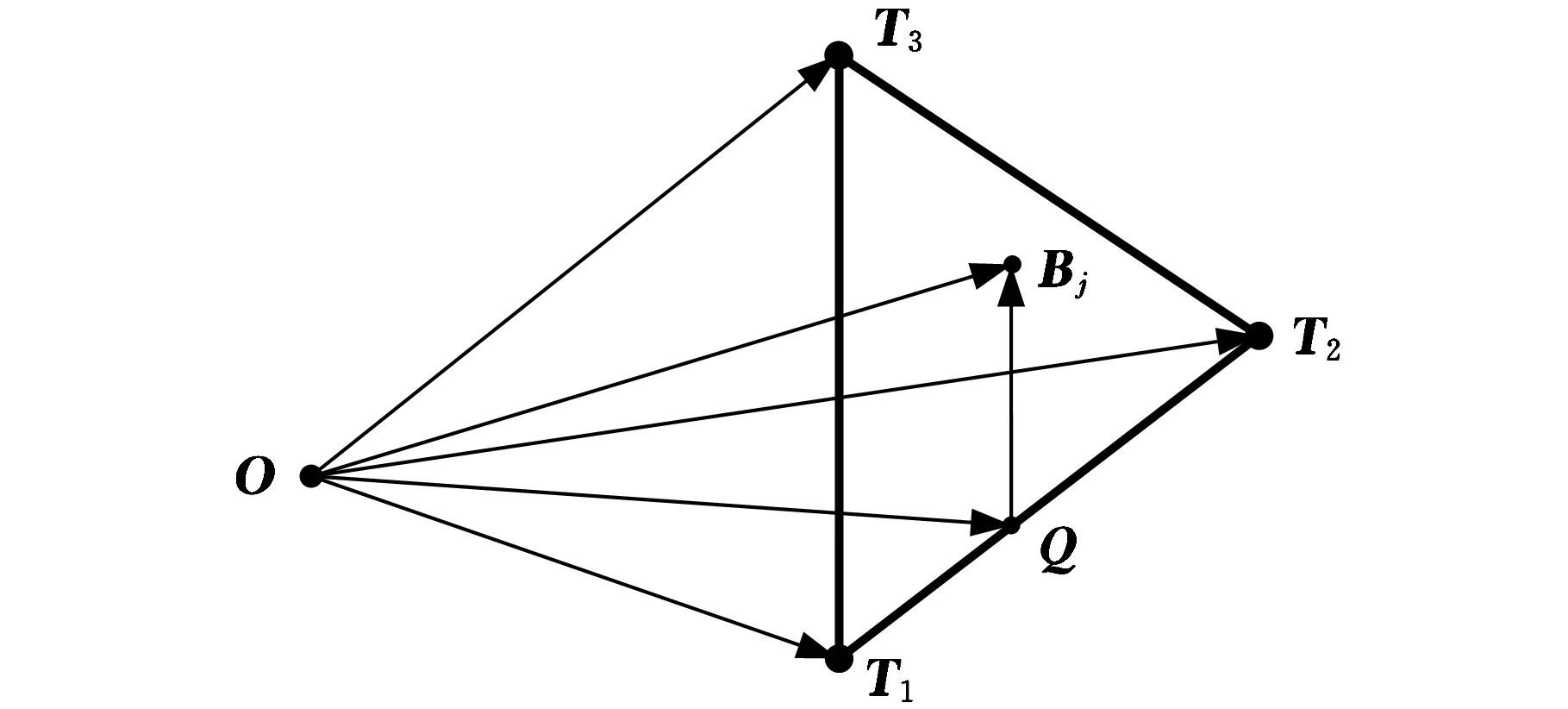
圖2 動平臺鉸鏈點坐標的三點表示
AjBj=ljuj=
(10)
其中,n0為動平臺平面的單位法向量。對式(10)兩邊同時求導得
(11)

(12)
由幾何關系可知,動平臺任意時刻的平面法向量為
n=[n1n2n3]T=T1T2×T2T3=
(13)
設n=f1t1+f2t2+f3t3,則有
(14)

AF=n
(15)
聯立式(13)~式(15)可以得到f1、f2、f3,因此有
(16)
理論上T1、T2、T3可以選取動平臺上任意3個線性無關的點,為計算方便,選取動平臺下層面的3個鉸鏈點B1、B3、B5。將式(16)代入式(12)中得到的矩陣形式為
(17)
其中,J為新型雅可比矩陣,它是動平臺速度向驅動關節速度的映射,具有可操作度均勻性的特點。
全域靈巧度性能度量指標IGD表示并聯機床在其整個工作空間內或其工作空間的某個合理的中央部分靈巧度的平均值[8],即
(18)
其中,dW代表工作空間內某位置一個無限小的元素,k(J)是在指定工作點處雅可比矩陣的條件數。而雅可比矩陣的條件數又可定義為[9]
k(J)=‖J‖‖J-1‖
(19)
最終化簡為
k(J)=σmax/σmin
(20)
其中,σmax為J的譜范數,其值為JTJ最大特征值的開方;1/σmin為J-1的譜范數,其值為JTJ最小特征值的開方。
4 交叉桿并聯機床結構參數優化設計

(a)視角(-37.5 mm,30 mm)
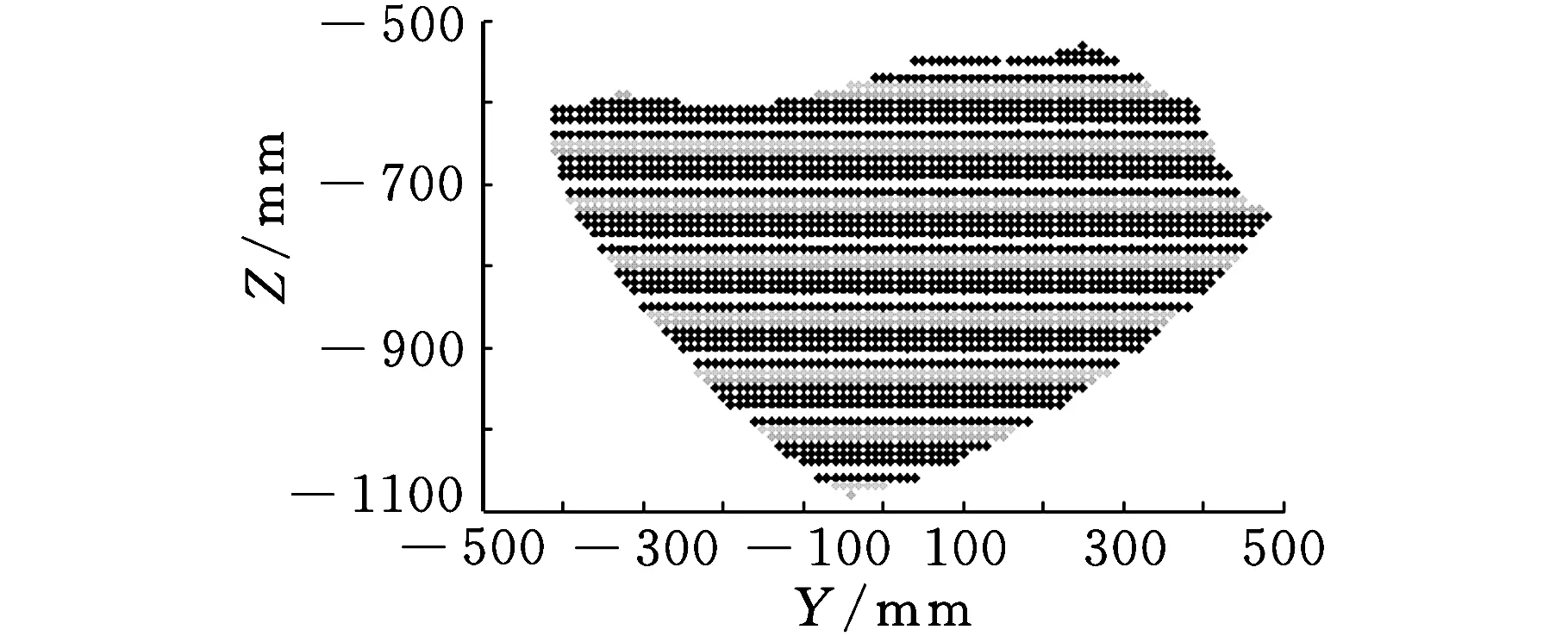
(b)YZ向視圖

(c)XZ向視圖

(d)XY向視圖圖3 交叉桿并聯機床的工作空間

(a)視角(-45 mm,45 mm)
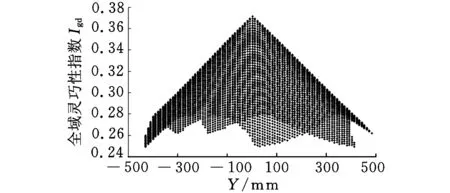
(b)YZ向視圖
(c)XZ向視圖
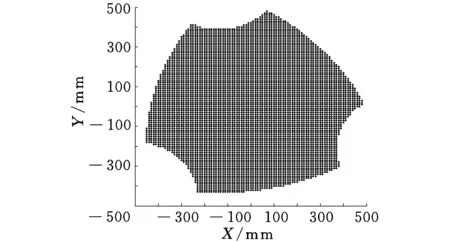
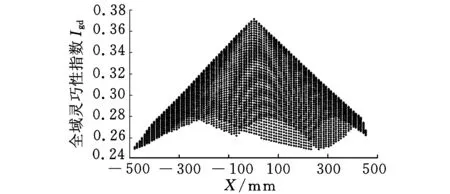
(d)XY向視圖圖4 交叉桿并聯機床靈巧度分布
