基于智能控制技術的家居系統的研究
2015-10-28 09:02:30夏華鳳劉艷君徐雪藝丁恩宇吳韻呂煜坤
電視技術 2015年10期
夏華鳳,劉艷君,徐雪藝,丁恩宇,吳韻,呂煜坤
(1.泰州學院機電工程學院,江蘇泰州225300;2.江南大學控制科學與工程研究中心,江蘇無錫214122)
基于智能控制技術的家居系統的研究
夏華鳳1,劉艷君2,徐雪藝1,丁恩宇1,吳韻1,呂煜坤1
(1.泰州學院機電工程學院,江蘇泰州225300;2.江南大學控制科學與工程研究中心,江蘇無錫214122)
家居系統是一個復雜的多變量系統,具有非線性時變及變量之間動態耦合,不易建立精確的數學方程,將PLC控制技術和基于平均速度的粒子群優化模糊PID算法相結合,通過電力載波線組網,采用組態技術,實現家居智能控制。實驗表明,該系統能夠根據環境變化實時動態地開窗通風、啟動窗簾調光及開啟空調調溫等,使家居溫度穩定,環境舒適,而且界面簡單易操作,方便在線修改,推廣價值良好。
家居智能;平均速度;粒子群算法;模糊PID;PLC
【本文獻信息】夏華鳳,劉艷君,徐雪藝,等.基于智能控制技術的家居系統的研究[J].電視技術,2015,39(10).
智能家居是一個能提供不同功能的建筑實體,通過信息通信技術使其內部一系列的產品和服務具有互操作性而實現其附加功能[1]。無線網絡、現場總線及電力線是目前用于家居網絡的主要技術。無線組網技術具有節省布線、方便設備安裝、輕松分離強弱電等優點,在智能家居系統中發展迅猛,家居網絡使用ZigBee、藍牙、Z-wave、WiFi等。現場總線組網技術比較成熟,在家居網絡中運用比較廣泛,家居網絡中使用RS-485、SCS-BUS及CAN總線等總線技術。無線技術組網存在頻譜干擾和信號穿墻衰減等缺點,總線組網需要重新敷設線纜,難免需要穿墻打洞。而電力線組網則無需布線,且永久在線[2]。本文提出以電力載波線組網的家居智能控制,充分利用已有的設施,避免破壞建筑物和設施,大大節約資源。由于PLC可靠的運行、易于操作、便于開發,選用PLC結合智能控制技術使家居系統能夠根據環境變化實時動態地通過開窗通風、啟動窗簾調光及開啟空調調溫等,使家居溫度穩定,環境舒適;利用組態觸摸屏的可視化界面,方便操作,支持在線修改,是未來家居智能化的發展方向。
1 系統總體框架
1.1系統結構圖
