十七元十字陣水下合作目標(biāo)遠(yuǎn)程定位方法
2015-10-28 12:25:09李帥張俊徐國(guó)貴
應(yīng)用聲學(xué) 2015年2期
關(guān)鍵詞:信號(hào)
李帥 張俊 徐國(guó)貴
(中國(guó)人民解放軍91388部隊(duì) 湛江 524022)
十七元十字陣水下合作目標(biāo)遠(yuǎn)程定位方法
李帥?張俊徐國(guó)貴
(中國(guó)人民解放軍91388部隊(duì)湛江524022)
結(jié)合水聲對(duì)抗的實(shí)際需求,針對(duì)海洋環(huán)境下目標(biāo)定位困難且定位距離有限的問題,利用多水聽器十字陣接收信號(hào),并對(duì)信號(hào)進(jìn)行加權(quán)來提高接收信號(hào)信噪比,以達(dá)到定位水下合作目標(biāo)的目的。具體通過波束形成和信號(hào)相關(guān),依據(jù)目標(biāo)方位與波束形成方位一致時(shí)能量最大的原則,實(shí)現(xiàn)對(duì)遠(yuǎn)距離水下合作目標(biāo)方位和距離的估計(jì),并通過仿真和試驗(yàn)驗(yàn)證了所提定位方法的有效性。
十字陣,波束形成,遠(yuǎn)程定位
1 引言
水聲對(duì)抗需要分析并掌握目標(biāo)運(yùn)動(dòng)態(tài)勢(shì)[1-2],但復(fù)雜水聲環(huán)境下目標(biāo)定位存在一定困難,定位距離有限。傳感器陣列與波束形成技術(shù)結(jié)合因其具有靈活的波束控制、高信號(hào)增益、較好的干擾抑制能力與空間分辨能力[3]等優(yōu)點(diǎn)而在艦船目標(biāo)探測(cè)、水聲對(duì)抗、故障檢測(cè)等領(lǐng)域[4]獲得廣泛應(yīng)用,一般用于聲源定位的陣列有矩形陣、十字陣、環(huán)形陣、螺旋陣[3-6]等幾種陣形,其中十字陣因其陣形冗余度較小、盲區(qū)較小且具有分維特性[4,7-8]而較為適合聲源遠(yuǎn)距離定位。
近年來發(fā)表了一系列較少陣元陣列定位的理論和實(shí)驗(yàn)研究[4-8];本文在分析十字陣定位原理的基礎(chǔ)上,針對(duì)水聲對(duì)抗中遇到的實(shí)際問題,重點(diǎn)探索陣元數(shù)顯著增加情況下十字陣的水聲定位效果,實(shí)際應(yīng)用十七元水聽器十字陣進(jìn)行較遠(yuǎn)距離目標(biāo)(合作聲信號(hào)目標(biāo))定位方法的探索,并在南海海域進(jìn)行實(shí)際的海上試驗(yàn)驗(yàn)證。
2 算法原理與流程
圖1為水平布置十字陣結(jié)構(gòu)示意圖,圖中ai、bi(i=0,1,2,···,8)為水聽器陣元,d1、d2(d1>d2)分別為長(zhǎng)軸和短軸陣元間距,T為目標(biāo)聲源,其相對(duì)于陣元中心方位角為θ;該十字陣由17個(gè)聲壓水聽器組成,實(shí)際應(yīng)用中將十字陣換能器接收到的17路信號(hào)在360°水平方向按δ°間隔形成n個(gè)波束,并進(jìn)行目標(biāo)跟蹤,通過接收信號(hào)的加權(quán),依據(jù)目標(biāo)方位與波束形成方位一致時(shí)能量最大的原則,實(shí)現(xiàn)對(duì)遠(yuǎn)距離目標(biāo)方位及距離的估計(jì),其算法框圖如圖2所示。波束形成具體方法為:如圖1所示,設(shè)要在θ角方位上形成波束,聲速為c,以十字陣中基元a4(b4)為參考基元,基元ai(i=0,1,2,···,8,i≠4)相對(duì)于參考基元的時(shí)延為τi,基元bj(j=0,1,2,···,8,j≠4)相對(duì)于參考基元的時(shí)延為ηj,則有[3]
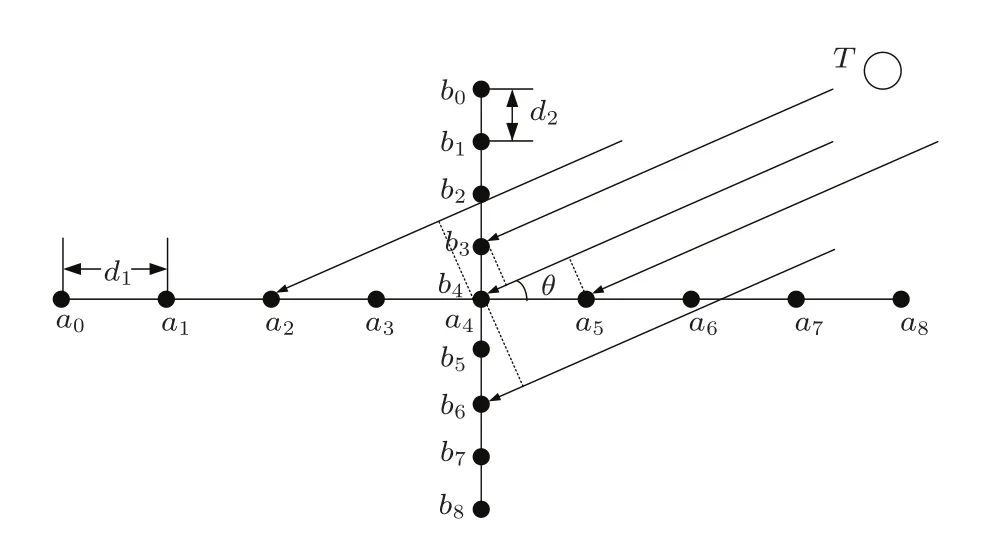
圖1 十字陣結(jié)構(gòu)示意圖Fig.1 Structure diagram of the cross array