計算得到交叉桿并聯機床隨其各結構參數在一定范圍內取離散值時工作空間的量綱一指數和全域靈巧度指數,如圖5~圖10所示。其中Rb、H、lmin、lmax-lmin均除以Ra,則橫坐標變為量綱一的量。

圖5 Iwv和Igd隨D變化曲線
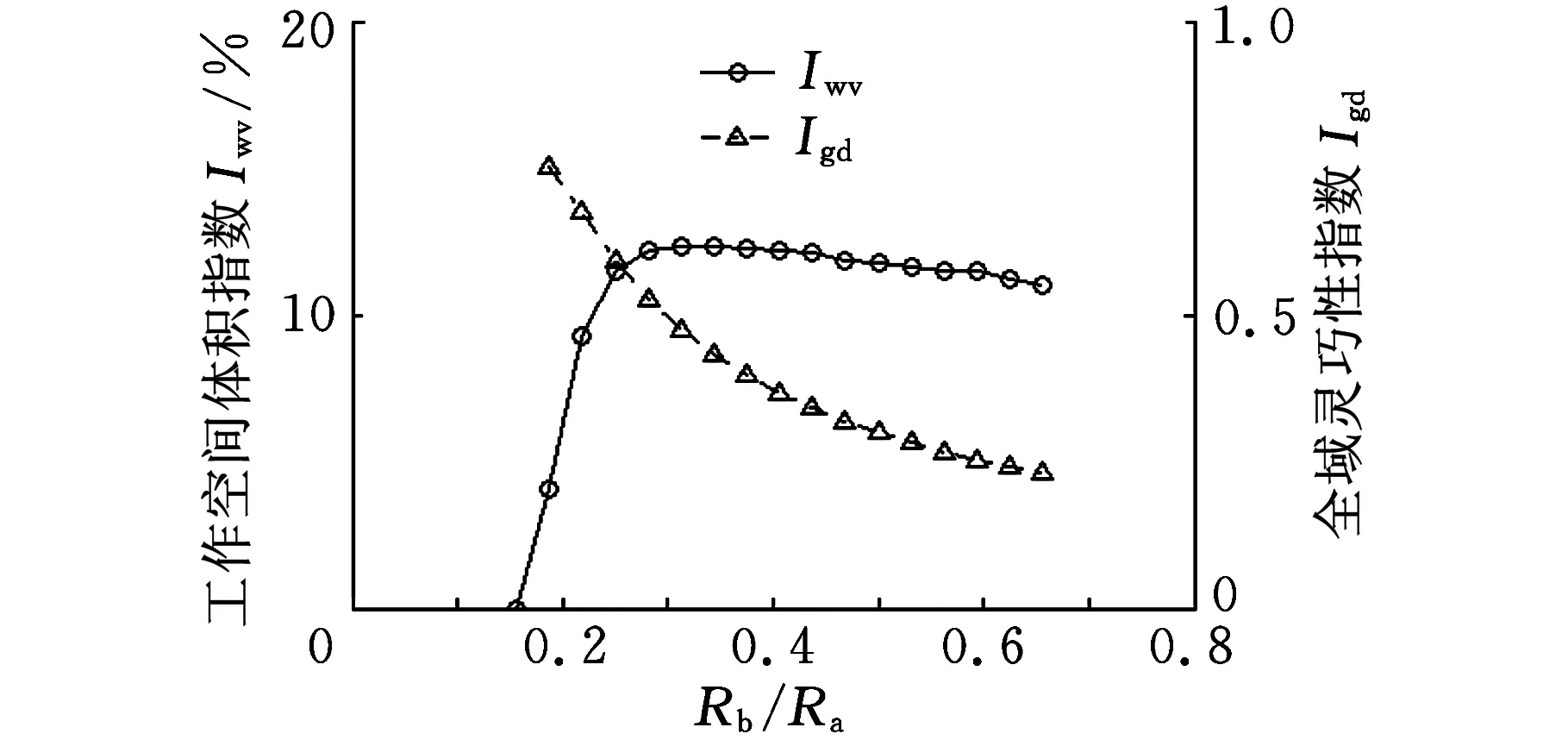
圖6 Iwv和Igd隨Rb/Ra變化曲線

圖7 Iwv和Igd隨H/Ra
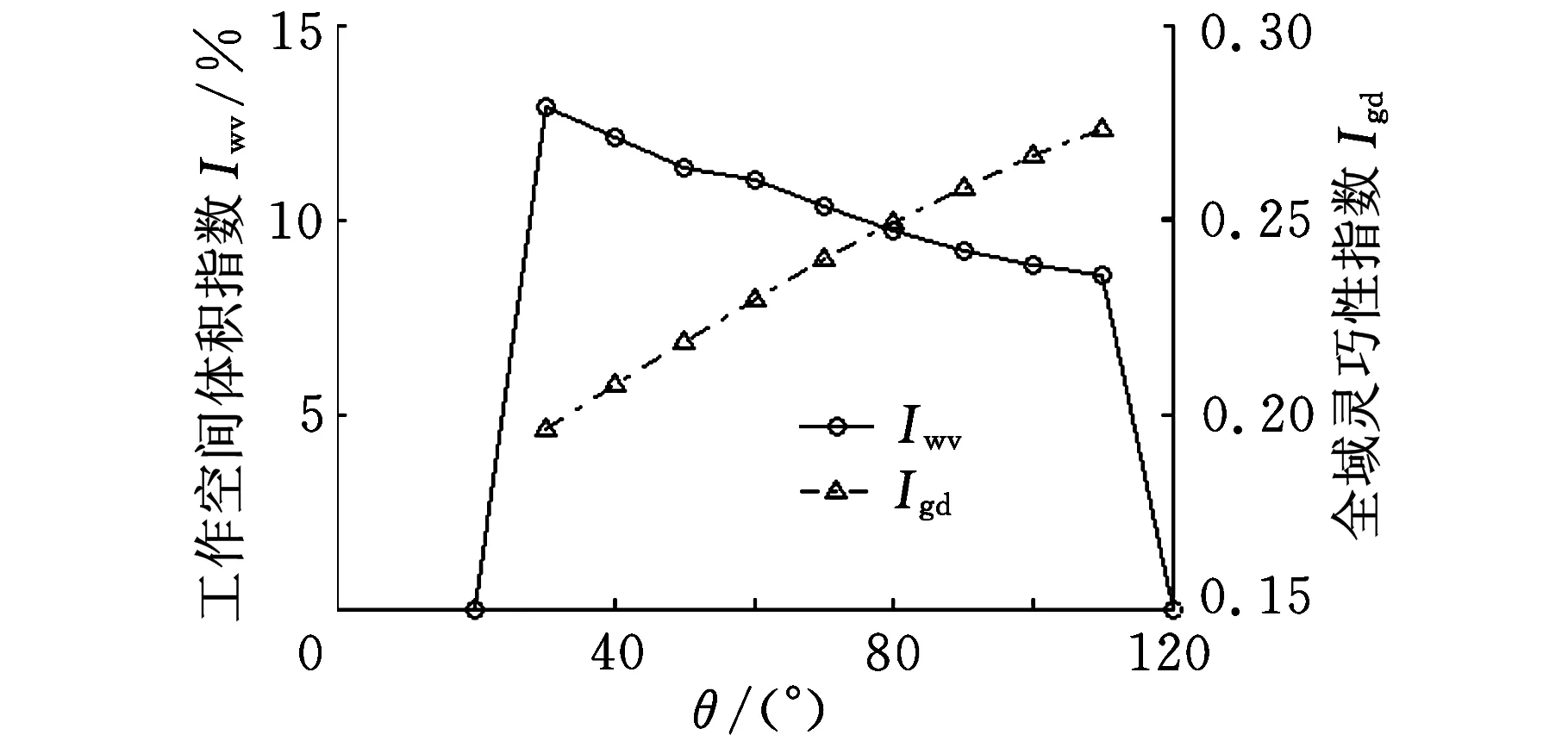
圖8 Iwv和Igd隨θ變化曲線
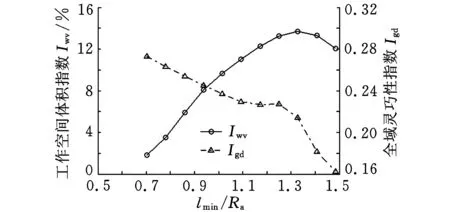
圖9 Iwv和Igd隨lmin/Ra變化曲線
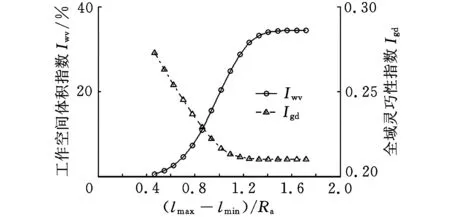
圖10 Iwv和Igd隨(lmax-lmin)/Ra變化曲線
由圖5~圖10中的曲線變化可以得到如下規律:
(1)當驅動桿直徑小于某個臨界值時,動平臺在整個工作空間運動時驅動桿都不會發生干涉;驅動桿直徑不是并聯機床靈巧度的影響因素,靈巧度變化是因為桿件尺寸干涉使工作空間減小。
(2)Iwv先隨Rb/Ra的增大而增大,后隨Rb/Ra的增大而緩慢減小,當Rb/Ra=0.34時,Iwv取得最大值;Igd隨著Rb/Ra的增大而減小。
(3)Iwv先隨H/Ra的增大而增大,后隨H/Ra的增大而減小,當H/Ra=0.34時,Iwv取最大值;Igd與H/Ra成反比,但其變化幅度僅為0.02,因此H/Ra對Igd影響很小,可以忽略。
(4)當30°≤θ≤110°時,Iwv與θ成反比,但當θ<30°或θ>110°時,Iwv因驅動桿桿件尺寸干涉而嚴重減小;Igd與θ成正比。
(5)交叉桿并聯機床驅動桿桿長自身約束條件為lmin>lmax-lmin,所以lmin/Ra>(lmax-lmin)/Ra=0.86,在此范圍內,Iwv先隨lmin/Ra的增大而增大,后隨lmin/Ra的增大而減小,當lmin/Ra=1.33時,Iwv取得最大值;Igd與lmin/Ra成反比。