本文設計的家居控制系統布局如圖1所示[3]。電力線完成家居內部組網,通過RS-232接口與上位機通信,內網通過家庭網關接入互聯網,遠程終端可以通過訪問PC機上的組態畫面對家居內部進行遠程監控。

圖1 系統布局圖
1.2系統主要功能說明
每一個子系統通過RS-232接口掛接在電力線上,完成相互間的通信。照明系統分為可調光燈具和不可調光燈具。家電分為信息家電[4]、普通家電和紅外家電,普通家電通過加接智能插座,紅外家電通過紅外轉發器,從而和信息家電一樣進行簡單開關量處理(空調除外)。PLC結合基于平均速度的粒子群優化模糊PID算法,協同照明系統、視頻系統、安防系統及部分家電動作,實現對溫度、濕度和光照度等的處理,從而實現家居智能控制。
2 家居智能控制的數據處理
2.1簡單開關量的處理
該系統有許多簡單開關量(電視機、洗衣機、門、窗、燈、飲水機、閥門等),PLC對這些開關量的處理通過簡單的編程就可以實現。
2.2家居環境系統的處理
家居系統是一個復雜的系統,影響環境溫濕度、空氣質量和光照度等的因素很多,而且這些量之間是相互影響的,比如遮陽時溫度會降低,溫度過高時采取降溫措施濕度會升高,加大濕度時溫度又會變化,對這些物理量采取經典的PID控制,效果不甚理想。本文采用將模糊PID控制和粒子群優化算法相結合實現對這些量的控制,不僅具有直接PID控制的簡單、精度高的優點,同時具有較強的適應性和魯棒性,搜索速度快,從而達到理想的效果。
2.2.1家居環境控制系統結構圖
家居環境的溫濕度、空氣質量和光照度控制系統結構如圖2所示。各類傳感器實測數據通過調整送到模糊PID控制器,PLC根據模糊PID控制器優化后的參數kp,ki,kd產生的決策信號使驅動部件(加熱器、加濕器、除濕器、冰箱、窗戶、窗簾、排氣風扇、燈)動作,確保房間溫度、濕度及光照度等波動在誤差范圍內。
2.2.2基于平均速度的粒子群優化模糊PID控制器設計
模糊控制器一般由3個部分組成,即模糊化處理、模糊推理和清晰化處理。取系統的誤差值E和誤差變化率EC為模糊控制器的2個輸入,在其論域上定義語言子集[NB、NM、NS、ZO、PS、PM、PB],選三角形隸屬度函數來進行模糊化。粒子群算法對模糊PID控制器中的誤差量化因子kE、誤差變化量化因子kEC、PID控制量的比例因子kup、kui、kud這5個參數進行尋優。粒子群優化模糊PID控制器設計如圖3所示[5]。
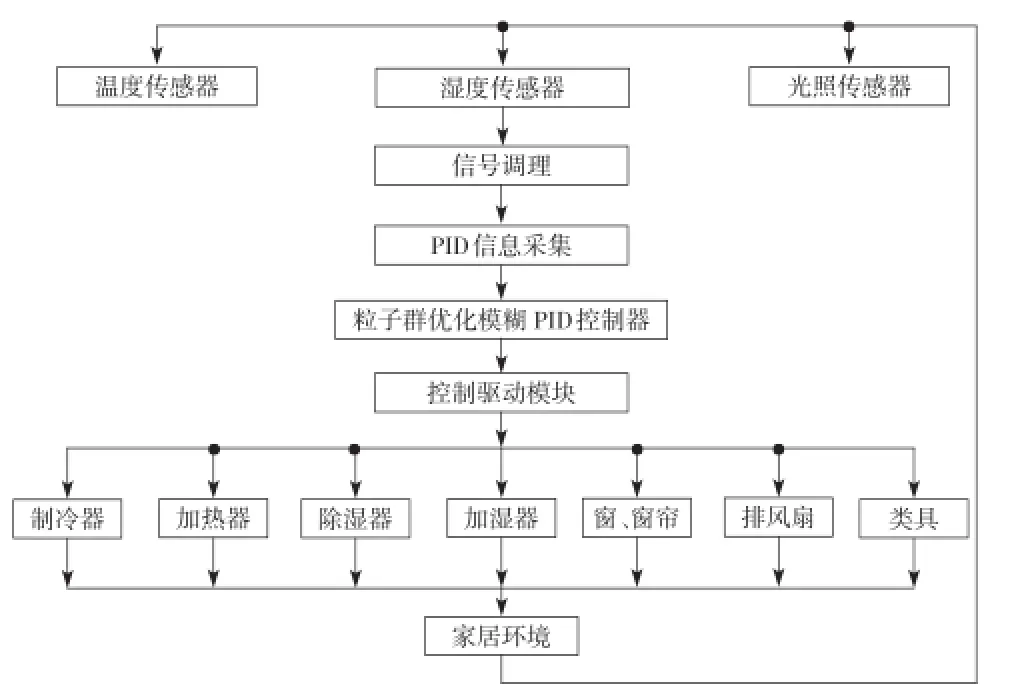