圖2 十字陣信號(hào)處理框圖Fig.2 The block diagram of signal processing

設(shè)十字陣長(zhǎng)臂第i路信號(hào)為ai(k),加權(quán)系數(shù)為wi,短臂第j路信號(hào)為bj(k),加權(quán)系數(shù)為vi,采用延時(shí)相加波束形成,則第m個(gè)波束的輸出為


圖3 十字陣波束形成算法流程圖Fig.3 Flowchart of the beamforming
則y(k)=max(ym(k))(m=1,2,3,···,n)時(shí)所對(duì)應(yīng)的θ(k)即為目標(biāo)方位角序列,最后將y(k)與參考合作聲信號(hào)做相關(guān),并根據(jù)時(shí)間統(tǒng)一設(shè)備所提供的發(fā)射與接收同步時(shí)間(同步脈沖)得到對(duì)應(yīng)的相關(guān)峰時(shí)延,再與聲速相乘即可得出距離估計(jì)序列,從而實(shí)現(xiàn)對(duì)目標(biāo)的定位。
3 仿真計(jì)算與分析
如圖4所示,設(shè)定十字陣中心點(diǎn)為坐標(biāo)0點(diǎn),十字陣各單元如圖1所示,以短軸為水平軸,水聽器間距為0.1 m,長(zhǎng)軸為豎軸,水聽器間距為0.2 m,以b8號(hào)水聽器為正北方向,目標(biāo)在十字陣北偏東45°方向,與十字陣距離為1414 m,聲速設(shè)為1530 m/s,接收信號(hào)信噪比為10 dB。目標(biāo)發(fā)射7 kHz正弦調(diào)制的Gold序列信號(hào),通過信道函數(shù)仿真計(jì)算出十字陣17個(gè)單元接收到的信號(hào)。以正西方向?yàn)?°,順時(shí)針方向進(jìn)行波束掃描,每2°一個(gè)波束,如圖5所示,通過常規(guī)波束形成,可以計(jì)算出目標(biāo)與正西方向夾角為:69×2=138°。

圖4 仿真條件示意圖Fig.4 Schematic of the simulation conditions

圖5 波束掃描Fig.5 Result of the beamforming

圖6 單水聽器接收信號(hào)與波束形成后信號(hào)對(duì)比Fig.6 Comparision of received signals between single hydrophone and array output