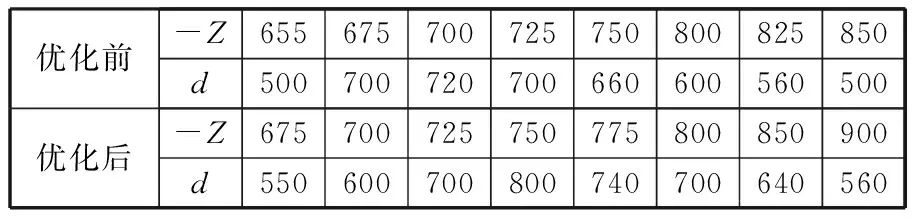
(6)在桿長自身約束條件(lmax-lmin)/Ra 圖5~圖10中的每條曲線都是通過連接相鄰離散點得到的,并非真實的變量函數關系。為了揭示交叉桿并聯機床的Iwv和Igd隨其結構參數的具體變化關系,本文采用最小二乘法對圖5~圖10中交叉桿并聯機床的Iwv和Igd關于其各結構參數的點列數據進行曲線擬合。 令x1=Rb,x2=H,x3=θ,x4=lmin,x5=lmax-lmin;f1(x)為機床工作空間關于機床各結構參數變量的函數;f2(x)為機床靈巧度關于機床各結構參數變量的函數。由此,得到交叉桿并聯機床的Iwv和Igd關于其各結構參數變量的各具體函數f1(x1),f1(x2),…,f1(x5)和f2(x1),f2(x2),…,f2(x5)。 定義參數變量為 定義目標函數為 maxf1(X)=max(Iwv(X))= maxf2(X)=max(Igd(X))= 其中,約束條件為 利用Mathematica軟件求解目標函數maxf1(X)和maxf2(X)的最大值,得到對應的參數變量:x11=370.107 mm,x12=210.939 mm,x13=30°,x14=850.704 mm,x15=768 mm和x21=96 mm,x22=2.64794×10-9mm,x23=110°,x24=550.4 mm,x25=384 mm。 由于工作空間對并聯機床來說具有明確需求,而靈活度指標雖也重要,但其具體大小沒有具體明確要求,即工作空間比靈活度相對于并聯機床的權重較大。針對工作空間和靈巧度相對于并聯機床的重要程度不同,采用加權系數法將機床多目標優化問題轉化為單變量問題。即 xn=(k1x1n+k2x2n)/(k1+k2)n=1,2,…,5 其中,k1、k2分別為x1n、x2n的權重,且k1+k2=1。選取k1=0.5,0.6,…,0.9且k2=0.5,0.4,…,0.1這5種情況,得到對應的機床結構參數變量優化值,見表1。 