圖2 溫、濕度、光照度控制系統結構圖
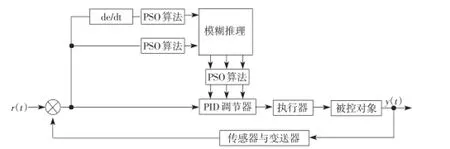
圖3 粒子群優化模糊PID控制器框圖
2.2.3模糊PID控制器設計[6]
以溫度控制為例,房間溫度以25°為宜。實際溫度比設定值高很多,且保持持續上升趨勢,此時需要開啟降溫設施;實際溫度跟設定值相差不多,但仍在上升時,此時打開門窗即可。
PID控制根據參考值r(t)與實際輸出值y(t)構成系統偏差e(t)控制,即e(t)=r(t)-y(t),對偏差進行比例、積分和微分求和,得到輸出量u(t)。PID控制器的數學表達式為

式中:kp為比例參數;Ti為積分參數;Td為微分參數。傳遞函數為


經過分析,建立家居環境系統室溫和室溫控制設備的數學方程[7],表達式分別為
在PID控制中,kp,ki和kd決定了其性能品質,所以,優化這3個參數意義重大。本文按照階躍響應分段圖各個參數的作用(如圖4)建立模糊控制規則庫。
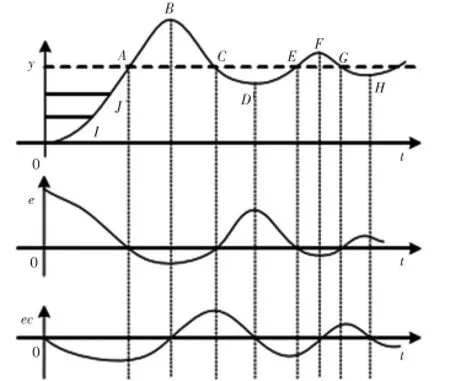
圖4系統響應的曲線圖
根據操作者調整kp,ki,kd的規則和專家經驗,總結出系統輸入E,EC與輸出kp,ki,kd的模糊控制規則表,如表1~表3所示。
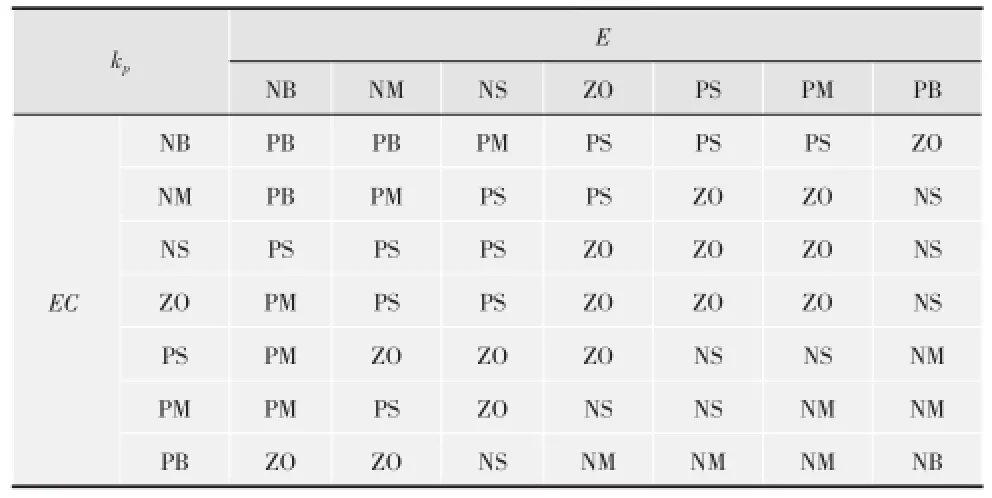
表1kp模糊規則表
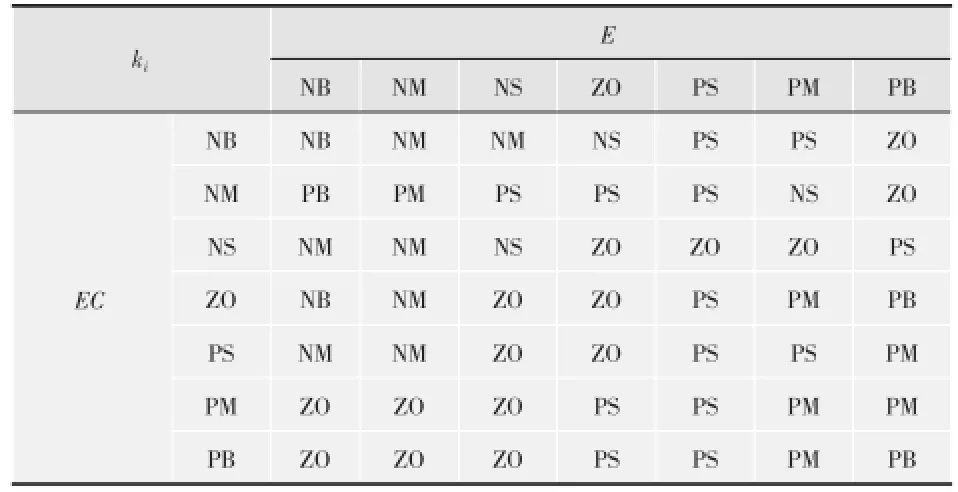
表2ki模糊規則表
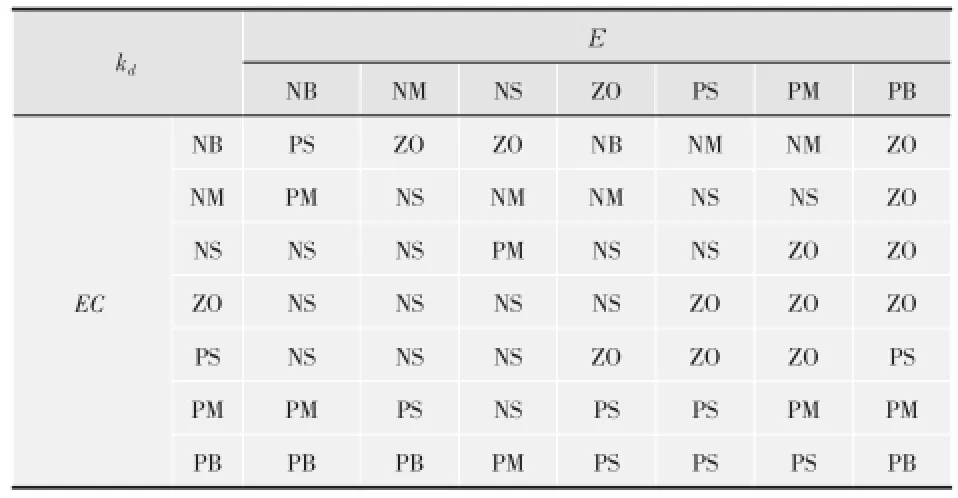
表3kd模糊規則表
模糊規則1:
if E=NB and EC=NB then kp=PB and ki=NB and kd=PS即如果溫度誤差是負大,溫度誤差的變化率也是負大,那kp是正大,ki是負大,kd是正小。系統實測值與給定參考值相比偏差較大,且偏差有繼續增大趨勢,需要通過加大比例系數來提高響應的速度,同時減小積分系數,防止超調增大,使微分系數增加少許,以抑制超調。
2.2.4基于平均速度的粒子群算法

PID參數的優化是通過算法來使kp,ki,kd這3個參數優化,即是基于一定的適度函數參數的尋優,本文選用能體現系統調節質量的ITAE指標作適度函數,定義為
式中:||e(t)是絕對誤差。
粒子在搜索空間中,其速度和位置根據式(6)、式(7)來決定
