一種基于強度補償的自由式光纖束差壓傳感器
2015-10-29 02:27:49鐘麗瓊張大斌
中國機械工程 2015年2期
關鍵詞:檢測
胡 浩 鐘麗瓊,2 張大斌
1.貴州大學,貴陽,550025 2.貴陽學院,貴陽,550003
一種基于強度補償的自由式光纖束差壓傳感器
胡浩1鐘麗瓊1,2張大斌1
1.貴州大學,貴陽,5500252.貴陽學院,貴陽,550003
對一種基于強度補償的自由式光纖束差壓傳感器進行設計與研究。傳感器探頭部分采用同結構、雙探頭的設計,傳感器探頭采用機械式封裝;對傳感器的光纖部分進行了強度補償設計與分析,并利用調制函數M,理論分析了補償后的輸出值R;在對兩傳感探頭施加相等的壓力p=20kPa情況下,改變光源的輸出功率,測出光電探測器的輸出電壓值,并在兩探頭存在不同的壓差Δp時,測出其輸出值R。實驗結果表明:通過強度補償后,輸出值R≈1,同時在不同的壓差作用下,輸出值R與壓差Δp在一段區(qū)域內有較好的線性關系。研究結果表明:傳感器的強度補償效果明顯,可實現壓力差值的檢測。
強度補償;自由式;光纖束;差壓傳感器
0 引言
差壓傳感器廣泛應用于微流量測量、泄漏測試、潔凈間監(jiān)測、環(huán)境密封性檢測、氣體流量測量、液位高低測量等高精度測量場合的壓差檢測。目前國內外對差壓傳感器的研究主要集中于傳統的壓阻式差壓傳感器與電容式差壓傳感器[1-4]。由于傳統差壓傳感器存在不足,國內外學者開始對一些新型的差壓傳感器進行研究。
光纖傳感技術具有很多優(yōu)點,得到了很多學者的關注[5-6],已出現了一些基于光纖傳感技術的差壓傳感器。Sheng等[7]、Jose等[8]分別提出了一種基于布拉格光柵的光纖差壓傳感器結構,該傳感器靈敏度較高,但其結構復雜且成本很高,不利于推廣。強度調制是光纖傳感器技術中使用最廣泛的一種調制方法,學者們對該方法進行了研究[9-13],但對基于強度調制的光纖差壓傳感器的研究很少。Kinugasa[14]提出了一種反射式光纖差壓傳感器的構思,利用反射面與光纖距離的變化來檢測外部壓力差的情況。佟成國等[15]設計了一種雙C形彈簧管的光纖差壓傳感器,依據強度調制原理在兩個雙C形彈簧管內對壓差進行檢測。但現有文獻對傳感器的實現、探頭結構的合理性、反射面的工作狀態(tài)、誤差的補償等關鍵因素未做深入研究。本文提出了一種基于反射面形變的光纖束強度調制差壓傳感器,并對傳感器的關鍵技術進行了分析與研究。