表1 加權系數法得到的5組機床結構參數優化值 結合圖5~圖9中的曲線變化規律與表1的數據,在確保機床能夠獲得較大工作空間的同時兼顧機床靈巧度的情況下,并且考慮桿件尺寸干涉和機床剛度以及主軸安裝等因素,最終選取D=130 mm、Rb=300 mm,H=160 mm,θ=50°,lmin=800 mm,lmax-lmin=650 mm,對該機床進行優化設計,得到參數優化后的工作空間和靈巧度分布,分別如圖11和圖12所示。 圖11 交叉桿并聯機床優化后的工作空間 圖12 交叉桿并聯機床優化后的靈巧度 為了適應多坐標數控加工的需要,將靈巧度工作空間的規則內接幾何形體定義為機床的編程工作空間。對于Z取不同的值,工作空間截面圖是不同的。表2給出了該機床優化前后部分工作空間截面所包含最大圓的直徑尺寸d。 表2 交叉桿并聯機床工作空間截面尺寸 mm 由表2可以發現,該機床優化前在Z=-700 mm時的工作空間截面最大,其Z向主要加工區域為-850 mm≤Z≤-655 mm,工作空間可包含直徑為500 mm、高度為195 mm的圓柱體;優化后在Z=-750 mm時的工作空間截面最大,Z向主要加工區域為-900 mm≤Z≤-675 mm,工作空間可包含直徑為550 mm、高度為225 mm的圓柱體。 表3給出了交叉桿并聯機床優化前后的Iwv、Igd及其尺寸參數,工作空間增加了0.4倍,全域靈巧度指數提高了0.26倍,達到了預期目標。由于本文中Igd是以新型雅可比矩陣為基礎得到的,不會隨機床結構參數同級放大或縮小而改變,故優化得到的機床尺寸參數可根據需要按比例縮放。 表3 交叉桿并聯機床優化前后的Iwv和Igd及其尺寸參數 以上分析都是在假定θAmax=θBmax=75°時得到的,下面通過改變虎克鉸和球鉸最大轉角來分析轉動副轉角對工作空間的影響。表4給出了該機床結構參數取以上優化值且動平臺姿態歐拉角為[0 0 0]時虎克鉸和球鉸最大轉角取不同值的工作空間。表5和表6分別給出了該機床結構參數取以上優化值且動平臺姿態歐拉角為[10° 10° 10°]時虎克鉸和球鉸最大轉角取不同值的工作空間。這里工作空間是指滿足3個約束條件的所有位姿點的總和,而實際能得到的規則內接幾何形體要小得多。 