圖7 單水聽器拷貝相關(guān)與波束形成后拷貝相關(guān)對(duì)比Fig.7 Comparision of signal-correlation between single hydrophone and array output
圖6為單個(gè)水聽器接收到的信號(hào)與十字陣常規(guī)波束形成后的信號(hào)對(duì)比圖,圖7為單水聽器信號(hào)拷貝相關(guān)與波束形成后信號(hào)拷貝相關(guān)歸一化對(duì)比圖,圖8為十字陣處理增益圖。從上述圖中可以看出,波束形成后的信號(hào)能量明顯大于單水聽器信號(hào)能量,且由于各水聽器接收噪聲信號(hào)相關(guān)性小,波束形成后的輸出信號(hào)信噪比顯著增強(qiáng),接收信噪比-10 dB到10 dB時(shí),陣處理增益可以提高12 dB左右。

圖8 十字陣處理的增益Fig.8 Processing gain of the cross array
4 試驗(yàn)驗(yàn)證及分析
試驗(yàn)海區(qū)水深106 m,試驗(yàn)由兩艘船聯(lián)合作業(yè)來完成,一艘為聲源母船,另一艘為十字陣母船,十字陣母船停機(jī)漂泊,在船舷吊放十字陣,吊放深度約30 m,聲源母船位于十字陣吊放側(cè)約15 km處,以十字陣坐標(biāo)為基準(zhǔn)約120°方向,停機(jī)漂泊,聲源吊放深度約20 m,采用193 dB源級(jí)發(fā)射7 kHz正弦調(diào)制的Gold序列信號(hào),其中海流等造成的十字陣姿態(tài)變化由十字陣內(nèi)置羅經(jīng)進(jìn)行校正。在試驗(yàn)海區(qū)共測(cè)得聲速剖面4條,如圖9所示,1至4對(duì)應(yīng)的測(cè)量時(shí)間分別為09:18、12:35、16:45、18:58。從圖9可以看出,第1條剖面為強(qiáng)負(fù)梯度剖面,第2~4條在20 m至30 m水層內(nèi)均出現(xiàn)了較強(qiáng)的躍變層,躍層厚度從5 m至10 m不等,且表層負(fù)梯度明顯加強(qiáng),梯度最高達(dá)到0.64,水文條件判斷為惡劣水文條件。數(shù)據(jù)處理時(shí),本文暫不探討非均勻聲速剖面時(shí)的聲速校正問題,計(jì)算中根據(jù)實(shí)驗(yàn)設(shè)備布放深度及水文數(shù)據(jù)取聲速為1530 m/s,實(shí)測(cè)數(shù)據(jù)按上文所設(shè)計(jì)的處理方法進(jìn)行波束形成及相關(guān)處理,即可實(shí)現(xiàn)對(duì)目標(biāo)的定位,圖10即為實(shí)測(cè)數(shù)據(jù)處理結(jié)果。由結(jié)果可以看出,十字陣測(cè)距效果較好,與GPS實(shí)測(cè)數(shù)據(jù)相對(duì)比誤差低于2%,而測(cè)向誤差則大于10°,效果一般。考慮到將來可用3個(gè)或3個(gè)以上十字陣的測(cè)距結(jié)果進(jìn)行球面交匯實(shí)現(xiàn)目標(biāo)定位,而球面交匯解算不需知道單個(gè)陣的定位方位,只有接收到信號(hào)的十字陣小于3個(gè)時(shí),單個(gè)十字陣定位方位才真正有價(jià)值,其他時(shí)候僅供參考,因而定位效果總體來說還是具有一定的參考價(jià)值。