1 傳感器的結構及原理
1.1傳感器探頭結構原理
圖1為光纖差壓傳感器探頭部分的結構原理圖。光纖差壓傳感器由兩個結構相同的壓力檢測探頭組成,被測流體首先進入檢測腔A中,A腔內的壓力增大,使彈性膜片發(fā)生形變,彈性膜片緊固在傳感器探頭殼體上,則接收光纖的輸出光強度就會隨之發(fā)生變化,通過檢測出接收光纖輸出光強的變化量來判斷檢測腔內的壓力變化量。這種雙探頭的設計具有以下優(yōu)點:探頭部分能夠自由活動,可以自由選擇需要檢測的位置進行檢測;檢測過程中,探頭可直接固定于檢測位置,而不用進行引流,從而避免了引流管引流過程發(fā)生的凍結、堵塞和遲滯現象;同時還能根據檢測需要,設計出幾何尺寸與檢測范圍不同的探頭,用以滿足一些特殊需求等。
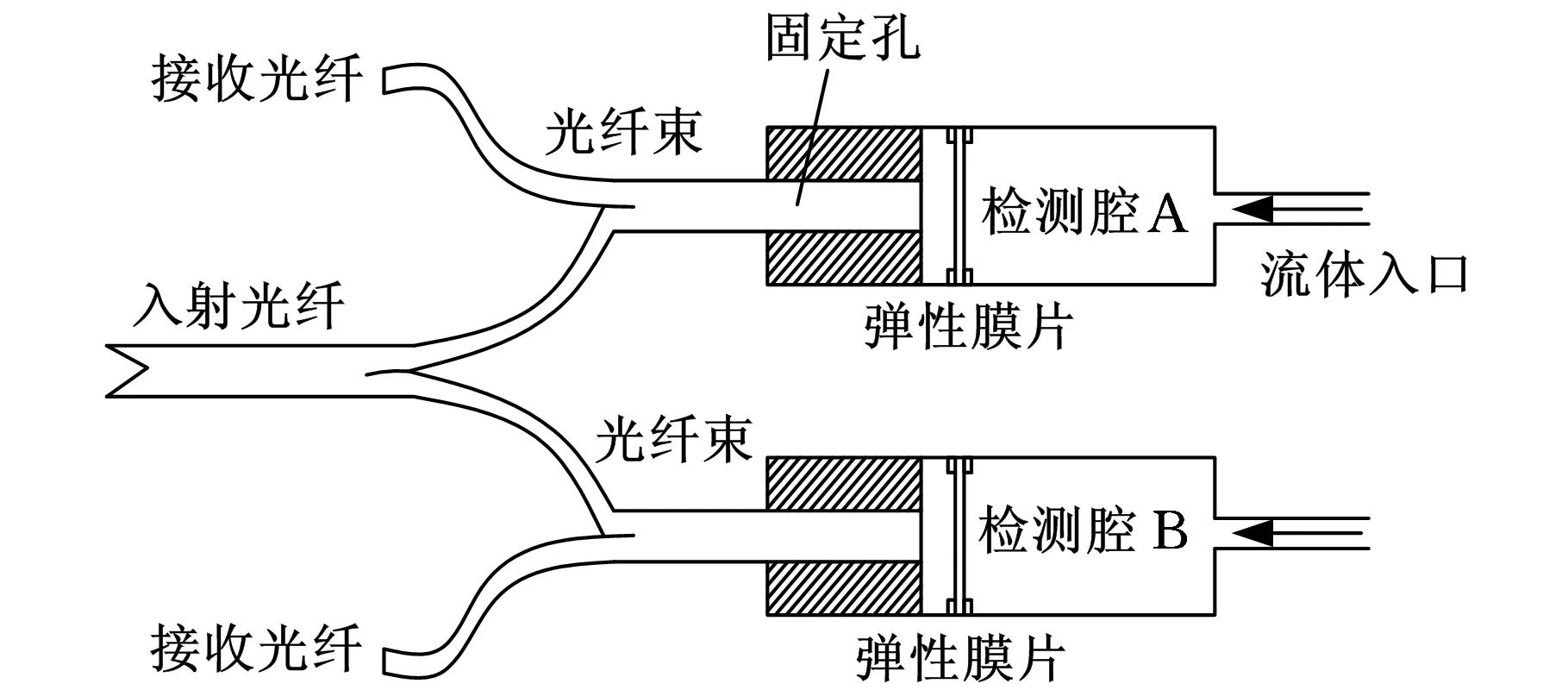
圖1 光纖差壓傳感器結構簡圖
1.2傳感器的封裝
傳感器探頭在工作中要穩(wěn)定可靠,不應受到外界碰撞、振動等因素的干擾,同時為了保護探頭內的敏感元件和解決光纖與反射彈片中心對準問題,避免由兩個探頭本身結構的差異帶來的誤差,就必須對其進行封裝。為了使探頭穩(wěn)固,便于加工實現、裝配及維修更換,本文采用圖2所示的機械式封裝方法。
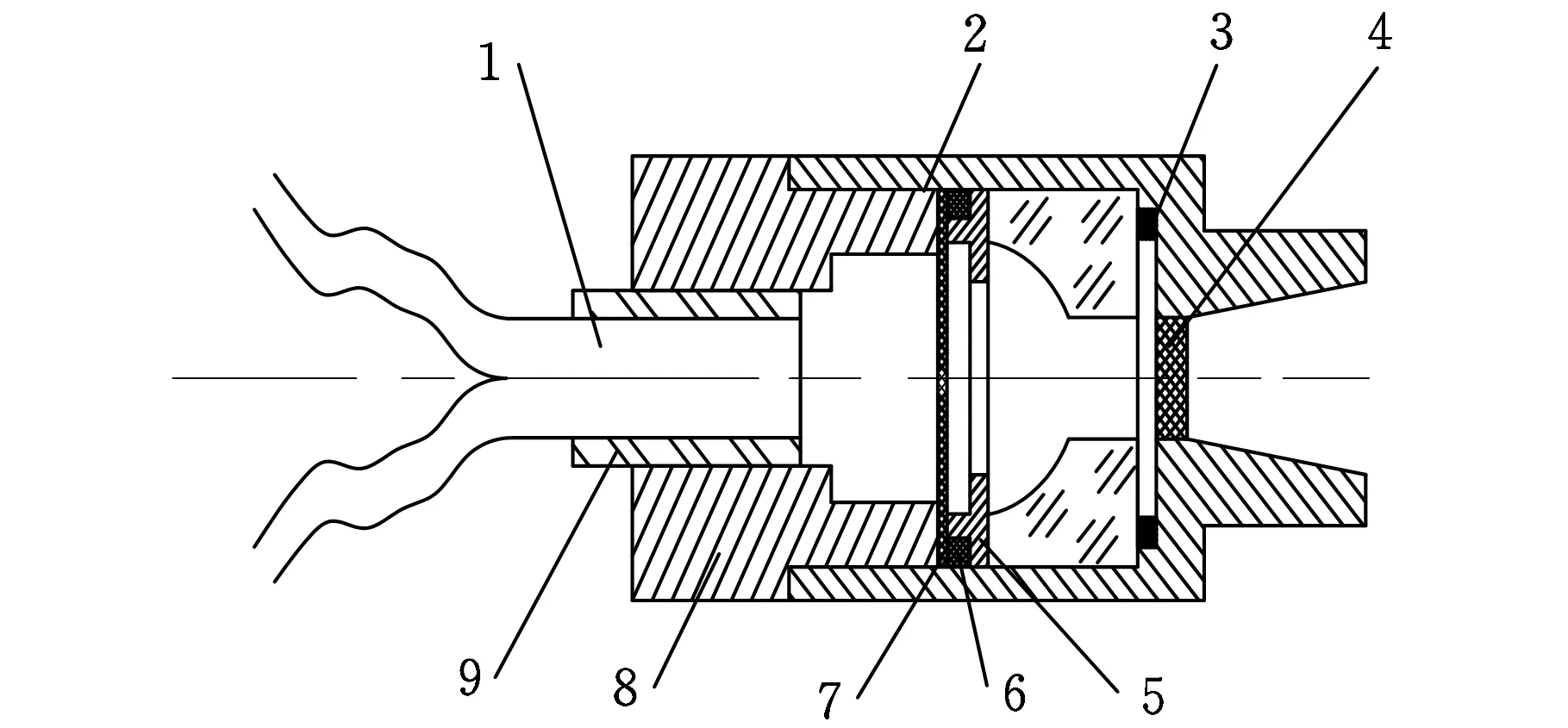
1.光纖束 2.殼體 3.墊圈 4.過濾網 5.擋圈 6.密封圈 7.彈性膜片 8.端蓋 9.螺紋套圖2 探頭封裝結構
圖2中,流體從引入口流入,經過過濾網4后進入檢測腔,為了減少流體的擾動,檢測腔內安裝了具有杯狀空腔的玻璃體,玻璃體通過殼體2與擋圈5進行固定。為了防止泄漏,彈性膜片7與擋圈5之間加裝了密封圈6。彈性膜片通過端蓋8進行壓緊固定,端蓋8與殼體采用緊配合,光纖束1固定在螺紋套9內,加工時能較好地保證傳感器殼體、端蓋、螺紋套的圓度與同軸度,從而能保證光纖束與彈性膜片的中心對準,避免檢測中某個探頭因光纖束與彈性膜片的位置偏差而產生誤差。