表4 工作空間隨虎克鉸和球鉸最大轉角的變化 表5 工作空間隨虎克鉸最大轉角的變化 表6 工作空間隨球鉸最大轉角的變化 由表4~表6可以發現:當動平臺只做平移運動,虎克鉸和球鉸最大轉角均大于65°時,工作空間不會受轉動副轉角限制而減小;當動平臺既平移又轉動時,球鉸轉角范圍比虎克鉸轉角范圍對工作空間的影響要大;如果動平臺姿態變化,則工作空間也將隨之改變,且動平臺姿態角越大,其工作空間就越小。有效增加虎克鉸和球鉸轉角范圍對于擴大并聯機床工作空間能起到關鍵作用。 (1)本文求解了BJ-04-02(A)型交叉桿并聯機床在約束條件下的工作空間并探究了有效增加關節轉動副轉角范圍和適當改變驅動桿長度對擴大并聯機床工作空間起到的關鍵作用,而桿件尺寸干涉的可能性很小。 (2)采用自然坐標法推導了交叉桿并聯機床量綱一致性的新型雅可比矩陣,并得到了該機床工作空間內的全域靈巧度指數分布。 (3)研究了交叉桿并聯機床的各機構參數對其工作空間和靈巧度的影響規律。以增大機床工作空間和提高機床靈巧度為目標,對機床結構參數進行了優化設計并給出了該機床優化前后的工作空間所包含的最大圓柱體大小。 [1]黃真,趙永生,趙鐵石.高等空間機構學[M].北京:高等教育出版社,2006. [2]MasoryO,WangJ.WorkspaceEvaluationofStewartPlatforms[J].AdvancedRobotics,1995,9(4):443-461. [3]陳小崗,孫宇,劉遠偉,等.6-UPS并聯機床位姿空間圖譜[J].中國機械工程,2013,24(10):1331-1335. ChenXiaogang,SunYu,LiuYuanwei,etal.PositionandOrientationWorkspaceAtlasofa6-UPSParallelMachineTool[J].ChinaMechanicalEngineering,2013,24(10):1331-1335. [4]MonsarratB,GosselinCM.WorkspaceAnalysisandOptimalDesignofa3-leg6-DOFParallelPlatformMechanism[J].IEEETransactionsonRoboticsandAutomation,2003,19(6):954-966. [5]楊曉鈞,王知行,鐘詩勝.