圖9 聲速剖面Fig.9 Sound speed profile

圖10 實(shí)測(cè)目標(biāo)定位結(jié)果Fig.10 Positioning results of the target
5 結(jié)論
本文通過仿真及試驗(yàn)驗(yàn)證,驗(yàn)證了多水聽器十字陣遠(yuǎn)程合作目標(biāo)定位方法的有效性,雖然測(cè)向誤差較大,但測(cè)距效果良好,考慮到海洋環(huán)境的復(fù)雜性等一些自然因素的影響,以及海上試驗(yàn)實(shí)施方法、十字陣孔徑、數(shù)據(jù)處理方法等方面可能存在的不足及局限性,該方法還有較大的研究空間,如水文條件與吊放深度的關(guān)系、十字陣孔徑的最優(yōu)化、非均勻聲速剖面時(shí)的聲速校正及聲速選擇方式的改善、數(shù)據(jù)處理方法的改進(jìn)等,這些方面的研究都有望進(jìn)一步提高十字陣的定位精度。同時(shí),該方法還具有較好的應(yīng)用前景,如可采用多十字陣定位的方式(采用球面交匯法解算),既能發(fā)揮該方法良好的遠(yuǎn)程測(cè)距功能,又可以克服測(cè)向誤差較大的不足,從而實(shí)現(xiàn)對(duì)較大區(qū)域內(nèi)水下目標(biāo)定位監(jiān)控,提升水聲對(duì)抗能力。
[1]施丹華.水聲對(duì)抗技術(shù)發(fā)展及其概念拓展[J].艦船電子工程,2004,(1):1-3. SHI Danhua.Progress of underwater acoustic warfare technology and its conceptual extension[J].Ship Electronic Engineering,2004,(1):1-3.
[2]黃玉林,張俊,張學(xué)峰,等.潛艇水下定位合作聲信號(hào)的低截獲性分析[J].應(yīng)用科技,2012,(5):45-47. HUANG Yulin,ZHANG Jun,ZHANG Xuefeng,et al. Low probability of interception analysis on cooperative acoustic signals in submarine underwater localization[J]. Applied Science and Technology,2012,(5):45-47.
[3]王永良,丁前軍,李榮峰.自適應(yīng)陣列處理[M].北京:清華大學(xué)出版社,2009.
[4]黃高明,金連友,李志軼.一種新穎的聲源被動(dòng)定位技術(shù)研究[J].電子對(duì)抗,2009,(2):1-5. HUANG Gaoming,JIN Lianyou,LI Zhiyi.Research of a novel acoustic source passive location technique[J].Electronic Warfare,2009,(2):1-5.
[5]林志斌,徐柏齡.基于傳聲器陣列的聲源定位[J].電聲技術(shù),2004,(5):19-23. LIN Zhibin,XU Boling.Sound source localization based on microphone array[J].Audio Engineering,2004,(5):19-23.
[6]陳華偉,趙俊渭,郭業(yè)才.五元十字陣被動(dòng)定位算法及其性能研究[J].探測(cè)與控制學(xué)報(bào),2003,25(4):11-16. CHEN Huawei,ZHAO Junwei,GUO Yecai.Acoustic passive localization algorithm based on a planar five-element array and its performance analysis[J].Journal of Detection&Control,2003,25(4):11-16.
[7]程萍,陳建峰,馬馳,等.十字陣短時(shí)寬帶聲源實(shí)時(shí)定向算法[J],應(yīng)用聲學(xué),2012,31(2):123-129. CHENG Ping,CHEN Jianfeng,MA Chi,et al.A fast short-time broadband acoustic source direction estimation algorithm using cross array[J].Applied Acoustics,2012,31(2):123-129.
[8]魏麗萍,陳巖,陳庚,等.不等間距非直線三元陣在水聲平面聲源被動(dòng)定位中的應(yīng)用[J],應(yīng)用聲學(xué),2009,28(6):447-453. WEI Liping,CHEN Yan,CHEN Geng,et al.Application of unequally-spaced and non-linear three-hydrophone array in underwater acoustic coplanar target passive localization[J].Applied Acoustics,2009,28(6):447-453.
A remote positioning method of underwater cooperative targets for seventeen-hydrophone cross array
LI ShuaiZHANG JunXU Guogui
(No.91388 Troop of the Chinese People's Liberation Army,Zhanjiang 524022,China)
Taking into account the difficulty of localization and its limited distance in marine environment,a seventeen-hydrophone cross array,which can improve the signal noise ratio of received signals by weighting all the channels,is designed to estimate the position of the underwater cooperative target.According to the principle of maximum energy when the orientation of target and beamforming is consistent,the target position is estimated by beamforming and signal-correlation.Finally,some simulation results and analysis of the method as well as experiment results are presented to verify the validity of the method.
Cross array,Beamforming,Remote position
TB533
A
1000-310X(2015)02-0148-05
10.11684/j.issn.1000-310X.2015.02.009
2014-03-25收稿;2014-10-05定稿
李帥(1986-),男,河南南陽人,碩士,研究方向:信號(hào)與信息處理。
E-mail:litianshuai@126.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06