螺紋套與端蓋采用螺紋連接,并在螺紋套表面刻有刻度,從而可以通過螺紋配合的旋進來調整光纖束與彈性膜片的距離。通過機械封裝還能在光纖束與彈性膜片之間形成暗腔,從而避免背景光帶來的噪聲。
1.3傳感器的強度補償
對于強度調制原理的反射式光纖差壓傳感器,不同探頭的輸出光強度勢必會受到光源波動、光纖長度、光纖彎曲度、耦合器件等因素的影響,從而使檢測結果存在較大誤差,因此,應對光纖差壓傳感器進行強度補償。如圖3所示,利用光橋平衡方法對其進行補償;圖4為其光路的結構圖。
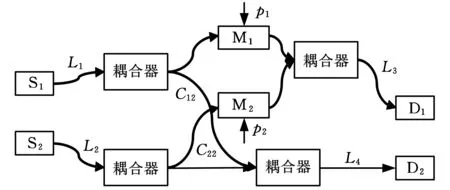
圖3 強度補償原理圖

圖4 光路結構圖
圖3、圖4中,兩光源S1、S2輪流等時發(fā)光,t1表示S1的發(fā)光時間,t2表示S2的發(fā)光時間,t1時間內,光源S1發(fā)出的光經Y形耦合器分為兩路,一路進入探頭M1,經反射后到達光電探測器D1,另一路直接到達光電探測器D2;t2時間內,光源S2發(fā)出的光經Y形耦合器分為兩路,一路進入探頭M2,經反射后到達光電探測器D1,另一路直接到達光電探測器D2。差壓傳感器的兩探頭結構相同,其調制函數分別為
(1)
式中,μ為反射率;p1、p2分別為兩探頭所受到的外界壓力;N為入射光纖與接收光纖的數值孔徑;l為光纖之間的距離;r為光纖半徑;n為接收光纖數量;RB為彈性膜片半徑;A為彈性形變系數;h為光纖與膜片調定距離。
探測器D1、D2的輸出值大小主要由光源輸出光功率、光纖透過率、光探測器靈敏度、耦合器耦合比與檢測探頭調制特性等參數決定。經過圖3的強度補償之后,在t1時間內,探測器D1、D2的輸出值可表示為
(2)
其中,S1、S2分別為兩光源的輸出光功率;L1、L2、L3、L4分別為各輸入、輸出光纖的透過率;D1、D2分別為兩光電探測器的靈敏度;C12、C22為耦合比。在實際測試中,探測器D1、D2均以電壓信號輸出,單位為V。
在t2時間內,探測器D1、D2的輸出值可表示為
(3)
分別將D1、D2的輸出值相除可得