基于工作空間和靈活性的并聯機床結構參數優化設計[J].機械與電子,2004(2):14-17. YangXiaojun,WangZhixing,ZhongShisheng.ParameterOptimalDesignoftheParallelMachineToolforWorkspaceandDexterity[J].Machinery&Electronics,2004(2):14-17. [6]曹永剛,張玉茹,馬運忠.6-RSS型并聯機構的工作空間分析與參數優化[J].機械工程學報,2008,44(1):19-24. CaoYonggang,ZhangYuru,MaYunzhong.WorkspaceAnalysisandParameterOptimizationof6-RSSParallelMechanism[J].ChineseJournalofMechanicalEngineering, 2008,44(1):19-24.[7]GosselinC.DexterityIndicesforPlanarandSpatialRoboticManipulators[C]//Proc.IEEEInt.Conf.RoboticsandAutomation.Cincinnati,1990:650-655.[8]GosselinC,AngelesJ.AGlobalPerformanceIndexfortheKinematicOptimizationofRoboticManipulators[J].ASMEJournalofMechanicalDesign,1991,113(3):220-226. [9]于靖軍,劉辛軍,丁希倫,等.機器人機構學的數學基礎[M].北京:機械工業出版社,2008. (編輯陳勇) Structural Parameter Optimization of a Crossbar Parallel Machine Tool Fang Xifeng1Zhang Sichong1Xu Qinhuan1Wang Tongyue2Liu Yuanwei2Chen Xiaogang2 1.Jiangsu University of Science and Technology,Zhenjiang,Jiangsu,212003 2.Huaiyin Institute of Technology,Huaian,Jiangsu,223001 Increasing workspace and improving dexterity are important taskes for the design of parallel machine tool. On the basis of inverse kinematics, workspace of the crossbar parallel machine tool with constraints was obtained via three-dimensional search method. New Jacobian matrix of the machine was also deduced by using the natural coordinate method. Dexterity distribution of the machine was acquired as well based on the workspace and new Jacobian matrix. Then, the impacts of structural parameters on workspace and global dexterity index were analyzed, then least square method was applied to curve fitting and the optimization of these structural parameters were carried out