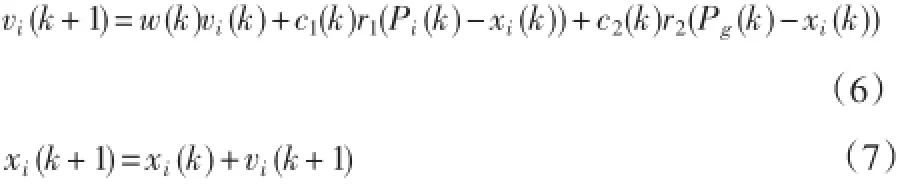
式中:xi(k)是微粒的位子;vi(k)是微粒的速度;w(k)是微粒的慣性權重;c1(k)、c2(k)為加速度值;r1、r2是[0,1]間的任意數;Pi(k)是到目前為止微粒搜索到的最佳位子;Pg(k)是到目前為止全部微粒群所能搜索的最佳位子。采用粒子群的平均速度指標[8]來衡量粒子群的收斂速度,粒子群的平均速度定義為

式中:D是每一個粒子的維數;N是總的粒子個數;vij(k)是第i個粒子在第j維上的速度分量。函數適度值的增減決定了粒子群的平均速度的增減。平均速度用以表征粒子群系統活躍的水平,即收斂狀況。基于平均速度信息的粒子群慣性系數調節公式為



即跟隨平均速度值的減小,加速因子c1(k)逐步變小,c2(k)逐步變大,C為一常數值。
2.2.5參數優化的PSO算法的實現過程
利用基于平均速度的粒子群算法對kE,kEC,kup,kui及kud5個參數進行尋優,尋優向量X={kE,kEC,kup,kui,kud},迭代總數設為N=300,當前迭代次數為k,PSO的流程如圖5所示。
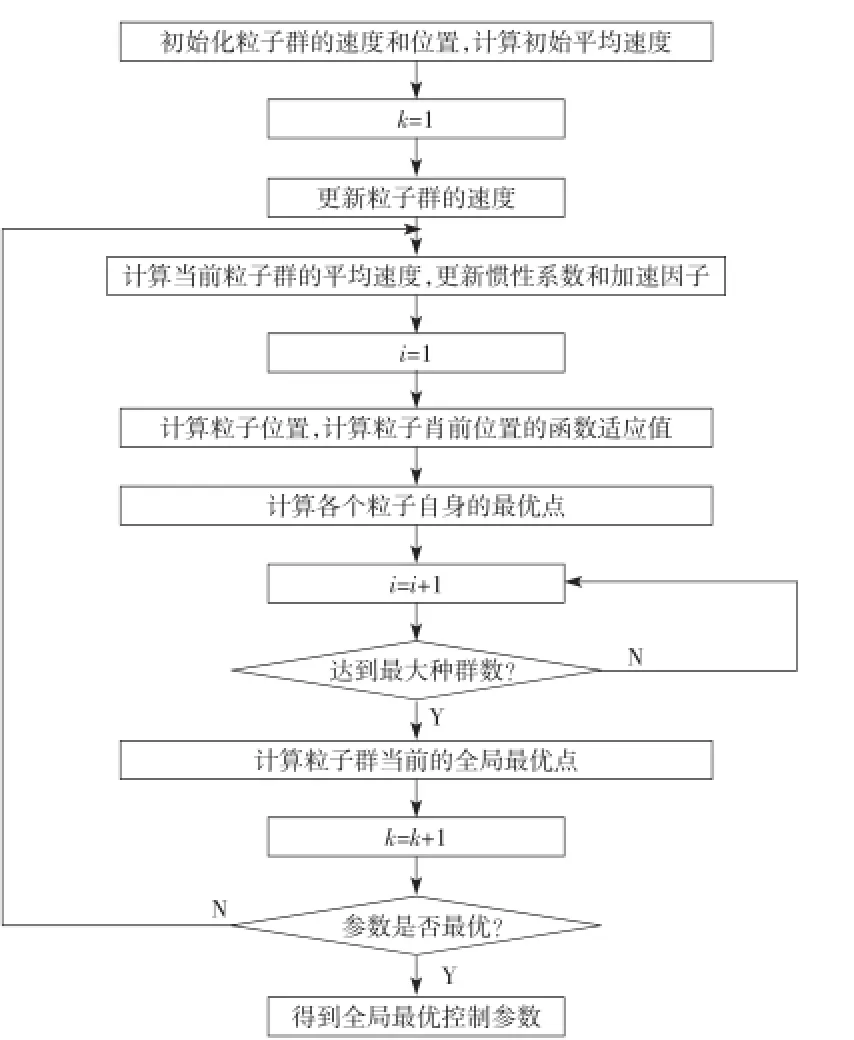
圖5 粒子群算法優化流程圖
2.2.6采用MATLAB仿真的結果
初始PID參數設為kp0=0.16,ki0=0.001 48,kd0=0.5,經模糊推理機得模糊輸入量化因子kE=1.6,kEC=1,控制量比例因子kup=0.006,kui=0.01,kud=0.5,編寫尋優程序的m文件,通過sim命令調用在Simulink界面建立的仿真模型計算粒子群的適應度。得到尋優后的仿真結果如圖6所示。
仿真結果顯示,采用基于平均速度的粒子群算法優化模糊PID控制器的輸出參數,系統響應快,超調小、調節時間短,可以使室溫穩定在設定值25℃。
3 結語
應用PLC作為核心控制器,系統功能可以根據實際情況進行擴展,比如,需要對老人進行照顧,可以考慮在老人特定部位安裝傳感器[9],在門、馬桶、洗臉池某個位置安裝壓力傳感器[9]等,方便了解情況。利用已經鋪設的電力線增設傳感器不會影響房屋的整體觀感。將PLC與智能控制理論相結合,可以使家居環境不僅方便,而且舒適,真正實現智能化,從而有力推動家居智能化的發展與普及。
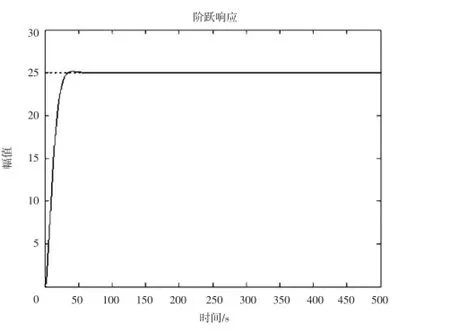
圖6 尋優后的仿真圖形