(4)
(5)
以式(4)、式(5)的比值作為最后的測量值:
(6)
再把調制函數M1、M2代入式(6)可得
(7)
因為設計中傳感器兩探頭的結構相同,所以可認為其結構參數N、l、r、n、RB、A、h相等,則輸出值R的大小由兩探頭外界壓力p1、p2所決定。
由式(7)還可看出,光源功率的波動、光纖傳輸損耗的變化以及光探測器靈敏度的漂移都已經得到了消除,而耦合比對系統誤差的影響已經很小,可通過后期的計算對其進行修正。
2 實驗結果及分析
應用上文設計的光纖束差壓傳感器進行強度補償效果實驗,實驗中使用光強檢測系統分別檢測兩傳感器探頭輸出的電信號,其檢測系統如圖5所示。

圖5 光強檢測系統
實驗中光源選用半導體激光器LD,該激光器具有很窄的輸出光譜線寬和出色的邊模抑制比,其輸出峰值波長為1310 nm。光電探測器選用PIN光電二極管,該光電二極管工作波長范圍為1100~1650 nm,暗電流最大為1 nA,光響應度最小為0.85 A/W,響應時間為0.1 ns。調定傳感器探頭中光纖束與膜片的初始距離為0.5 mm,膜片材料為不銹鋼表面鍍鋁鏡,光纖束為多股入射光纖與單股出射光纖加工成束。通過控制電路使光源輪流發(fā)光,其發(fā)光間隔時間設置為15 s,在外界壓力作用下,測試結果(兩測試探頭的作用壓力均為20 kPa)如圖6、圖7所示。

圖6 D1、D2輸出值
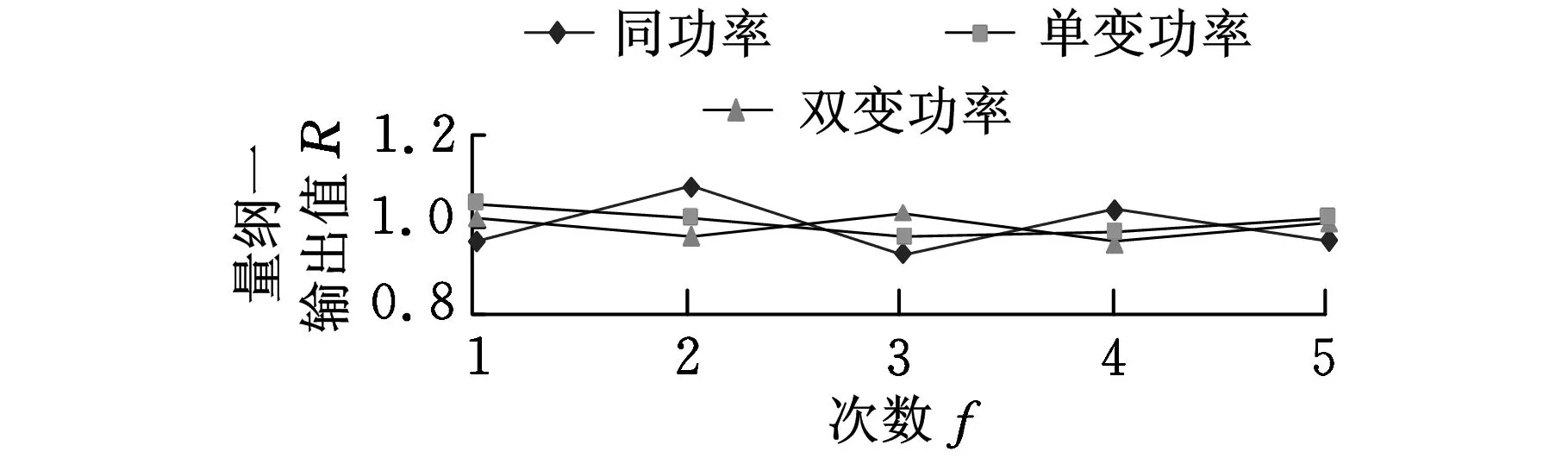
圖7 強度補償R值
圖6、圖7所示分別為對傳感器兩探頭施加相同壓力且壓差為0時,光源產生功率波動,經過光電探測器檢測到的兩探頭電壓值。第一次記錄時間為10 s,以后每隔15 s記錄一次。當光源為同功率輸出時,輸出電壓值變化很小,在圖6中近似為一條直線;當光源為變功率輸出時,輸出電壓值變化較明顯,在圖6中呈鋸齒形的波狀。如果不對這類波動進行強度補償,得到的測量值與真實值之間就存在較大誤差。因此,本文應用圖3所示強度補償方法對其進行了補償。圖7中的R值即為應用補償算法得到的數據處理結果,可以看出,即使光源發(fā)生了較大功率變化,R值也在1附近變化,不難算出同功率時R=0.9982,單變功率時R=1.008,雙變功率時R=0.9968,這就說明通過強度補償后的輸出值不會隨光源的波動而變化,其輸出值主要由兩探頭之間的差壓大小所決定,從而通過本設計能較好地實現誤差補償。