by introducing workspace value index and global dexterity index as the global optimization goals. Compared with the original data, each of them increases by 0.40 and 0.26 times respectively, achieving the aim of mechanism optimization. crossbar parallel machine tool;workspace;new Jacobian matrix;global dexterity index;structural parameter optimization 2013-08-28 江蘇省高校自然科學基金資助項目(09KJB460003);江蘇省數字化制造技術重點實驗室開放基金資助項目(HGDML-1102);江蘇省船舶先進設計制造技術重點實驗室開放基金資助項目(CJ1201) TH112;TH122< class="emphasis_italic">DOI :10.3969/j.issn.1004-132X.2015.01.007 方喜峰,男,1971年生。江蘇科技大學機械工程學院教授、博士(后)。主要研究方向為智能設計與制造、數控加工技術等。發表論文40余篇,獲省級科技進步獎3項。張思崇,男,1990年生。江蘇科技大學機械工程學院碩士研究生。許欽桓,男,1990年生。江蘇科技大學機械工程學院碩士研究生。汪通悅,男,1969年生。淮陰工學院江蘇省數字化制造技術重點實驗室教授、博士。劉遠偉,男,1954年生。淮陰工學院江蘇省數字化制造技術重點實驗室教授。陳小崗,男,1981年生。淮陰工學院江蘇省數字化制造技術重點實驗室講師、博士研究生。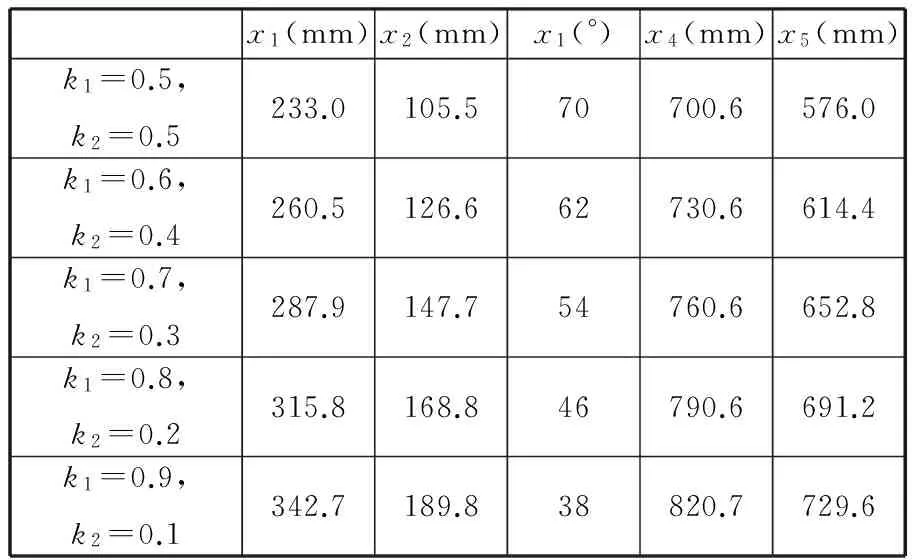




5 結論
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45