[1]ALEXANDER P.Technological paradigms and complex technical systems--the case of smart homes[J].Research Policy,2008(37):508-529.
[2]唐義權.基于PLC的智能家居網絡研究[D].寧波:寧波大學,2012.
[3]彭建盛.基于Symbian平臺智能家居控制系統的設計與實現[J].天津師范大學學報:自然科學版,2011,31(2):55-58.
[4]汪宇,呂衛,楊博菲,等.基于Android平臺的智能家居監控系統[J].電視技術,2012,36(2):36-38.
[5]唐鑫,左為恒,李昌春.中央空調房間溫度智能PID控制的仿真研究[J].計算機仿真,2010,27(5):140-144.
[6]陳云霞,姚舜.電子束快速成型溫度自適應模糊PID控制系統[J].控制工程,2009,16(1):56-69.
[7]曹建秋,徐凱.遺傳算法優化的模糊+變論域自適應模糊PID復合控制策略[J].信息與控制,2011,40(1):44-60.
[8]高哲,廖曉鐘.基于平均速度的混合自適應粒子群算法[J].控制與決策,2012,27(1):152-160.
[9]DING D,COOPER R A,PASQUINA P F,LAVINIA F P.Sensor technology for smart homes[J].Maturitas,2011(69):131-136.
Study of Home System Based on Intelligent Control Technology
XIA Huafeng1,LIU Yanjun2,XU Xueyi1,DING Enyu1,WU Yun1,Lü Yukun1
(1.College of Electromechanical Engineering,Taizhou University,Jiangsu Taizhou 225300,China;2.Control Science and Engineering Research Center,Jiangnan University,Jiangsu Wuxi 214122,China)
Home system is a complex multivariable system.It is nonlinear and time-varying.And dynamic coupling relationship exits among variables.It is hard to found accurate system equations.PLC control technology joining with particle swarm optimization(PSO)based on average velocity fuzzy PID algorithm has taken in the paper,power line carrier has adopted as networking technique,and configuration technology has used to force home intelligent control. Experiments show that the household temperature acts stably and the environment feels comfortable through actions like dynamically window ventilated,curtain dimmer started and air-conditioning opened according to the real-time environment.Moreover configuration interface operation is easy,and online modification is convenient.Therefore it owns a good popularization value.
home intelligent control;average velocity;PSO algorithm;fuzzy PID;PLC
TP273
A
10.16280/j.videoe.2015.10.008
夏華鳳(1981—),女,講師,碩士,主要研究方向為控制理論與控制工程;
時雯
2014-07-04
江蘇省實踐創新項目(201412917024X)
劉艷君(1983—),女,副教授,博士,主要研究方向為系統辨識理論與方法等。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