圖8所示為兩傳感探頭在不同的壓力作用下,形成不同的壓差Δp時,輸出的R值變化情況。從圖8中可看出負壓(即探頭2壓力大于探頭1壓力)與正壓(即探頭1壓力大于探頭2壓力)的前端曲線線性度較好,可把線性度很好的-40~40 kPa壓力區(qū)域作為差壓傳感器的工作區(qū)域,再對強度補償后的R值進行平移及線性化標定,即可使輸出值與各壓差值較好地對應,從而實現對外界壓差的檢測。
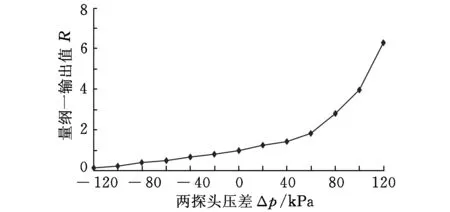
圖8 Δp-R曲線
3 結論
(1)本文提出了一種雙探頭結構的自由式光纖束差壓傳感器,這種雙探頭的設計使得探頭能夠自由活動,可以自由選擇需要檢測的位置進行檢測。探頭還能直接固定于檢測位置,而不用進行引流,從而避免了引流管引流過程發(fā)生的凍結、堵塞和遲滯現象。根據檢測需要,還可設計出幾何尺寸與檢測范圍不同的探頭,從而滿足一些特殊需求。
(2)對傳感器探頭結構進行了設計,采用機械式封裝方法對其進行了封裝,使探頭具有穩(wěn)固、便于加工實現、便于裝配、便于維修更換等優(yōu)點,同時還能使兩探頭結構相同,從而避免了由兩個探頭本身結構的差異帶來的誤差。對傳感器進行了強度補償設計,應用光橋平衡補償法實現了傳感器的強度補償,經過該方法的強度補償后其輸出值為式(6),可見這一輸出量R僅由兩探頭外界壓力值的變化所決定。
(3)應用該傳感器結構進行了實驗,實驗結果表明,傳感器的強度補償效果明顯,經過強度補償后的信號,通過后期的計算處理即可對兩傳感探頭之間的壓差值進行輸出,從而實現差壓傳感器的檢測過程。
[1]Albert C J, Steven C. Thermal Stress Analysis for Differential Pressure Sensors[C]//Proceedings of International Mechanical Engineering Congress and Exposition. Orlando,2005.
[2]Firtat B, Moldovan C,Iosub R, et al. Differential Piezoresistive Pressure Sensor[C]//International Semiconductor Conference.Sinaia, 2007: 87-90.
[3]Hein S, Holzne K, Schlichting V, et al.Capacitive Differential Pressure Sensor with High Overload Capability Using Silicon Glass Technology[C]//International Conference on Solid-state Sensors and Actuators.Chicago, 1997:1477-1480.
[4]Shanmugavalli M, Uma G, Umapathy M. Uncertainty Analysis of Micro Differential Pressure Sensor Using Interval Analysis[J].International Journal on Smart Sensing and Inteligent Systems,2009,2(3):463-476.
[5]魏莉,周祖德,黃俊,等.一種光纖光柵非接觸機械振動傳感器的研究[J].中國機械工程,2013,24(14):1873-1876.
Wei Li, Zhou Zude, Huang Jun, et al. Study on Non-contact Mechanical Vibration Sensor with FBG[J].China Mechanical Engineering, 2013,24(14):1873-1876.
[6]丁國平,周祖德,胡業(yè)發(fā).基于光纖光柵的磁力軸承磁力在線測量系統[J].中國機械工程,2009,20(11):1331-1334.
Ding Guoping, Zhou Zude, Hu Yefa. Fibre Bragg Grating Based Magnetic Force Online Measurement System for Magnetic Bearings[J].China Mechanical Engineering,2009,20(11):1331-1334.
[7]Sheng Haojan, Liu Wenfung, Lin Kueiru,et al. High-sensitivity Temperature-independent Differential Pressure Sensor Using Fiber Bragg Gratings[J].Optics Express,2008,16(20):14-18.
[8]Jose L A V, Manoel F D S, Ricardo F S, et al.Fiber Optics Differential Pressure Transducer: US,7266261[P].2007-09-04.
[9]Rindorf L, Hoiby P E, Jensen J B,et al. Towards Biochips Using Microstructured Optical Fiber Sensors[J].Analytical and Bioanalytical Chemistry,2006,385(8):1370-1375.
[10]Tang Yu, Liu Chuanju. Study on Optical Fiber Sensor and Its Application[J].Science & Technology Information,2009(7):17-18.
[11]Zawawi M A, O’Keffe S,Lewis E. Intensity-modulated Fiber Optic Sensor for Health Monitoring Applications:a Comparative Review[J].Sensor Review, 2013, 33(1): 57-67.
[12]Nevshupa R, Conte M, van Rijn C. Measurement Uncertainty of a Fiber-optic Displacement Sensor[J]. Measurement Science and Technology, 2013, 24(3):510-514.
[13]Moro E A, Todd M D, Puckett A D.Performance Optimization of Bundled Fiber Optic Displacement Sensors[C]//Proc. SPIE, Smart Sensor Phenomena, Technology, Networks and Systems Integration. San Diego, 2012:1112-1117.
[14]Kinugasa S.Differential Pressure Sensor Using Common Optical Fiber Path[C]//IEEE Sensors 2006, EXCO.Daegu, 2006: 1039-1042.
[15]佟成國,楊軍,劉志海,等.雙彈簧管光纖差壓傳感器[J].光子學報,2004,33(10):1172-1175.
Tong Chengguo,Yang Jun,Liu Zhihai,et al. Fiber Optic Diferefitial Pressure Sensor with Twin Borden Tubes[J].Acta Photonica Sinica,2004,33(10):1172-1175.
(編輯陳勇)
A Kind of Freestyle Optical Fiber Bundle Differential Pressure Sensor Based on Intensity Compensation
Hu Hao1Zhong Liqiong1,2Zhang Dabin1
1.Guizhou University,Guiyang,5500252.Guiyang College,Guiyang,550003
A kind of freestyle optical fiber bundle differential pressure sensor based on intensity compensation was designed and researched. Firstly, the sensor probe part was designed with double probe and the same structure, and was packaged by mechanical style. Then, the sensor fiber part was designed and analyzed on the intensity compensation, after the compensation, the output value ofRwas analyzed theoretically with the modulation functionM. Finally,Rwas tested out under different conditions, changing the output power of the light source when there is same pressurep=20 kPa in two probes, or inputting different pressures in two probes.Experimental results show that: through strength after compensation, the output valueR≈1, at the same time under the influence of different pressure differentials, the output valueRand pressure difference Δpwithin a certain area is of a good linear relationship. Through the above research it is proved that the effects of intensity compensation are obvious and can detect pressure difference.
intensity compensation;freestyle;optical fiber bundle;differential pressure sensor
2013-08-28
貴州省科學技術基金資助項目(20112190);貴州省科技廳、貴陽市科技局、貴陽學院聯合基金資助項目(LKG201339)
TH74;TH823DOI:10.3969/j.issn.1004-132X.2015.02.010
胡浩,男,1980年生。貴州大學機械工程學院講師。主要研究方向為傳感器技術、機械制造等。發(fā)表論文9篇。鐘麗瓊(通信作者),女,1981年生。貴陽學院機械工程學院講師,貴州大學機械工程學院博士研究生。張大斌,男,1976年生。貴州大學機械工程學院副教授。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
